Анализ основных вариантов исполнения КТВС
Использование ЭОП и ПЗС матрицы в одном приборе. ПЗС – матрица с электронной чувствительностью, TEP-фотокатод
Общие сведения об оптических волокнах и изготовляемых из них деталях
Изготовление вакуумного блока (ВБ) ЭОП
Расчёт стоимости проведения НИОКР
Технико-экономическое обоснование
Описание прибора
Расчет параметров лазерного изделия, необходимых для определения предельно допустимого уровня мощности
Средства защиты от опасных факторов
Охрана окружающей среды
Навигация
Проектирование круглосуточной оптико-телевизионной системы
Проектирование круглосуточной оптико-телевизионной системы
93499
знаков
13
таблиц
24
изображения
Оглавление.
2. Научно-исследовательская часть 2.1 Обоснование выбора оптической схемы КТВС
3. Конструкторская часть
1. Введение
2. Научно-исследовательская часть
2.1 Обоснование выбора оптической схемы КТВС
2.2 Габаритный расчет и светоэнергетический расчет
2.3 Аберрационный расчет объектива НУТВ
Вывод
3. Конструкторская часть
3.1 Анализ основных вариантов исполнения КТВС
3.2 Описание конструкции КТВС и ее узлов
Вывод
4. Технологическая часть
4.1 Общие сведения об оптических волокнах и изготовляемых из них деталях
4.2 Изготовление МКП
4.3 Изготовление ВОЭ180
4.4 Изготовление вакуумного блока ЭОП
Вывод
5. Организационно-экономическая часть
5.1 Определение сроков проведения НИОКР
5.2 Расчёт стоимости проведения НИОКР
5.3 Технико-экономическое обоснование
Вывод
6. Охрана труда и экология
Вывод
7. Заключение
1. Введение
Российская Федерация является одним из самых богатых морскими биоресурсами государств. Качество продуктов, добытых в Каспийском и дальневосточных морях, известно во всем мире. Морской промысел приносит существенную прибыль частным и государственным компаниям и, если ведется легально, является весьма доходной статьей местных бюджетов.
Однако в последнее время наблюдается существенный рост нелегального промысла, который не только не приносит дохода государству, но и наносит непоправимый вред окружающей среде.
Двумя основными причинами этого явления являются несовершенство законодательства, а также разница в технической оснащенности т. н. "браконьеров" и сотрудников правоохранительных органов. Первые пользуются новейшими техническими достижениями:
· системы спутниковой навигации;
· акустические приборы для поиска рыбы;
· оптические приборы наблюдения за окружающей обстановкой;
В результате при приближении сотрудников правоохранительных органов преступники сбрасывают в море нелегально добытую живность и несоответствующую нормам снасть. Юридически доказать факт незаконного промысла становится практически невозможно.
Эта неблагоприятная ситуация лишь усугубляется в ночных условиях, когда заниматься браконьерством можно почти безнаказанно.
Ясно, что назрела необходимость оснащения сотрудников правоохранительных органов наблюдательными комплексами, которые позволили бы:
· скрытно (с большого расстояния) вести наблюдение за рыболовецким судном;
· распознавать название судна, нанесенное на его борт;
· определять географические координаты судна;
· проводить видеосъемку обстановки на палубе;
· работать в круглосуточном режиме.
Проводящиеся в данный момент в мире научные разработки в области:
· технологии изготовления видеокамер на основе матричных приемников излучения (МПИ) с пространственно-зарядовой связью (ПЗС);
· технологии изготовления усилителей яркости – электронно-оптических преобразователей;
· технологии изготовления быстродействующих микропроцессоров для цифровой обработки информации и управления приборами;
· технологии изготовления микрогироскопов и микроакселерометров для создания на их основе миниатюрных систем позиционирования;
· технологии автоматизированного расчета оптических систем;
· развития спутниковых систем навигации (в том числе отечественных) позволяют создать такой комплекс.
В данном дипломном проекте приведено техническое обоснование оптико-электронной системы комплекса.
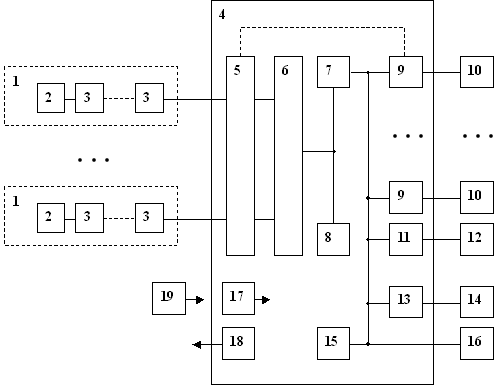
Конструкторские проработки предусматривают такой подход к проектированию системы, который обеспечит технические требования при минимальной стоимости. По своему принципу построения разработанная в дипломном проекте круглосуточная оптико-телевизионная система (КТВС) является модульной, базируется на трех основных узлах:
· низкоуровневая телевизионная система (НУТВ), имеющая в своем составе ЭОП;
· дневная телевизионная система (ДТВ);
· лазерная осветительная система (ЛОС) на основе пяти полупроводниковых лазеров.
Данная КТВС располагается на поворотном устройстве, оснащенном бесплатформенной инерциальной системой (БИНС), которая определяет угловые координаты цели относительно комплекса.
