Условия самовозбуждения
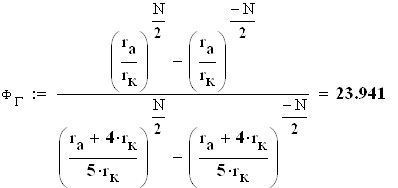
К.П.Д. магнетрона
Рабочие и нагрузочные характеристики магнетронов
Конструирования магнетронов
ТЕХНИЧЕСКАЯ ЧАСТЬ
Режимы работы радиолокатора "Гроза"
Основной приёмно-передающий блок
ОСНОВНЫЕ ПОЛОЖЕНИЯ ТЕОРИИ БЕЗОПАСНОСТИ ПОЛЕТОВ
Составление оптимального алгоритма поиска места отказа
Совокупность ДП и алгоритмов диагностирования
Издержки на оплату услуг сторонних организаций
Инвестиции, необходимые для реализации проекта (Invest)
Срок окупаемости инвестиций (tok)
Индекс доходности (ИД)
Навигация
Режимы работы радиолокатора "Гроза"
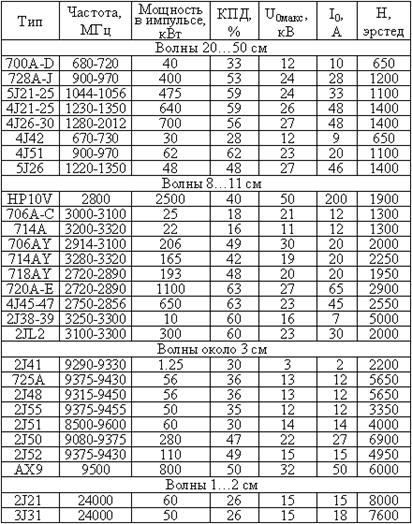
Применение магнетронных генераторов большей мощности в радиолокационных системах
146279
знаков
15
таблиц
39
изображений
2.4 Режимы работы радиолокатора "Гроза"
В соответствии с тактическим назначением РЛС "Гроза" может эксплуатироваться в следующих режимах: "Земля", "Метео", "Контур", "Снос", "Коррекция".
Режим работы "Земля"
Изображение местности на экране индикатора в режиме "Земля" получается в результате различных значений эффективной отражающей поверхности наземных объектов, что приводит к различию амплитуд отражённых сигналов, поступающих на вход приёмника РЛС.
В свою очередь различие амплитуд сигналов вызывает различную яркость свечения отдельных элементов экрана, что позволяет судить о характере облучаемых объектов (рис. 2.1).
Для получения изображения местности антенна РЛС в режиме "Земля" имеет веерный луч - широкий в вертикальной плоскости и узкий (4°,2) в горизонтальной плоскости.
При работе РЛС в режиме "Земля" обеспечивается получение на индикаторе в полярных координатах "азимут-дальность" непрерывной радиолокационной карты земной поверхности в пределах азимутальных углов ±100° впереди самолёта. Экран индикатора имеет время послесвечения несколько большее времени цикла качания антенны РЛС, что и позволяет наблюдать летчику общую картину просматриваемой местности. В нижней части рис.2.1 приведён участок такого изображения (условно - в негативе). Выше приведены временные диаграммы с характером изменения напряжения UВУ- на выходе видеоусилителя и форма тока в отклоняющей катушке, обеспечивающая развёртку электронного луча по дальности.

Рисунок 2.1 – Принцип получения радиолокационного изображения на индикаторе кругового обзора
Первые отражённые сигналы приходят с дальности, равной высоте полёта, поэтому около центра экрана образуется тёмное пятно с радиусом, пропорциональным высоте полёта самолёта. Затем экран засвечивается сигналом, отражённым от различных объектов. От спокойной водной поверхности происходит зеркальное отражение и участок экрана, ей соответствующий, остаётся незасвеченным (тёмным). В связи с этим на тёмном фоне хорошо видны отражения кораблей, мостов и других надводных объектов. Искусственные сооружения создают достаточно интенсивные отражённые сигналы и их изображение также выделяется на фоне местности.
