Навигация
Проект гелеоисточника для энергохозяйства
80013
знаков
23
таблицы
30
изображений
Аннотация
Целью данного дипломного проекта являлась идея получения более дешевого и экологичного вида энергии на основе преобразования солнечной. Задача дипломного проекта состояла в проектировке гелеоисточника для энергохозяйства промышленного или жилого загородного объекта мощностью 30 кВт. Необходимо было спроектировать силовую часть и систему управления гелеоисточником. В этой части дипломного проекта была спроектирована система управления гелеоисточником. Были проанализированы различные способы регулирования выходного напряжения автономного инвертора с использованием современных микроконтроллеров и выбран наиболее приемлемы. Был спроектирован блок питания для системы управления, разведена печатная плата. Освещены вопросы техники безопасности.
Содержание
Введение
1. Обзор способов регулирования выходных параметров инвертора напряжения
2. Разработка системы управления
2.1 Описание схемы управления
2.2 Расчет элементов схемы системы управления
3. Безопасность и экологичность при изготовлении, ремонте и обслуживании гелиогенератора 3.1 Описание рабочего места, оборудования и выполняемых технологических операций3.2 Идентификация опасных и вредных производственных факторов
3.3 Организационно технические мероприятия по созданию безопасных условий труда при ремонте
3.4 Расчет защиты от грозовых перенапряжений
3.5 Обеспечение пожарной безопасности на рабочем участке3.6 Экологическая экспертиза разрабатываемого проекта
3.7 Безопасность объекта при аварийных и чрезвычайных ситуациях
Заключение Список литературыВведение
В настоящее время во всем мире в связи с бурным развитием электротехники и электроники постоянно растет количество электроприборов и конечно количество потребляемой электрической энергии. Рыночная экономика диктует свои условия на рынке энергии, с увеличением спроса на электрическую энергию цена на нее возрастает. Источником энергии добываемой человеком, как правило, служит вода (гидроэлектростанции), энергия земли (геотермальные электростанции), энергия атома (атомные электростанции) и др. Все эти виды получения электроэнергии как правило наносят непоправимый вред окружающей природе. Современный способ получения электрической энергии должен удовлетворять диктуемым современностью требованиям о экологичности, относительной дешевизне получаемой энергии. Не так давно человеком было придумано использовать для получения электричества энергию солнца (гелеоэнергия). Использование данного способа позволяет получить электроэнергию не нанося вред окружающей среде, однако элементы преобразующие солнечную энергию в электрическую дороги и имеют низкий КПД. На настоящий момент стоимость элемента, дающего около 130 Вт с 1 м2,с КПД 15% достигает 200 долларов. Не так давно стали появляться солнечные элементы с более высоким КПД (25%), их цена значительно выше.
Целью дипломного проекта является получение дешевого, и экологичного вида электрической энергии, используя энергию солнца в качестве источника, при больших капитальных затратах. Задачей дипломного проекта является разработка системы управления, выбор метода регулирования выходных параметров автономного инвертора, гелеоисточника для энергохозяйства промышленного или жилого загородного объекта мощностью 30 кВт. Проектировка конструкции печатной платы системы управления, а также разработка блока питания для системы управления.
1. Обзор способов регулирования выходных параметров инвертора напряжения
Инвертированием в силовой электронике называют процесс преобразования постоянного напряжения в переменное. Устройства, осуществляющие такое преобразование, называются инверторами. Различают два типа инверторов:
- зависимые инверторы или инверторы, ведомые сетью;
- независимые или автономные инверторы.
Зависимый инвертор работает при наличии в его выходной цепи источника переменного напряжения, который задает форму, частоту и величину напряжения образованной им сети переменного напряжения. В этой сети могут находиться потребители переменного тока, и задача зависимого (от этой сети) инвертора сводится к поставке в нее недостающей или дополнительной активной мощности.
Автономный инвертор может работать при отсутствии на его выходе каких-либо источников переменного напряжения. При этом частота выходного напряжения автономного инвертора определяется частотой импульсов управления вентилями инвертора, а форма и величина выходного напряжения – характером, величиной нагрузки и его схемой.
Различают три типа автономных инверторов: 1) инверторы тока; 2) резонансные инверторы; 3) инверторы напряжения.