ЭОП работает в режиме стробирования. Это позволяет не только уменьшить помеху обратного рассеяния (что крайне важно в плохих погодных условиях), но и использовать НУТВ как дальномер, определяющий расстояние до цели.
В системе цифровой обработки изображения применен алгоритм распознавания надписей, существенно повышающий надежность распознавания.
Спутниковая система навигации при известных географических координатах комплекса, относительных угловых координатах цели, расстоянии до цели может определить ее географические координаты.
Все эти данные выводятся на монитор, где их наблюдает человек-оператор.
Таким образом, КТВС – это сложный оптико-электронный прибор, выполняющий задачи в составе наблюдательного комплекса. Дипломный проект посвящен созданию современной КТВС, не уступающей по своим характеристикам зарубежным аналогам.
В дипломном проекте на тему "Проектирование круглосуточной оптико-телевизионной системы" содержатся следующие части: научно-исследовательская, конструкторская, технологическая, организационно-экономическая, охрана труда и экология.
2. Научно-исследовательская часть 2.1 Обоснование выбора оптической схемы КТВС
Обоснование выбора оптической схемы объектива ночного канала
Задача объектива ночного канала – осуществить оптическое сопряжение плоскости объекта и плоскости фотокатода ЭОП.
Предметная плоскость находиться ориентировочно на расстоянии
L = 7000 м от первой поверхности объектива, а фокусное расстояние (см. "Габаритный расчет") равно f’= 1,307 м. Согласно известному критерию L ≥ 20 f’ можно считать, что предмет находится в бесконечности, а следовательно объектив является фотографическим.
Однако классическая схема такого объектива имеет существенный недостаток – продольные габариты объектива более чем в 2 раза превышают заданные в ТЗ габариты всего прибора. Рациональным решением будет введение в оптическую схему зеркальных поверхностей.
При относительном отверстии 1 : 5,2 (см. "Габаритный расчет") возникнут аберрации, для компенсации которых понадобятся линзовые элементы.
В итоге получим тип оптической схемы: зеркально-линзовый фотографический объектив.
Обоснование выбора оптической схемы объектива переноса ночного канала
Задача объектива ночного канала – осуществить оптическое сопряжение плоскости ПЗС матрицы и плоскости люминофорного экрана ЭОП.
Очевидно, что тип оптической схемы в данном случае: проекционный объектив.
Обоснование выбора оптической схемы объектива дневного канала
При относительном отверстии 1 : 10 и меньшем в 2 раза, по сравнению с объективом ночного канала, фокусном расстоянии рационально применить схему: двухлинзовый склеенный фотографический объектив.
Обоснование выбора оптической схемы коллиматора лазерной системы подсветки
В связи с тем, что расчет оптических систем при гауссовом распределении энергии в поперечном сечении пучка лучей существенно более сложен, чем при равномерном, доверим выбор оптической схемы специальному ПО, разработанному на кафедре РЛ2 МГТУ им. Н. Э. Баумана.
В результате получим: двухлинзовый склеенный объектив в обратном ходе лучей (коллиматор) без дефокусировкиотносительно перетяжки лазерного пучка.
2.2 Габаритный расчет и светоэнергетический расчетГабаритный расчет
Габаритный расчет оптической схемы НУТВ
1) Определение фокусного расстояния объектива.
Найдем размер изображения ПЗС матрицы на фотокатоде ЭОП.
![]() (1)
(1)
![]() (2)
(2)
Где
Ver, gor – вертикальная и горизонтальная стороны изображения матрицы соответственно,
lv = 4,8 мм – длина вертикальной стороны матрицы,
lh = 6,4 мм – длина горизонтальной стороны матрицы,
Г = -0,46х – линейное увеличение объектива переноса (см. ниже).
Линейное увеличение ЭОП равно единице и не учитывается.
Определим фокусное расстояние объектива как:
![]() (3),
(3),
где
2ωгор = 0,61° - заданное в ТЗ угловое поле оптической системы в горизонтальной плоскости.
Проверим, соответствует ли угловое поле в вертикальном направлении требованиям ТЗ при данном фокусе:
 (4),
(4),
где
2ωвер = 0,46° - заданное в ТЗ угловое поле оптической системы в вертикальной плоскости.
2) Определение диаметра входного зрачка объектива.
Очевидно, что дальность распознавания будет увеличиваться с увеличением диаметра входного зрачка, и его следует сделать как можно большим. Верхнее ограничение обуславливают технологические возможности, условия коррекции аберраций, массогабаритные рамки. Исходя из этого, примем: Dнутв = 250 [мм].
3) Расчет увеличения объектива переноса.
Диаметр экрана ЭОП равен 18 мм. Изображение ПЗС-матрицы объективом переноса должно быть вписано в экран, чтобы обеспечить комфортное наблюдение.
Размеры матрицы – 6,4 х 4,8 [мм2]. Следовательно, её диагональ равна 8 мм, а увеличение объектива переноса: |Гtr| = 8/18 = 0,46(5)
Габаритный расчёт оптической схемы дневного канала.
1) Найдем фокусное расстояние объектива.