Для правильности воспроизведения обстановки на индикаторе необходимо, чтобы одинаковые объекты давали на экране одинаковую яркость засвета независимо от различия расстояний до каждого из них. При этом, в соответствии с основным уравнением дальности действия РЛС, должно выполняться условие
 (2.1)
(2.1)
где Рпрм - мощность отражённых сигналов на входе приёмника;
G(q) - коэффициент усиления (по мощности) антенны РЛС вертикальной плоскости;
R - дальность до объектов.
Для выполнения этого условия необходимо выбрать особый закон изменения диаграммы направленности от текущего угла qi (рис. 1).
При постоянной высоте полета Н
![]() \
\
Как следует из условия (2.1) ![]() , откуда
, откуда ![]() , т.е. коэффициент усиления антенны в вертикальной плоскости должен изменяться по закону
, т.е. коэффициент усиления антенны в вертикальной плоскости должен изменяться по закону ![]() . На рис.2.1 показана примерная форма такой диаграммы, называемой "косекансной".
. На рис.2.1 показана примерная форма такой диаграммы, называемой "косекансной".
При работе РЛС на развёртках "30", "50" и "125" обзор земной поверхности осуществляется косекансной веерной диаграммой направленности. Для получения такой диаграммы в этом режиме используется антенный отражатель (рефлектор) двойной кривизны.
При масштабе развёртки 250 км для обзора земной поверхности, в целях повышения дальностей наблюдения средних промышленных центров, используются поочерёдно два вида диаграмм направленности, переключаемых автоматически. При движении рефлектора вправо формируется узкая диаграмма направленности "карандашного" типа. За счёт большого послесвечения экрана индикатора радиолокационные изображения от узкого и веерного лучей воспринимаются оператором как единое целое. При работе на развёртке "375" обзор поверхности осуществляется только узким лучом, который имеет в два раза больший коэффициент направленного действия.
Получение с помощью одной антенной системы двух различных форм диаграммы направленности осуществляется следующим образом.
Сдвоенный отражатель антенны состоит из симметричного параболического отражателя и отражателя специальной формы, выполненного в виде "козырька" в верхней части параболоида.
Параболический отражатель при облучении его электромагнитной энергией формирует диаграмму направленности в виде узкого луча "карандашного" типа. Он изготовлен из полностью металлизированной стеклоткани. Профиль отражающей поверхности отражателя специальной формы рассчитан из условия получения в вертикальной плоскости косекансной диаграммы направленности. Этот отражатель представляет собой
поверхность двойной кривизны, выполненной из металлизированной стеклоткани, металлизированные нити которой расположены строго горизонтально и имеют шаг 3 мм. Оба отражателя жестко соединены между собой и установлены на металлический штампованный держатель чашеобразной формы. Отражатель специальной формы размещается перед симметричным параболическим отражателем и закрывает только верхнюю его часть, образуя тем самим своеобразный "козырёк" антенного рефлектора.
Формирование соответствующей диаграммы направленности осуществляется изменением плоскости поляризации излучаемых высокочастотных колебаний.
При вертикальной поляризации облучающая электромагнитная энергия беспрепятственно проходит сквозь отражатель специальной формы с горизонтальным расположением металлизированных нитей и отражается от симметричного параболоида. При этом формируется диаграмма направленности в виде узкого луча. При изменении поляризации облучающих колебаний на горизонтальную происходит отражение от являющегося для данной поляризации непрозрачным отражателя специальной формы и формируется веерная диаграмма направленности косекансного типа. На рис. 2.2 приведены диаграммы направленности в двух плоскостях для обоих режимов работы антенны.
Для поворота плоcкости поляризации излучаемых высокочастотных колебаний на 90°, необходимого для изменения формы диаграммы направленности с узкого луча на веерный, в РЛС "Гроза" применён ферритовый вращатель. Ферритовый стержень вращателя установлен на фторопластовой втулке внутри круглого волновода. Вдоль оси феррита действует постоянное магнитное поле, создаваемое электромагнитом, размещённым на волноводе.