Наиболее широкие возможности и области применения у инвертора напряжения. Мы называем его лучшим универсальным модулем преобразования электрической энергии. Помимо основной функции преобразования постоянного тока в переменный он может в обращенном режиме выполнять обратную функцию, т.е. преобразование переменного напряжения в постоянное. Кроме того, при нулевой частоте выходного напряжения он превращается в реверсивный преобразователь постоянного напряжения в постоянное. На его основе выполняются активные фильтры напряжения и тока, компенсаторы реактивной мощности, регуляторы переменного напряжения, непосредственные преобразователи частоты, т.е. ячейка инвертора напряжения является источником новых схем.
Автономный инвертор напряжения как преобразователь постоянного входного напряжения в переменное выходное напряжение отличается от автономного инвертора тока тем, что получает питание от источника напряжения безындуктивного характера [16].
Uвых = Yп·Uвх, iвых = Yп·iвх (1.1)
где Yп – коммутационная функция вентильного комплекта есть переменная единичная функция (без постоянной составляющей), определяющая форму выходного напряжения инвертора, для простейшей формы коммутационной функции – меандра.
Как видно из второго уравнения, входной ток инвертора будет импульсным (со скачком тока), что не допускает присутствия во входном источнике индуктивности. Реальные источники входного напряжения (чаще всего выпрямители), как правило, обладают индуктивностью L (если это не аккумуляторы). Для устранения ее влияния на входе инвертора напряжения включается фильтровый конденсатор Сф достаточной емкости, что является первой особенностью инвертора напряжения. Через него замыкаются, минуя входной источник, импульсы входного тока инвертора, как это видно из временных диаграмм на рис. 1.1.
Вторая особенность инвертора напряжения также видна из второго уравнения (1.1) и связана с тем, что входной ток iвх может принимать отрицательные значения при большом сдвиге фазы выходного тока инвертора iвых относительно коммутационной функции Yп (т.е. выходного напряжения). Для этого необходимо наличие двусторонней проводимости у ключей вентильного комплекта инвертора, т.е. ключи должны быть выполнены с полным управлением (транзисторах, GTO‑тиристорах), шунтированных вентилями обратного тока. [16]
Временные диаграммы инвертора напряжения.
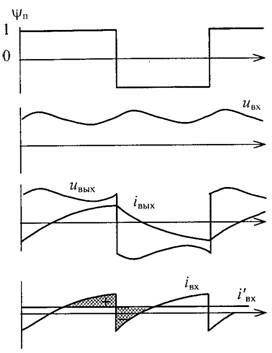
Рисунок 1.1
Форма выходного напряжения инвертора определяется в соответствии с соотношением (1.1.) видом коммутационной функции вентильного коммутатора Yп. Основные виды этих функций, формирующие прямоугольное выходное напряжение инвертора по «гладкой составляющей» (показана пунктиром), приведены на рис. 1.2.
Под гладкой составляющей периодической импульсной функции в силовой электронике принято понимать функцию, образованную непрерывной аппроксимацией средних значений (на интервале такта Тт коммутаций в преобразователе) мгновенной кривой напряжения или тока. Тогда гладкая составляющая первой коммутационной функции на рис. 1.2 есть нерегулируемый прямоугольник, а составляющие второй и третьей коммутационных функций – регулируемые по величине прямоугольные напряжения (за счет широтного и широтно-импулъсного регулирования соответственно). Последний способ формирования кривой выходного напряжения, называемый «120‑градусным управлением» в отличие от предшествующего рассмотренного 180 – градусного управления, используется для исключения гармоник, кратных трем, особенно неблагоприятных для такой типовой нагрузки как асинхронные двигатели.
Для оценки качества выходного напряжения инвертора при регулировании найдем спектры этих напряжений. Действующее значение k‑й гармоники напряжения инвертора при широтном регулировании будет равно в долях входного напряжения [16]:
|

где tи* = 2tи / Т – относительная длительность импульса в полупериоде выходного напряжения.
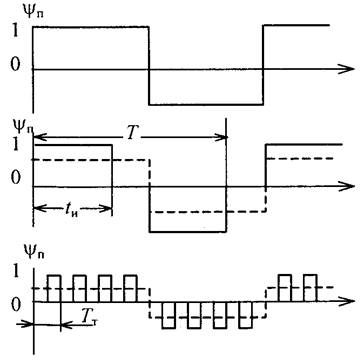
Рисунок 1.2
Виды функций формирующих выходное напряжение инвертора.