В данном случае изображение ограничивается полевой диафрагмой, геометрически являющейся входным окном самой ПЗС матрицы размером 6,4 х 4,8 мм2.
Проведя расчет, аналогичный п. 2.2.2.1, получим ![]() мм.
мм.
Примем ![]() = 600 мм.
= 600 мм.
2) Расчет диаметра входного зрачка объектива.
См. расчет дальности распознавания.
Габаритный расчёт оптической схемы лазерного коллиматора
В данном осветителе используется лазерный излучатель ИЛД-20 самарского предприятия "Инжект". Его технические данные:
· Тип активной среды: полупроводниковая структура на основе Ga-As.
· Тип накачки: инжекция носителей электрическим током.
· Длина волны излучения λ = 850 нм.
· Длительность импульса τи = 10-7 с.
· Частота следования импульсов Fи = 10 кГц.
· Мощность одного импульса Pи = 20 Вт.
· Размер излучающей области dлазвер x dлазгор = 0,001 х 0,470 мм2.
· Расходимость излученияδлазвер x δлазгор = 30° х 10°.
· Поляризация излучения ТЕ (Е в плоскости p-n перехода).
1) Определим фокусное расстояние коллиматора.
Так как протяженность излучающей области по горизонтали намного больше, то очевидно, что при нахождении нужно обеспечить горизонтальную расходимость. Удовлетворяющее этому условию фокусное расстояние обеспечит вертикальную расходимость автоматически.
Для согласованности каналов примем расходимость по горизонтали лазерного пучка 2σ не более 1,8°. Тогда:
 мм(6)
мм(6)
2) Определение диаметра входного (в обратном ходе лучей) зрачка коллиматора.
Излучение лазера по уровню 0,5 должно попадать на коллиматор. Так как в вертикальной плоскости его расходимость больше, то именно она и будет определять диаметр коллиматора:
 мм (7)
мм (7)
3) Определение истинных габаритных размеров.
Очевидно, что проведенные выше расчеты по формулам классической оптики являются приблизительными для лазерного излучения. Уточнив расчет при помощи компьютерной программы, разработанной на кафедре РЛ2, получим:
![]()
![]()
Расчёт дальности распознавания объекта
Дальность видения (предельная) – это расстояние, на котором изображение, полученное оптико-электронным прибором, воспринимается с требуемым уровнем видения. Для введения критериев, определяющих возможный уровень видения, вводится понятие эквивалентной миры. Объект исследования характеризуется критическим размером Hкр. На нём укладывается несколько (N) периодов (Tmir) эквивалентной миры. Число N определяет уровень восприятия и вероятность восприятия. Контраст миры и условия её наблюдения должны соответствовать контрасту и условиям наблюдения объекта.
Критерии Джонсона[1] связывают число N с вероятностью восприятия:
| Уровень видения | N ( p = 50% ) | N ( p = 95% ) |
| Обнаружение | 1 | 2 |
| Различение | 4 | 8 |
| Идентификация | 8 | 16 |
Установив связь между контрастом изображения шпальной миры и воспринимаемым отношением сигнал/шум, мы можем найти такое расстояние L, при котором воспринимаемое отношение сигнал/шум примет пороговое значение.
Так как в приборе будет использоваться алгоритм цифрового распознавания надписей, то нет необходимости обеспечивать вероятность визуальной идентификации p = 95% при N=16. Примем N = 10.
Расчет дальности распознавания объекта НУТВ
Данные для расчёта:
1) Входной объектив.
Фокусное расстояние Fob = 1307 мм.
Диаметр входного зрачка (кольцевой зрачок имеет минимальный и максимальный диаметры) D = 250 мм, d = 120.
Рабочий диапазон: ∆λ = 0,6 – 0,9 мкм.
Интегральный коэффициент пропускания в рабочем диапазоне: Kob(λ) = 0,8.
Центральная длина волны λ0 = 0,75 мкм.
2) Электронно-оптический преобразователь 58 ЭГ.
Увеличение Гamp = 1х.
Диаметр фотокатода 18 мм.
Интегральная чувствительность фотокатода SpcΣ = 1200 мкА/лм.
Шум-фактор ЭОП Fn = 4,6.
Коэффициент преобразования 25000.
Плотность темнового тока Jth = 9∙10-14 А/см2.
Коэффициент умножения МКП ![]() = 200.
= 200.
Эффективность люминофора ![]() = 0,06 Вт/Вт.
= 0,06 Вт/Вт.
Напряжение разгона электронов ![]() = 5600 В.
= 5600 В.
ФПМ на частоте 55 мм-1 имеет значение 0:
· Нормированная спектральная чувствительность фотокатода Spc_norm(λ):
3) Объектив переноса.
· Коэффициент преобразования плотности излучения экрана оптикой переноса, равный отношению освещённости на ПЗС-матрице к светимости экрана ЭОП ![]() = 0,095.
= 0,095.
· Увеличение |Гtr| = 0,46x.
· Коэффициент передачи модуляции объективом на пространственной частоте 60 мм-1 в пространстве изображений: для точки на оси не менее 0,7; для края линейного поля зрения оптической системы в пространстве изображений не менее 0,6.
4) ПЗС-матрица.