Рисунок 2.2 – Принцип получения веерной и игольчатой диаграмм направленности при смене поляризации
Угол поворота плоскости поляризации зависит от величины и направленности этого поля, которые устанавливаются с помощью реле изменения поляризации при смене режима работы станции. В режиме "Земля" (масштабы развертки "30", "50" и "125") на катушку реле подаётся напряжение от бортсети +27В. Реле при этом срабатывает и через замкнувшиеся контакты обеспечивает питание электромагнита постоянным током такой величины и направления, которые обеспечивают получение горизонтальной поляризации излучаемой энергии и, тем самым, формирование веерной диаграммы направленности. В режиме "Земля" при масштабе развёртки "375" катушка реле обесточена. При этом поляризация излучения - вертикальная и антенной формируется узкий луч. При развёртке "250" и работе РЛС в режиме "Земля" питание на катушку реле подаётся не непрерывно, а через контакты кулачкового механизма выключателя. Кулачок механизма связан с азимутальной осью антенны и обеспечивает замыкание контакта механизма при движений рефлектора в одну сторону и его размыкания при движении в противоположном направлении. За счёт этого на развертке обеспечивается черестактный обзор земной поверхности узким и веерным лучём. Для наилучшего наблюдения радиолокационных отражений от средних и крупных промышленных центров, а также для выравнивания отражений от фона, с целью наиболее чёткого воспроизведения на индикаторе водных ориентиров, в режиме "Земля" применяется "трёхтоновый" видеоусилитель. Ступенчатая амплитудная характеристика видеоусилителя позволяет исключить из радиолокационного изображения промежуточный диапазон сигналов, лежащих между слабыми и сильными, затрудняющих расшифровку изображения и ориентировку. На экране выделяются три "тона": "черный" (отсутствие отражённого сигнала, что соответствует гладким водным поверхностям); "серый" (слабые сигналы, соответствующие отражению от земной поверхности); "белый" (сильные сигналы от интенсивно отражающих объектов). Подбор оптимального характера изображения производится пилотом или штурманом применительно к конкретной обстановке с помощью ручки "Контраст". Всё управление радиолокатором при его работе в режиме "Земля" осуществляется органами управления, расположенными на лицевой панели индикаторного блока.
Режим работы "Метео".
При работе РЛС в этом режиме обеспечивается получение на индикаторе в полярных координатах "азимут-дальность" радиолокационного изображения воздушной обстановки в пространстве, ограниченном азимутальными углами ±100° относительно строительной оси самолёта и углами места ± (1,5 - 2°) относительно плоскости горизонта. Для того, чтобы сектор обзора не изменял своего положения в пространстве при кренах и тангаже самолёта, что особенно важно при обходе грозовых зон, ось диаграммы направленности антенны гиростабилизирована. При необходимости обзора пространства под другими углами места диаграмма направленности антенны может быть наклонена вручную относительно плоскости горизонта на угол ±10°.
В режиме работы "Метео" обзор пространства осуществляется РЛС с помощью симметричной узкой диаграммы направленности, получаемой в антенне при вертикальной поляризации излучаемых колебаний.
Пример радиолокационного изображения при работе РЛС в режиме "Метео" представлен на рис.2.3,а.
Всё управление РЛС в этом режиме осуществляется переключателем длительностей развёртки и ручкой ручного наклона антенны "Наклон".
Режим работы "Контур".
В этом режиме радиолокатор позволяет выявить внутри отражений от грозовых областей и кучево-дождевых облачностей наиболее опасные для полёта зоны, состоящие из водных капель большого диаметра. За счёт специального построения схемы видеоусилителя указанные участки представляются на экране индикатора в виде затемнённых областей, расположенных внутри ярких отметок от обнаруженных грозовых зон. Примерный вид радиолокационного изображения грозовых зон при включении режима "Контур" представлен на рис. 2.3,б (сравните с рис. 2.3, а).

Рисунок 2.3-Пример радиолокационного изображения при работе РЛС в режиме (а) "Метео" и (б) "Контур".
Затемнение областей, соответствующих участкам с высокой отражающей способностью, обеспечивается применением специальной характеристики, подавляющей все принимаемые сигналы, амплитуда которых превосходит определённый фиксированный уровень.
Для предотвращения полного или частичного подавления сигналов от более слабых областей грозовой зоны, вызванного увеличением амплитуды отражённых сигналов при уменьшении дальности до них, в режиме "Контур" производится временная регулировка усиления приёмного устройства. Закон изменения усиления в зависимости от дальности выбран в РЛС таким, что обеспечивает практическое постоянство амплитуды принимаемых с одного и того же объекта сигналов при изменении дальности до него от 30-40 до нескольких километров. В остальном работа радиолокатора в режиме "Контур" аналогична его работе в режиме "Метео".