Из (1.1.) можно выразить доли высших гармоник напряжения по сравнению с первой как (1.3.) [16]:
![]()
|
На рис. 1.3. построены зависимости первой гармоники по (1.2.) и высших гармоник по (1.3.) от относительной длительности импульса напряжения, которую можно назвать глубиной модуляции напряжения по управлению, меняющейся от 0 до 1. Присутствуют только нечетные гармоники, наибольшая из которых – третья – при tи* =2/3 исчезает. Но уже при tи*=1/3 третья гармоника почти сравнивается с первой. Поэтому широтное регулирование может применяться только в малом диапазоне изменения tи* для целей стабилизации выходного напряжения. К тому же зависимость первой гармоники от глубины регулирования нелинейна.
Для улучшения спектра выходного напряжения инвертора используют широтно-импульсное регулирование на несущей частоте токов, значительно превышающей (в число раз, называемое кратностью частоты коммутации – КТ) частоту выходного напряжения инвертора (последняя диаграмма на рис. 1.2.). Это смещает гармоники напряжения, обусловленные регулированием, в область более высоких частот, что облегчает их фильтрацию в нагрузке [16].
Дальнейшее улучшение спектра выходного напряжения инвертора обеспечивается при модуляции длительностей импульсов по синусоидальному закону, как показано на рис. 1.4. для однополярной (а) и двухполярной (б). Непрерывная кривая – гладкая составляющая (выходного напряжения) коммутационной функции.
Принята следующая классификация видов широтно-импульсной модуляции.
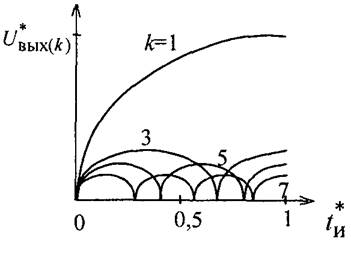
Рисунок 1.3
Зависимость первой и высших гармоник от относительной длительности импульса напряжения.
Модуляция длительности импульсов по синусоидальному закону.
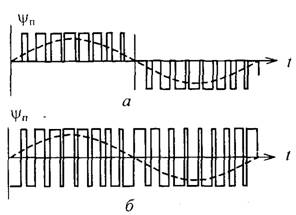
Рис. 1.4. а – однополярная; б – двухполярная;
1. По модулируемому параметру различают одностороннюю и двухстороннюю широтно-импульсную модуляцию. При односторонней модулируется положение переднего или заднего фронтов импульсов, при этом соответственно задний и передний фронты импульсов следуют с неизменной тактовой частотой. При двусторонней модуляции в пределах такта изменяется положение обоих фронтов импульсов.
2. По отношению периода модулирующего сигнала к периоду тактов импульсной последовательности, т.е. по кратности частоты коммутации, различают ШИМ с целочисленной кратностью, рассмотренную выше, ШИМ с кратностью, выражаемой дробным рациональным числом, и ШИМ с кратностью, выражаемой иррациональным числом. При дробно-рациональной кратности период повторения модулированной последовательности импульсов, формирующих выходное напряжение инвертора, определится как такой наибольший период выходного напряжения, в котором укладывается целое число периодов модулирующего сигнала и периодов тактов. Этот период задает период нижней субгармоники в кривой выходного напряжения, т.е. гармоники с частотой ниже частоты модулирующего сигнала, которой определяется частота основной гармоники выходного напряжения.
3. По числу полярностей импульсов на длительности такта различают двухполярную модуляцию, когда такт образован совокупностью импульса положительной и отрицательной полярности (вторая диаграмма на рис. 1.4.), однополярную модуляцию, когда такт образуется импульсом одной полярности и паузой (первая диаграмма), и квазиоднополярную модуляцию, когда после импульсов одной полярности, приближающихся по длительности к предельно минимальной длительности, допустимой при практической реализации, следуют импульсы другой полярности неизменной длительности, равной предельно минимальной. Квазиоднополярная модуляция позволяет воспроизвести при широтно-импульсной модуляции сколь угодно малые величины выходного напряжения инвертора при наличии практических ограничений на минимальное время между коммутацией у реальных вентилей.