· Коэффициент спектрального соответствия люминофора экрана чувствительности ПЗС ![]() = 0,9.
= 0,9.
· Интегральная чувствительность ПЗС ![]() = 0,19 А/Вт.
= 0,19 А/Вт.
· Коэффициент использования времени накопления глаза ![]() = 1.
= 1.
· Размерность по горизонтали и вертикали Nv = 596, Nh = 795 элементов.
· Эффективные (с учётом локальных линз и анти-алиас фильтров) размеры элемента матрицы по горизонтали и по вертикали ![]() .
.
· Шаг матрицы по горизонтали и вертикали ![]() мкм,
мкм, ![]() мкм.
мкм.
· Темновой ток матрицы Idk = 1,5∙10-9 А.
5) Электронный тракт.
В расчетах не учитываем.
7) Фоноцелевая обстановка.
7.1) Цель №1: буква на борту судна, являющаяся частью его названия.
Имеет высоту 1,8 м, ширину 0,5 м, покрашена белилами свинцовыми № 20 с алюминиевым наполнителем[4].
Фон - борт судна. Покрыт алкидной смолой № 3875 с сажевым наполнителем.

Рис. 1. Спектральный коэффициент отражения алкидной смолы с сажевым наполнителем.
7.2) Цель №2: корма судна в море. Имеет высоту 3 м, ширину 6 м. Покрыта алкидной смолой № 3875 с сажевым наполнителем[4] (см. рис. 5).
Фон – морская поверхность.
· Естественная ночная освещённость ЕV = 5 ∙ 10-3 лк.
· Расчёт отношения сигнал/шум для цели №1.
Найдём максимум спектральной чувствительности фотокатода ЭОП к энергетическому потоку по известной интегральной чувствительности фотокатода к световому потоку по формуле:
 [мА/Вт], (8),
[мА/Вт], (8),
где
V(λ) – нормированная кривая спектральной чувствительности глаза:
![]() - интегральная чувствительность фотокатода [мкА/лм],
- интегральная чувствительность фотокатода [мкА/лм],
![]() - нормированная спектральная чувствительность фотокатода,
- нормированная спектральная чувствительность фотокатода,
![]() - относительная спектральная плотность излучения источника типа А.
- относительная спектральная плотность излучения источника типа А.
Спектральную плотность излучения источника типа А (Т = 2856 К) найдём по формуле Планка[3]:
 [Вт/м3], где(9)
[Вт/м3], где(9)
λ – длина волны [м],
Т – температура [К],
c1 = 3,7415∙10-16 [Вт∙м2],
c2 = 1,43880∙10-2 [м∙К].
Продифференцировав это выражение, а затем приравняв результат к нулю, мы найдём из полученного уравнения длину волны λмакс, на которой излучение наиболее интенсивно:
![]() λмакс = 1,015 [мкм].
λмакс = 1,015 [мкм].
Очевидно, что
![]() :(10)
:(10)
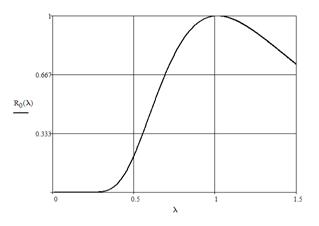
Рис. 2. Нормированная кривая спектральной яркости источника типа А.
Таким образом, после интегрирования получим: ![]() = 152,448 [мА/Вт].
= 152,448 [мА/Вт].
· Относительная спектральная яркость ночного неба Rnight(λ) в диапазоне 0,4 – 1 мкм соответствует относительной спектральной яркости источника типа А (см. рис. 7).
Найдем яркость объекта:
Если считать Солнце абсолютно черным телом с температурой Т = 5217 К, то коэффициент использования глазом излучения такого источника будет равен:
 , где(11)
, где(11)
![]() - относительная спектральная яркость Солнца.
- относительная спектральная яркость Солнца.
Интегральную облученность объекта найдём по формуле:
![]() (12)
(12)
Максимум спектральной облученности:
 (13)
(13)
Спектральная облученность объекта:
![]() (14)
(14)
И, наконец, спектральная энергетическая яркость
диффузно отражающего объекта:
![]() (15)
(15)
· Число электронов, испускаемое фотокатодом за время ![]() =0,2 с вследствие темновой эмиссии, определяется следующим соотношением:
=0,2 с вследствие темновой эмиссии, определяется следующим соотношением:
![]() , где(16)
, где(16)
Jth – плотность темнового тока [А∙см-2],
e – заряд электрона [Кл],
Smir – площадь миры [м2],
L – расстояние до объекта [м],
Fob – фокусное расстояние объектива [мм].
· ![]() - число электронов, полученное от фотокатода за время
- число электронов, полученное от фотокатода за время ![]()
![]() (постоянная времени глаза) при облучении от зон миры, соответствующих объекту и фону:
(постоянная времени глаза) при облучении от зон миры, соответствующих объекту и фону:
 (17)
(17)

Где:
D – внешний диаметр входного зрачка [мм],
d – внутренний диаметр входного зрачка,
Kob(λ) – спектральная характеристика пропускания объектива,
Spc(λ) – спектральная чувствительность фотокатода [мА∙Вт-1],
W – коэффициент погоды,
α = 3,91/Sm , где Sm – метеорологическая дальность видимости [м],
Рекомендуемые значения для расчётов: Sm = 18 [км] и W = 0,5, что соответствует нормальным условиям.