Режим работы "Снос"
На рис.2.4 показан навигационный треугольник скоростей с учётом только горизонтальных составляющих воздушной скорости V, совпадающей по направлению с осью самолёта, скорости ветра U и результирующего вектора, совпадающего с линией пути - путевой скорости W. Угол сноса . между векторами V и W определяется в режиме работы "Снос".
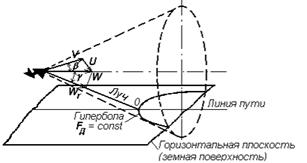
Рисунок 2.4 –Навигационный треугольник скоростей и линия равных доплеровских частот – изодоплеровская линия
Измерение угла сноса самолёта основано на фиксации минимальной частоты биений вторичного эффекта Доплера, которые возникают при отражении сигнала от земной поверхности или иных протяжённых объектов. Для пояснения этого эффекта целесообразно воспользоваться понятием линий равных доплеровских частот на земной поверхности. Принцип их получения при горизонтальном полёте представлен на рис.2.4.
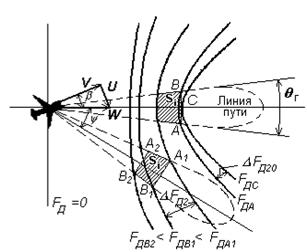
Рисунок 2.5 – Семейство изодоплеровских гипербол
Значение частоты Доплера при отражении сигнала от точки земной поверхности 0, лежащей на линии пути при бесконечно узкой диаграмме направленности РЛС, определяется
![]() , (2.2)
, (2.2)
где l - длина волны передатчика.
Из выражения (2.2) следует, что ![]() при g = const. Полагая g = const, будем мысленно вращать луч вокруг вектора W , образуя лучом поверхность конуса с осью, совпадающей с W. На земной поверхности луч прочертит кривую равных доплеровских частот, которая является гиперболой, так как образуется как линия пересечения конуса и горизонтальной поверхности, параллельной оси конуса. Полученную гиперболу называют изодоплеровской, потому что она проходит через точки земной поверхности, которым соответствует постоянная частота Доплера. Меняя значение g, можно получить семейство изодоплеровских гипербол, каждой из которых будет соответствовать своё новое значение Fд (рис 2.5). Используя это семейство, можно определить Fд при получении отражённых сигналов от любой точки земной поверхности,
при g = const. Полагая g = const, будем мысленно вращать луч вокруг вектора W , образуя лучом поверхность конуса с осью, совпадающей с W. На земной поверхности луч прочертит кривую равных доплеровских частот, которая является гиперболой, так как образуется как линия пересечения конуса и горизонтальной поверхности, параллельной оси конуса. Полученную гиперболу называют изодоплеровской, потому что она проходит через точки земной поверхности, которым соответствует постоянная частота Доплера. Меняя значение g, можно получить семейство изодоплеровских гипербол, каждой из которых будет соответствовать своё новое значение Fд (рис 2.5). Используя это семейство, можно определить Fд при получении отражённых сигналов от любой точки земной поверхности,
В реальной РЛС луч антенны имеет конечную ширину в горизонтальной qв и вертикальной .в плоскостях, а зондирующий сигнал - импульс с длительностью и. Поэтому в каждый момент времени на вход приёмника РЛС одновременно будут поступать сигналы, отражённые от совокупности отражателей, лежащих в пределах участка местности Si (рис. 2.5-2.6). Протяжённость участка Si в направлении от самолёта определяется разрешающей способностью РЛС по дальности и углом наклона gi, а в поперечном направлении - шириной диаграммы qr и произвольно выбранным расстоянием Ri.
Площадь участка Si будет приближённо равна
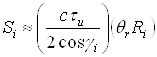 . (2.3)
. (2.3)
Участок Si для двух положений диаграммы направленности антенны РЛС по азимуту, спроектированный на сетку изодопплеровских частот, показан на рис.2.5 и на рис.2.6 в трёхмерной системе координат.
Как следует из рис.2.5, если ось луча смещена относительно линии пути на угол y, то частоты колебаний, отражённых от всех точек площадки Si, различны. Наибольшее различие соответствует точкам А1 и В2.