4. По форме модулирующего сигнала, задающего закон изменения длительностей импульсов на такте, а значит, и форму гладкой составляющей выходного напряжения, различают синусоидальный, треугольный, трапецеидальный, прямоугольный законы модуляции.
5. По способу однозначного определения конкретной длительности импульса на такте в функции непрерывного модулирующего сигнала различают ШИМ первого рода, когда длительность импульса зависит от значения модулирующего сигнала в некоторые фиксированные моменты времени, например в моменты начала импульса, ШИМ второго рода, когда длительность импульса обусловлена значением модулирующего сигнала в момент окончания модулируемого по длительности импульса, и ШИМ третьего и четвертого родов, когда длительность импульса определяется некоторой функциональной зависимостью от значения модулирующего сигнала в некоторой промежуточной точке на интервале импульса.
6. По числу уровней модуля обобщенного вектора напряжения трехфазного инвертора различают одноуровневые алгоритмы управления, реализуемые в классических трехфазных мостовых схемах инверторов, и многоуровневые алгоритмы управления, реализуемые в модифицированных схемах трехфазных инверторов.
Для оценки качества выходного напряжения инвертора при синусоидальной широтно-импульсной модуляции необходимо знать спектры напряжения. Теория спектров широтно-модулированных последовательностей импульсов первоначально получила развитие в радиотехнике, где исследовалась возможность построения мощных усилителей сигналов, работающих в режиме переключения модуляции, а также в теории связи, где изучалась возможность использования ШИМ для помехоустойчивой передачи сообщений. Был разработан эффективный метод нахождения спектров напряжений при широтно-импульсной модуляции, названный методом временной деформации. Технология применения этого метода достаточно проста. Сначала находят спектр немодулированной последовательности прямоугольных (или любой другой формы) импульсов. Затем в выражение для полученного спектра подставляют вместо регулируемого параметра (момента фронта импульса, длительности импульса) его принятый закон изменения во времени (закон модуляции). Полученное выражение приводят к виду, удобному для применения.
Таким образом, можно показать, что спектр напряжения при синусоидальной широтно-импульсной модуляции второго рода содержит помимо первой высшие гармоники, частоты которых [16]:
![]() (1.4)
(1.4)
где к, l – равны целым числам.
При двухсторонней ШИМ в трехфазном инверторе в фазном напряжении инвертора (рис 1.6.) будут присутствовать только гармоники порядка п = kKТ ±l, где КT – кратность частоты коммутации, а k не кратно трем и отсутствуют комбинации, состоящие из двух нечетных либо четных чисел т и l рис. 1.5.
Реализация двухполярной ШИМ возможна в любой базовой схеме однофазного инвертора, а однополярная – только в полумостовой с нулевыми вентилями и мостовой схемах. Все эти схемы инверторов, выполненных на реальных вентилях, имеют общий недостаток, связанный с конечным временем выключения вентилей. При этом из вновь включаемого вентиля и выключаемого вентиля (транзистора) на время его выключения образуется цепь короткого замыкания источника входного напряжения и через транзисторы текут короткие импульсы больших сквозных токов, которые увеличивают потери и, если их не ограничить, в состоянии вывести транзисторы из строя. Поэтому в реальных системах между моментом запирания одного транзистора плеча моста и полумоста и моментом отпирания другого транзистора этого же плеча вводится «мертвая пауза», обычно порядка одной микросекунды [16].
Зависимость фазного напряжения трехфазного инвертора от высших гармоник.
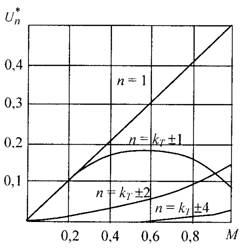
Рисунок 1.5. Двухсторонний ШИМ в трехфазном инверторе
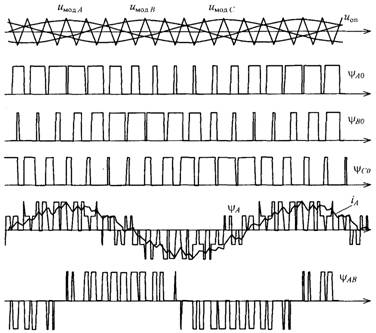
Рисунок 1.6 Индексная табличная ШИМ в автономном инверторе напряжения
В настоящее время массовым и перспективным стал автономный инвертор напряжения (АИН) с широтно-импульсной модуляцией (ШИМ).