![]() - спектральные коэффициенты отражения объекта и фона.
- спектральные коэффициенты отражения объекта и фона.
Спектральная чувствительность фотокатода Spc(λ) определяется по формуле
![]() и имеет тот же вид, что и нормированная спектральная чувствительность, приведённая в данных к расчёту.
и имеет тот же вид, что и нормированная спектральная чувствительность, приведённая в данных к расчёту.
Nлаз – число лазеров в батарее подсветки.
![]() = 0,9 – коэффициент пропускания объектива на длине волны лазерного излучения.
= 0,9 – коэффициент пропускания объектива на длине волны лазерного излучения.
![]() - коэффициент отражения объекта на длине волны лазерного излучения.
- коэффициент отражения объекта на длине волны лазерного излучения.
![]() - коэффициент отражения фона на длине волны лазерного излучения.
- коэффициент отражения фона на длине волны лазерного излучения.
![]() - спектральная чувствительность на фотокатода длине волны лазерного излучения.
- спектральная чувствительность на фотокатода длине волны лазерного излучения.
![]() = 3 ∙ 108 [м/с] – скорость распространения импульса подсвечивающего излучения.
= 3 ∙ 108 [м/с] – скорость распространения импульса подсвечивающего излучения.
Pи- мощность лазерного излучения в импульсе [Вт].
Q – скваженость импульсов.
2σ – расходимость лазерного излучения [рад].
· Рассчитаем коэффициент умножения электронов:
![]() , где(18)
, где(18)
![]() - коэффициент умножения МКП,
- коэффициент умножения МКП,
![]() - напряжение разгона электронов ЭОП [В],
- напряжение разгона электронов ЭОП [В],
![]() - эффективность люминофора экрана ЭОП [Вт/Вт],
- эффективность люминофора экрана ЭОП [Вт/Вт],
![]() - коэффициент преобразования плотности излучения экрана оптикой переноса, равный отношению освещённости на ПЗС-матрице к светимости экрана ЭОП,
- коэффициент преобразования плотности излучения экрана оптикой переноса, равный отношению освещённости на ПЗС-матрице к светимости экрана ЭОП,
![]() - коэффициент спектрального соответствия люминофора экрана чувствительности ПЗС,
- коэффициент спектрального соответствия люминофора экрана чувствительности ПЗС,
![]() - интегральная чувствительность ПЗС [А/Вт],
- интегральная чувствительность ПЗС [А/Вт],
![]() - коэффициент заполнения матрицы ПЗС, определяется по формуле:
- коэффициент заполнения матрицы ПЗС, определяется по формуле:
![]() , где(19)
, где(19)
![]() - эффективные (с учётом локальных линз и анти-алиас фильтров)
- эффективные (с учётом локальных линз и анти-алиас фильтров)
размеры элемента матрицы по горизонтали и по вертикали [мкм х мкм],
![]() ,
,![]() - шаг матрицы по горизонтали и вертикали [мкм х мкм].
- шаг матрицы по горизонтали и вертикали [мкм х мкм].
Подставив численные значения, получаем:
![]() .
.
![]() .
.
· Число темновых электронов, получаемое от ПЗС-матрицы за время ![]() с площади изображения миры рассчитывается как:
с площади изображения миры рассчитывается как:
![]() , где(20)
, где(20)
![]() - количество пикселей на площади изображения миры на ПЗС;
- количество пикселей на площади изображения миры на ПЗС;
![]() - число темновых электронов, получаемое от одной чувствительной площадки ПЗС-матрицы за время
- число темновых электронов, получаемое от одной чувствительной площадки ПЗС-матрицы за время ![]() .
.
Количество пикселей на площади изображения миры на ПЗС:
 (21)
(21)
Число темновых электронов, получаемое от одной чувствительной площадки ПЗС-матрицы за время ![]() :
:
![]() , где(22)
, где(22)
Idk – темновой ток матрицы [А],
Nv, Nh – размерность матрицы.
Таким образом: ![]()
Проведём расчёт сквозной передаточной функции ночного канала.
1) ФПМ входного объектива.
Пространственная частота для объектива (в его фокальной плоскости):
![]() [мм-1] (23)
[мм-1] (23)
ФПМ определим по данным CАПР Zemax
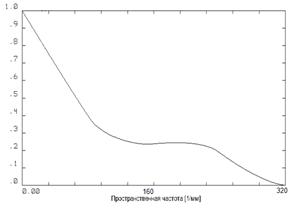
Рис. 3. Функция передачи модуляции объектива ночного канала.
2) Рассчитаем ФПМ электронно-оптического преобразователя.
Пространственная частота для ЭОП (в плоскости фотокатода):
![]() [мм-1].(24)
[мм-1].(24)
ФПМ ЭОП была приведена в данных к расчёту.
3) Рассчитаем ФПМ объектива переноса.
Пространственная частота для объектива переноса (в плоскости люминофорного экрана ЭОП):
![]() [мм-1].(25)
[мм-1].(25)
ФПМ объектива переноса приведена в данных к расчёту.