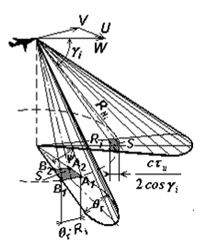
Рисунок 2.6 – Участки местности Si, сигналы от которых принимаются РЛС
Максимальная доплеровская частота в пределах участка Si будет получена от точечного отражателя в точке А1, а минимальная - от отражателя в точке В2 (рис.2.5 –2.6).
Для равноудаленных от РЛС точек в пределах участка Si наибольшее отличие в радиальных скоростях и, следовательно, в доплеровских частотах Fд соответствует точкам А1 и В1
 ,
,
 , (2.4)
, (2.4)
где qr - ширина диаграммы направленности в горизонтальной плоскости.
Сигналы, отражённые от разных точек Si , суммируются на входе приёмника и на выходе амплитудного детектора образуют разностные частоты, которые называются вторичными доплеровскими частотами (биениями).
Для пояснения возникновения вторичных доплеровских частот рассмотрим суммарный сигнал ![]() , образованный сигналами UА1(t) и UВ1(t), отражёнными только от точек А1 и В1 площадки Si. При этом будем считать, что РЛС работает в непрерывном режиме, излучая немодулированное синусоидальное колебание частоты f0 , а отражённые сигналы от точек А1 и В1 имеют одинаковые амплитуды ZА1 =ZВ1=Z
, образованный сигналами UА1(t) и UВ1(t), отражёнными только от точек А1 и В1 площадки Si. При этом будем считать, что РЛС работает в непрерывном режиме, излучая немодулированное синусоидальное колебание частоты f0 , а отражённые сигналы от точек А1 и В1 имеют одинаковые амплитуды ZА1 =ZВ1=Z
 (2.5)
(2.5)
где j1 и j2 - набег фазы, возникающий при отражении зондирующего сигнала от точек А1 и В1. Как следует из выражения (2.5) суммарный сигнал ![]() является амплитудно-модулированным. Функция
является амплитудно-модулированным. Функция

определяет закон амплитудной модуляции, а FДА1 и FДВ1 – частоту амплитудной модуляции.
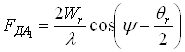
Таким образом, на выходе амплитудного детектора приёмника РЛС будет иметь место амплитудно-модулированное колебание. Огибающая амплитудно-модулированного суммарного сигнала ![]() на выходе УПЧ и соответствующее этому сигналу напряжение на выходе амплитудного детектора представлены пунктиром на рис.2.7 для двух значений отклонения диаграммы направленности антенны от линии пути
на выходе УПЧ и соответствующее этому сигналу напряжение на выходе амплитудного детектора представлены пунктиром на рис.2.7 для двух значений отклонения диаграммы направленности антенны от линии пути ![]() и
и ![]() .
.
В реальных условиях на вход приёмника РЛС одновременно поступают сигналы, отражённые от множества точек участка Si.
Доплеровские частоты этих сигналов различны и меняются, в зависимости от расположения отражающей точки площадки Si , в пределах от FДА1 до FДВ1.
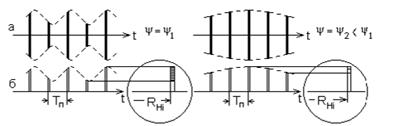
Рисунок 2.7 – Биение амплитуды сигнала, принимаемого от участка Si, на выходе УПЧ (а) и амплитудного детектора (б) при непрерывном (обозначено пунктиром) и импульсном сигнале, вызванные вторичным эффектом Доплера.
Поэтому, в результате сложения принимаемых сигналов в приёмном тракте РЛС амплитуда результирующего колебания меняется не по косинусоиде, как в рассмотренном выше примере и показано на рис. 2.8, а более сложным образом. Спектр изменения амплитуды результирующего сигнала называется спектром вторичных доплеровских частот. Для равноудалённых от РЛС точек площадки Si ширина спектра доплеровских частот будет
![]() , (2.6)
, (2.6)
где ![]() - радиальная скорость движения самолёта относительно точки земной поверхности, находящейся на линии пути под углом
- радиальная скорость движения самолёта относительно точки земной поверхности, находящейся на линии пути под углом ![]() (рис. 2.6).
(рис. 2.6).
Зависимость ширины спектра вторичных доплеровских частот от направления луча диаграммы направленности y для равноудалённых от РЛС точек характеризуется полярной диаграммой, показанной на рис. 8. В ней направление радиуса вектора соответствует углу поворота диаграммы направленности в горизонтальной плоскости y, а длина (в пределах сплошных касающихся окружностей) - ширина спектра вторичных доплеровских частот.