В общем случае все виды ШИМ основаны на изменении длительности импульсов равной амплитуды, следующих через равные интервалы времени в соответствии с принятым законом формирования напряжения. Законы формирования, общие для любого метода модуляции, определяются функцией построения (модулирующим сигналом). На основании литературных данных целесообразно распределить разновидности ШИМ по степеням соответствия параметров импульсов значениям модулирующего сигнала согласно основным признакам (рис. 1.7). [4]
Следует отметить, что в связи с развитием методов формирования синусоидальных напряжений, трапецеидальная ШИМ уже почти вытеснена синусоидальной. Двуполярная ШИМ характеризуется постоянным действующим значением выходного напряжения, поэтому регулирование значения основной гармоники сопровождается перераспределением энергии в спектре. Однополярная ШИМ дает лучший гармонический состав, действующие значения напряжения при этом меньше, чем в двуполярном варианте.
Современные преобразователи строятся с использованием микроконтроллеров (МК), с помощью которых реализуется и ШИМ. В связи с этим вводится новый термин – тактовая частота ШИМ Fт, которая определяется точностью аппроксимации несущего Fн и модулирующего Fм сигналов. Как правило, соотношения между ними выбираются следующими:
Fн = n3Fм (n=2, 3, 4,…) и Fт = m2Fн (m=3,4,5,…) (1.5)
Классификация видов ШИМ.
Реализация ШИМ на МК возможна двумя способами: традиционный (формирование выходных напряжений осуществляется в результате постоянного сравнения модулирующего и несущего сигналов) и табличный (полностью рассчитывается заранее и заносится в ПЗУ, из которого затем считывается).
При реализации ШИМ традиционным способом приходится использовать либо универсальные мощные микроконтроллеры, либо специализированные, относительно дорогие контроллеры. Реализация сложных алгоритмов ШИМ традиционным способом затруднена на универсальных МК большим объемом программы, а на специализированных – возможностями архитектуры конкретного типа МК. Специализированные МК, имеющие аппаратную поддержку ШИМ выпускаются такими фирмами как MOTOROLA, TEXAS INSTRUMENTS, и другими [5].
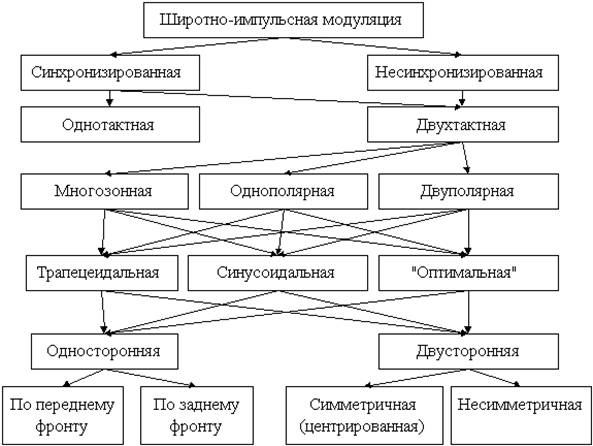
Рисунок 1.7
ШИМ – генераторы МК этого типа имеют от двух до шести независимых каналов и управляются несколькими программно доступными регистрами. ШИМ – генераторы позволяют реализовывать синхронизацию каналов, формирование «мертвого» времени, его компенсацию, выравнивание импульсов по фронту или по центру, встроенные защиты от неисправностей, некоторые другие функции. Частоту несущего сигнала можно регулировать от 8 МГц до 125 Гц. В последнее время вместо встроенных ШИМ – генераторов микроконтроллеры оснащаются более универсальными средствами, которые, в том числе, реализуют и алгоритмы ШИМ. В контроллерах MOTOROLA это так называемый таймерный сопроцессор TPU (Timer Processor Unit). Имеется в виду многоканальный таймер с очень гибкой схемой управления, полуавтономной от ядра контроллера. Программирование TPU осуществляется либо полностью, либо с использованием стандартных подпрограмм, в числе которых имеется и ШИМ с аналогичными указанным выше параметрами. Все перечисленные МК ориентированы на реализацию двуполярной ШИМ которая, как указывалось, не позволяет получить наилучший гармонический состав выходного напряжения. [6]
Достоинства табличного способа заключаются в том, что он позволяет реализовать любые алгоритмы ШИМ с высокой несущей частотой с помощью микроконтроллеров, весьма бедных в функциональном отношении. Тем не менее, этот способ не нашел широкого применения из-за следующих причин.