4) Рассчитаем ФПМ ПЗС-матрицы.
Пространственная частота для ПЗС – матрицы (в её чувствительной плоскости):
![]() [мм-1](34)
[мм-1](34)
ФПМ ПЗС, определяемая геометрией матрицы:
 (26)
(26)
ФПМ ПЗС, определяемая диффузией заряда ПЗС-матрицы в направлении, перпендикулярном считыванию:
 ,(27)
,(27)
где 𝛽 – размер плоской вершины пикселя, мкм.
Для большинства современных ПЗС на пространственных частотах 20…40 1/мм снижение ![]() составляет 3…4%, следовательно можно принять линейную аппроксимацию:
составляет 3…4%, следовательно можно принять линейную аппроксимацию:
![]() (28)
(28)
ФПМ ПЗС, определяемую диффузией заряда ПЗС-матрицы в направлении считывания, можно принять за единицу.
Очевидно, что передаточная функция всего прибора равна:
![]() (29)
(29)
· Рассчитаем воспринимаемое отношение сигнал/шум:
 (30)
(30)
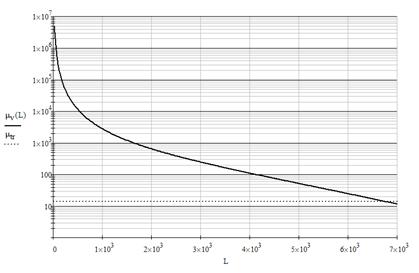
Рис. 4. Зависимость воспринимаемого отношения сигнал/шум от дальности распознавания цели №1.
· Рассчитаем требуемое отношение сигнал/шум.
Согласно критерию Неймана-Пирсона[2]:
![]() , где (31)
, где (31)
Pлт = 0.05 – вероятность ложной тревоги,
Pобн = 0.95 – вероятность правильного обнаружения,
u = Lp-1(v) – обратная функция Лапласа, т.е. аргумент u функции Лапласа v = Lp(u) при значении самой функции, равном v.
Подставив значения, получим: ![]() = 13.68
= 13.68
Таким образом Lрасп = 6772 [м].
Расчет дальности распознавания для цели №2.
Аналогичен расчету для цели №1, но с изменением одной из зависимостей (17). Поверхность фона в данном случае практически параллельна оси распространения излучения лазера, поэтому отражением этого излучения от фона можно пренебречь.
![]() (32)
(32)
В результате получим Lрасп = 6704 [м].
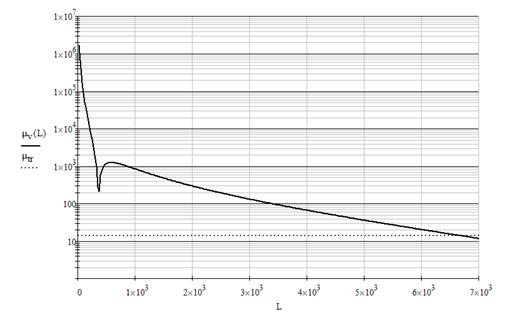
Рис. 5. Зависимость воспринимаемого отношения сигнал/шум от дальности распознавания цели №2.
Дальность распознавания объекта дневной ПЗС-камерой.
Данные для расчёта:
1) Входной объектив.
Фокусное расстояние Fob = 600 мм.
Дальность распознавания не менее 6700 м.
Интегральный коэффициент пропускания в рабочем диапазоне: Kob = 0,82.
Предположим, что для достижения необходимой дальности распознавания достаточно будет иметь диаметр входного зрачка, удовлятворяющий условию параксиальной системы (D : f’ = 1 : 10). Тогда DДТВ = 60 мм.
ФПМ дифракционно ограниченной системы определяется как[2]:
 , где(33)
, где(33)
![]() [мм-1].
[мм-1].
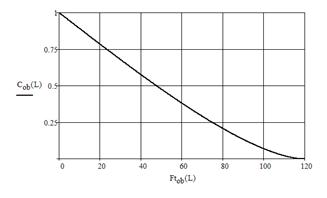
Рис. 6. Функция передачи модуляции входного объектива дневного канала.
2) ПЗС матрица
Помимо указанных в предыдущем разделе параметров, необходима относительная спектральная чувствительность ПЗС-матрицы:
3) Фоноцелевая обстановка отличается от описанной в разделе 2.2.2.1 уровнем освещённости Земной поверхности: Ev = 104 лк.
· Рассчитаем спектральную яркость объекта и фона:
Аналогично п. 2.2.2.1, но относительная спектральная яркость источника (Солнце) описывается исходя из соотношения Планка для АЧТ, нагретого до температуры 5217 К.
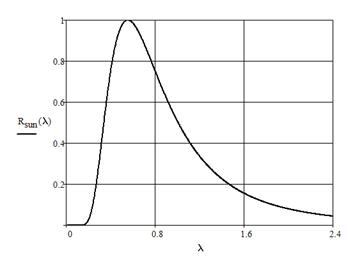
Рис. 7. Относительная спектральная яркость Солнца.
· ![]() - число электронов, полученное от фотокатода за время
- число электронов, полученное от фотокатода за время ![]()
![]() (постоянная времени глаза) при облучении от зон миры, соответствующих объекту и фону:
(постоянная времени глаза) при облучении от зон миры, соответствующих объекту и фону:
![]()
![]() (34),
(34),
Где
- максимум спектральной чувствительности приёмника.