Рисунок 2.8 – Полярная диаграмма ширины спектра вторичных доплеровских частот в горизонтальной плоскости
Значение ширины спектра DFД2 достигает минимума при установке антенны в положение, при котором проекция направления максимума диаграммы направленности на земную поверхность совпадает с направлением линии пути самолёта.
При этом частоты колебаний, отражённых от точек А и В, равны между собой и наибольшая частота биений образуется при отражении от точек С и В (или А) (рис. 2.5).
![]() . (2.7)
. (2.7)
Эта величина достаточно мала (например, при W = 720 км/ч, g = 78°, l = 5 см, ![]() =5° получим FД2О » 4 Гц, т.е. практически нулевые биения.
=5° получим FД2О » 4 Гц, т.е. практически нулевые биения.
Для зондирующего сигнала в виде некогерентных импульсов следует иметь в виду, что отражённые импульсы от равноудалённых целей имеют одинаковую (хотя и случайную) начальную фазу. Поэтому; при достаточно высокой частоте повторения изменение амплитуды импульсов на входе приёмника за счёт биений будет происходить также, как для амплитуды непрерывных колебаний.
Для выделения вторичных доплеровских биений в некогерентных РЛС достаточно воспользоваться обычным амплитудным детектором, в то время как в когерентных РЛС для определения требуется специальное опорное (когерентное) напряжение и фазовый детектор. За счёт вторичного эффекта Доплера амплитуда результирующего сигнала от площадки Si изменяется от одного периода повторения импульсов к другому с частотой FД2.
На рис. 2.8 показаны изменения амплитуды некогерентных импульсов на входе приёмника (а) и на выходе амплитудного детектора (б) за счёт вторичных доплеровских биений, принимаемых только от участка Si. При развороте антенны на угол относительно линии пути частота биений будет достаточно высока, что приводит к быстрому "мерцанию" яркости (амплитуды) отметки цели (рис. 2.8,а). При y = 0 частота биений минимальна (рис.2.7). Минимальную частоту биений можно зафиксировать на индикаторе кругового обзора, если выключена азимутальная развёртка, а угловое положение линии развёртки дальности с яркостной модуляцией отметок целей медленно изменяется лётчиком за счёт ручной регулировки азимутального положения антенны. При совпадении проекции оси косекансной диаграммы направленности с линией пути самолёта частота "мерцания" яркостных отметок всех целей на развёртке дальности будет минимальной и близкой к нулю. Угол смещения развёртки дальности относительно нуля азимутальной шкалы индикатора будет соответствовать углу сноса b самолёта (рис.2.7). При измерении угла сноса самолёта управление движением антенны по азимуту производится вручную путём периодического подключения обмотки управления азимутального электродвигателя к пониженному переменному напряжению той или иной фазы, определяющей направление движения. Это выполняется с помощью клавиш, размещённых на лицевой панели основного индикатора слева от экрана. Так как питание двигателя осуществляется при этом пониженным напряжением, то скорость азимутального движения рефлектора при измерении угла сноса меньше, чем при других режимах. Для удобства управления антенной и получения требуемой точности её установки в РЛС предусмотрена возможность плавного изменения скорости с помощью специального регулятора, совмещённого с регулятором "Контраст".
Момент совпадения оси диаграммы с линией пути определяется по уменьшению до минимума частоты "мерцания" яркостной модуляции линии развёртки, а отсчёт угла сноса производится по азимутальной шкале индикатора, имеющей градуировку через два градуса (см. рис.2.9).
Рисунок 2.9 – Передняя панель индикаторного блока
Управление РЛС в режиме "Снос" осуществляется органами управления, расположенными на основном индикаторе. К ним относятся: переключатель длительностей развёртки; регулятор наклона антенны "Наклон"; регулятор "Контраст"; клавиши " ![]() " , расположенные слева от экрана индикатора.
" , расположенные слева от экрана индикатора.