Обычно табличная ШИМ подразумевает поочередное считывание с частотой Fт того из массивов ПЗУ, который в настоящий момент соответствует заданным выходным параметрам. В результате, для реализации такой табличной ШИМ необходимо не менее 64 кБ (Fмmax = 60 Гц; диапазон регулирования (0.5–120)% дискретность регулирования примерно 0.5%). Этим практически исчерпываются возможности дешевых 8‑разрядных МК. [6]
Еще одна трудность – плавное регулирование тактовой частоты ШИМ при изменении частоты модулирующего сигнала. Здесь, как правило, применяется управляемый напряжением генератор, либо целочисленный 16‑разрядный предварительный делитель, сигнал с которого вводится в МК.
Предлагается новый способ табличной реализации ШИМ, свободный от указанных недостатков – «индексная» табличная ШИМ, которая реализуется по следующим принципам.
Сначала составляется нумерованный массив с допустимыми сочетаниями состояний вентилей АИН. Назовем его массивом состояний. Затем обычным способом рассчитываются массивы для всех частот модулирующего сигнала. После этого в каждом массиве, соответствующем конкретной частоте Fм, сохраняются только строки (с сохранением исходной нумерации), в которых происходит переключение, все остальные строки удаляются. Из этих «сокращенных» массивов составляются индексные массивы, которые содержат номера шагов (периода тактовой частоты ШИМ на периоде модулирующего сигнала), на которых происходят переключения и соответствующий индекс массива состояний. Индексные массивы и массив состояний записываются в ПЗУ, после чего ШИМ осуществляется обычным способом.
Алгоритм работы предлагаемой ШИМ приведен на рис. 1.8.
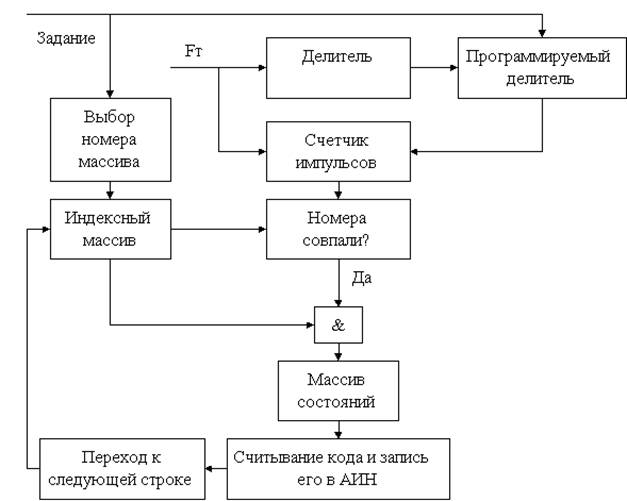 Рисунок 1.8. Алгоритм работы индексной ШИМ
Рисунок 1.8. Алгоритм работы индексной ШИМ
Индексно-табличная реализация ШИМ требует существенно меньшего объема памяти, чем традиционная. Например, для получения указанных выше параметров (Fмmax = 60 Гц; диапазон регулирования (0.5–120)% дискретность регулирования примерно 0.5%) индексная ШИМ требует менее 11 кБ. Экономия объема памяти позволяет довести соотношение Fт/Fн до 40 (тактовая частота ШИМ Fт примерно 48кГц) и, тем самым, увеличить точность аппроксимации несущего и модулирующего сигнала не менее, чем в 4 раза. [7]
Таким образом, предлагаемая индексно – табличная ШИМ позволяет получить высокие показатели АИН, используя дешевые 8‑разрядные микроконтроллеры. Тем более, все резервы этого класса МК еще не использованы, т. к. выпускаемые сейчас высокоскоростные модификации МК семейства MCS‑51 (например, 80C3x0 фирмы DALLAS SEMICONDUCTOR) работают в 8.25 раза быстрее младших моделей этого семейства (КР1830ВЕ31).
0 комментариев