· Число темновых электронов, получаемое от одной чувствительной площадки ПЗС-матрицы за время ![]() :
:
Расчёт совпадает с приведённым в разделе 2.2.2.1.
Сквозная передаточная функция дневного канала.
1. Функция передачи модуляции объектива.
Пространственная частота для объектива находится так же, как и в разделе 2.2.2.1.
График ФПМ объектива приведен на рис.14.
2. Геометрическая ФПМ ПЗС-матрицы.
Пространственная частота для ПЗС матрицы в данном случае совпадает с пространственной частотой объектива. Геометрическая ФПМ ПЗС-матрицы приведена на рис. 10.
3. ФПМ растекания заряда ПЗС матрицы.
Приведена на рис.11.
Очевидно, сквозная передаточная функция прибора:
![]() (35)
(35)
Найдём отношение сигнал/шум:
 (36)
(36)
Требуемое отношение сигнал/шум – аналогично разделу 2.2.
Таким образом получим для цели №1 Lрасп = 10800 [м].
Для цели №2 Lрасп = 15500 [м].
2.3 Аберрационный расчет объектива НУТВ
Коррекция двухзеркальной системы
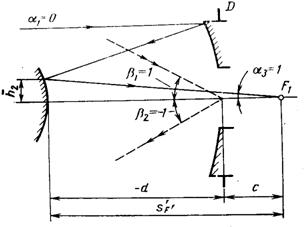
Рис. 8. Оптическая схема двухзеркального объектива
Принципиальная схема двухзеркалькой системы[6] показана на рис. 18. Расстояние с от вершины большого зеркала до плоскости изображения обычно оговаривается в технических условиях на расчет системы и зависит от конкретного назначения объектива. Будем считать, что центр входного зрачка совпадает с вершиной большого зеркала.
Для вспомогательных лучей примем следующие условия нормировки: α1 = 0; h1 = 1; α3 =1; β1 = 1; Н1 = 0; β2 = -1. Отрезки -d, с и S’f’ на рис. 18 приведены к фокусному расстоянию, равному единице.
Видно, что двухзеркальная система имеет два свободных параметра (α2 и d), которые следует выбирать с учетом габаритных условий.
Для расширения коррекционных возможностей рассмотренной системы используют различные линзовые компенсаторы или деформируют поверхности зеркал, делая их несферическими.
Компенсация сферической аберрации. Определение коррекционных параметров
Линза поз. 1 (см. оптическую схему принципиальную) имеет отрицательную сферическую аберрацию, так же как и главное зеркало поз. 2, если его изготовить с наружной отражающей поверхностью ("собирающие элементы"). Известно [6], что отрицательная линза имеет положительную сферическую аберрацию. Поэтому комбинация положительной линзы, имеющей отрицательную сферическую аберрацию, с отрицательной линзой позволяет получить систему с исправленной сферической аберрацией. К сожалению, устранить сферическую аберрацию можно только для некоторых лучей, но нельзя ее полностью исправить в пределах всего входного зрачка.
Исходя из вышесказанного, выполним главное зеркало в виде зеркала с внутренней отражающей поверхностью (т.н. зеркало Манжена). Тогда преломляющая поверхность и ее отражение в развертке хода лучей образуют отрицательную линзу. Это обеспечит нам один корректирующий параметр (при фиксированной толщине) – радиус преломляющей поверхности зеркала.
Компенсация комы. Определение коррекционных параметров
Рассмотрим компенсатор, состоящей из линзы, расположенной в сходящихся пучках лучей (линза поз. 4 на оптической схеме).
При фиксированной оптической силе и толщине компенсатор имеет один свободный параметр (радиус одной из поверхностей). При определении конструктивных параметров компенсатора следует иметь ввиду, что его коррекционные возможности зависят от положения компенсатора относительно плоскости малого зеркала. Если компенсатор располагать ближе к малому зеркалу, то он сильнее будет влиять на сферическую аберрацию системы, если компенсатор приближать к задней фокальной плоскости, то возрастает его влияние на полевые аберрации.
Применение компенсатора целесообразно при относительных отверстиях до 1 : 5, что соответствует данному случаю.
Расчет конструктивных параметров
Рассчитаем конструктивные параметры оптической системы методом проб[6]. Метод проб состоит в исследовании и использовании зависимостей между изменениями отдельных параметров оптической схемы с известной конструкцией и вызываемыми ими изменениями значений аберраций.
Первоначально из каталогов, архивных данных или патентов выбирают наиболее подходящую оптическую систему, которую пересчитывают, если это необходимо, на требуемое фокусное расстояние или увеличение и принимают за исходную. Последовательно изменяя значения отдельных параметров исходной системы, получают конечный ряд вариантов оптической системы. Рассчитывают ход ряда лучей осевого и наклонного пучков через оптическую систему каждого из полученных вариантов, вычисляют аберрации и, сравнивая их с аберрациями исходной системы, находят указанные выше зависимости. Результаты исследований анализируют по таблицам или графикам, иллюстрирующим влияние изменений параметров на аберрации и другие величины, характеризующие свойства оптической системы. Путем интерполяции или экстраполяции по таблицам или графикам находят вариант оптической системы, который удовлетворяет техническому заданию. В качестве изменяемых параметров могут быть взяты конструктивные параметры (r, d, n). Очевидно, что метод проб достаточно трудоемок по времени, так как требуется проводить большое количество расчетов хода лучей через систему. Однако интенсивное развитие ЭВМ в последние годы позволяет сделать это в автоматическом режиме.