Режим работы "Коррекция"
На ряде самолётов гражданской авиации, на которых установлены бортовые навигационные вычислители, с помощью РЛС "Гроза" может быть произведена коррекция счисленных вычислителями текущих координат места самолёта. Для этого используется какой-либо чётко наблюдаемый и легко опознаваемый объект с известными координатами и, по возможности, наименьших размеров. Его координаты вводятся в навигационный вычислитель, который при работе в специальном режиме определяет ожидаемые наклонную дальность и курсовой угол этого объекта в данный момент времени. Полученная информация передаётся вычислителем в РЛС, где она наносится на экран индикатора в виде светящегося кольца ожидаемой дальности и радиальной линии ожидаемого курсового угла (электронное перекрестие). На пересечении этих линий и должно по расчетам вычислителя находиться радиолокационное изображение наземного объекта. Так как текущие координаты места самолёта определяются вычислителем с ошибкой, точного совпадения практически не происходит и, чтобы его осуществить, необходимо изменить (увеличить или уменьшить) определённые вычислителем значения координат. Значения текущих координат места самолёта, при установке которых достигнуто совпадение, можно считать истинными и использовать в вычислителе, взамен ранее счисленных, для всех последующих расчётов до следующей очередной коррекции. Таков принцип выполнения радиолокационной коррекции. Радиолокатор при коррекции навигационного вычислителя является только индикатором совмещения, служащим для определения момента наложения перекрестия на изображение объекта. Все управление перекрестием и установка необходимых режимов работы различной аппаратуры борта осуществляется при этом с пульта вычислителя, а каких либо операций с помощью имеющихся в РЛС "Гроза" органов управления не производится. Формирование электронного перекрестия осуществляется в радиолокаторах "Гроза" в специальном блоке коррекции.
Режим работы "Готов"
Когда переключатель режимов работы установлен в положение "Готов", излучения радиоволн не происходит, но радиолокатор находится в состоянии готовности к немедленной работе, если перед этим не менее чем 5 мин он был подключен к самолетной сети с помощью клавиши "РЛС"
3. ФУНКЦИОНАЛЬНЫЕ СХЕМЫ БЛОКОВ РЛС "ГРОЗА"
3.1 Антенный блок
Антенный блок РЛС "Гроза" предназначен для выполнения следующих функций:
излучения в пространство высокочастотных импульсов, генерируемых передающим устройством станции в пределах узкого и веерного луча в зависимости от режима работы РЛС;
приёма сигналов, отражённых от наземных и воздушных отражающих объектов;
изменения направления излучения и приёма сигналов в азимутальной плоскости;
гироскопической стабилизации осей узкого, веерного лучей в плоскости горизонта или другой заданной плоскости при кренах и тангаже самолета;
модуляции пилообразного тока развертки по закону синуса и косинуса текущего азимутального угла поворота антенны.
В зависимости от класса и типа самолёта, для установки на котором он предназначается, антенный блок носового размещения выпускается в двух модификациях, отличающихся только диаметром рефлектора (760 мм и 560 мм).
Похожие работы
... функционально-узлового метода конструирования, повышающего надёжность аппаратуры и её качественные показатели; широкое применение цифровых устройств. В данной курсовой работе предлагается спроектировать импульсный передатчик для наземной радиолокационной станции. Радиолокация решает задачи обнаружения, определения координат и параметров движения различных объектов с помощью отражения или ...
... обзора земли с целью обеспечения возможности автономной навигации по характерным наземным радиолокационным ориентирам. 3. Обоснование, выбор и расчет тактико-технических характеристик радиолокационной станции 3.1. Обоснование, выбор и расчет тактических характеристик РЛС 3.1.1. Максимальная дальность действия RmaxМаксимальная дальность действия задается тактическими требованиями и зависит ...
... техническому совершенству, боевым и эксплуатационным качествам не уступали лучшим зарубежным образцам, а нередко и превосходили их. Большинство из созданных в эти годы образцов в большей или меньшей степени представляли собой высокоточное оружие. В них использовались высокоточные инерциальные системы, системы коррекции и телеуправления движением на траектории и системы самонаведения на конечном ...
... систем в РЛГС четыре: 3.2.1 Радиолокационная часть РЛГС Радиолокационная часть РЛГС состоит из: · передатчика. · приемника. · высоковольтного выпрямителя. · высокочастотной части антенны. Радиолокационная часть РЛГС предназначена: · для генерирования высокочастотной электромагнитной энергии заданной частоты (f±2,5%) и мощности 60 Вт, которая в виде коротких ...
0 комментариев