Исходная система:
Исходной системой является объектив, разработанный на ОАО "НПО Геофизика-НВ". Он не удовлетворяет требованиям к качеству изображения и результатам габаритного расчета. Имеет следующие характеристики:
· Заднее фокусное расстояние 270 мм.
· Диаметр входного зрачка 200 мм, диаметр экранированной части 100 мм.
· Угловое поле 5,3°.
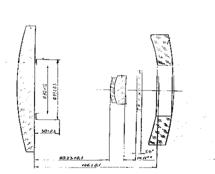
Рис. 9. Оптическая схема исходного объектива.
Конструктивные параметры объектива:
| Номер поверхности (по ходу лучей) | Радиус, мм | Толщина по оси, мм | Материал |
| 1 | 656,10 | ||
| 21 | К8 | ||
| 2 | ∞ | ||
| 146,01 | воздух | ||
| 3 | -364,13 | ||
| 18 | К8 | ||
| 4 | -570,2 | Зеркало | |
| -18 | К8 | ||
| 5 | -364,13 | ||
| -146,01 | воздух | ||
| 6 | ∞ | Зеркало | |
| 90,23 | воздух | ||
| 7 | 88,92 | ||
| 5 | ТФ5 | ||
| 8 | 69,02 | ||
| 13,4 | ТК14 | ||
| 9 | 625,2 |
Опишем поэтапно расчет конструктивных параметров при помощи САПР Zemax (в диалоговом режиме).
1) Моделирование исходной оптической системы.
2) Масштабирование всей системы с целью получения искомого фокусного расстояния (1307 мм).
3) Задание искомого диаметра входного зрачка (250 мм).
4) Задание искомого размера изображения (18 мм).
5) Приведение коррекционных элементов к виду, описанному в п. 2.3.1, 2.3.2.
6) Задание оптимизационных требований и ограничений:
o Минимизация размера усредненного (по зрачку и по длинам волн) кружка рассеяния, содержащего 70% энергии.
o Максимальная длина оптической системы, максимальное отношение светового диаметра компонент к их толщине, минимальное расстояние между компонентами, допустимость отклонения от заданного фокусного расстояния.
7) Назначение коррекционных параметров соответственно с п. 2.3.1, 2.3.2.
8) Автоматизированный расчет.
С результатами аберрационного расчета объектива НУТВ и объектива можно ознакомиться в приложении 1.
С конструктивными параметрами объектива ДТВ, его МПФ, и конструктивными параметрами коллиматора ЛОС можно ознакомиться в приложении 2.
Вывод
· Приведено обоснование оптической схемы КТВС.
· Проведен габаритный расчет, который, к сожалению, показывает, что одновременное соблюдение требований ТЗ по габаритам и угловому полю не представляется возможным.
· Проведен расчет сквозной передаточной функции системы. Проведен расчет дальности действия, на основании которого выбрано число лазеров в ЛОС. Расчет показал, что дальность распознавания для ночного канала составляет 6700 м, для дневного – 11000 м.
· Проведен аберрационный расчет, в результате которого были получены конструктивные параметры оптических схем КТВС.
3. Конструкторская часть
Похожие работы
... и материалов, проведением монтажных и пусконаладочных работ. Сметный расчёт стоимости данных затрат приведён в приложениях. Таблица 5.1 – Расходы на проектирование, закупку оборудования и материалов и производство работ по системе охранной сигнализации пожаре. Наименование статей затрат Стоимость в текущих ценах, руб. Оборудование 833 915 Материалы 347 930 Монтажные работы 3213388 ...
... с определенной частотой. В таких условиях постоянное наблюдение невозможно. 3. Технические решения по модернизации системы видеонаблюдения Существующая в рассматриваемом коммерческом система видеонаблюдения имеет ряд недоработок. В целях ее усовершенствования для полного соответствия целям банка в сфере видеонаблюдения разработан комплекс мер заключающийся в следующем: 1. Замена ...
... эта система будет неполной без интегрирования с ней системы видеонаблюдения, которая обеспечит визуальный просмотр времени и попыток несанкционированного доступа к информации и обеспечит идентификацию личности нарушителя. 2.4 Разработка системы видеонаблюдения объекта защиты Целевыми задачами видеоконтроля объекта защиты является: 1) обнаружение: - общее наблюдение за обстановкой; - ...
... ГУ-23 с описанием повреждения и не снимать с ответственного простоя до выяснения обстоятельств повреждения вагона грузополучателем. 2. Организация работы системы «Парк приема-горка» 2.1 Технология обработки поездов в парке приема При подходе поезда дежурный по станции, предварительно согласовав с маневровым диспетчером парк и путь приема, извещает работников станции по громкоговорящей ...
0 комментариев