Навигация
Исследование асинхронного исполнительного двигателя с полным немагнитным ротором
34591
знак
3
таблицы
10
изображений
Содержание
1. Цель работы
2. Назначение АИД
3. Конструкция АИД
4. Магнитные поля АИД
5. Вращающий момент АИД
6. Способы управления АИД
7. Самоход и способы его устранения
8. Статические свойства АИД
9. Динамические свойства АИД
10. Программа экспериментальных исследований АИД
11. Расчеты и построения
12. Содержание отчета
13. Контрольные вопросы
Приложение А
Приложение Б
1. Цель работы
В настоящей лабораторной работе изучается назначение, конструкция, принцип действия, а также статические и динамические свойства асинхронного исполнительного двигателя переменного тока (АИД) с полым немагнитным ротором.
2. Назначение АИДИзучаемый двигатель предназначен для работы в системах управления и автоматики (СУ и А) как преобразователь электрического сигнала, вырабатываемого устройством управления СУ и А, в скорость вращения или угол поворота вала.
Существуют три разновидности асинхронных исполнительных микродвигателей: с полым немагнитным ротором, с полым магнитным ротором и с короткозамкнутой обмоткой типа беличьего колеса. В СУ и А наибольшее распространение получили асинхронные исполнительные двигатели с полым немагнитным ротором. Такие двигатели производятся на мощности от сотых долей до нескольких сотен ватт, для стандартной – 50 Гц. и повышенных частот (200, 400,500 и 1000 Гц.) питающего напряжения. Скорость их вращения лежит в диапазоне 1500¸ 3000 oб/ мин.
Основными достоинствами асинхронных исполнительных двигателей с полым немагнитным ротором являются:
- Малый момент инерции J ротора.
- Значительный пусковой момент вследствие повышенного сопротивления ротора, что совместно с малым J приводит к значительному быстродействию двигателя, малой электромеханической постоянной времени и обеспечивает повышенную устойчивость следящих систем с таким типом двигателей.
- Механическая (выходная, нагрузочная) характеристика двигателя близка к прямолинейной за счёт большого активного сопротивления ротора, обеспечивающего значительное критическое скольжение (то есть скольжение при максимальном моменте ![]() ).
).
- Широкий диапазон регулирования скорости (кратность регулирования ![]() ), отсутствие скачкообразных изменений, прямая пропорциональность скорости напряжению управления, способность к быстрому реверсу (изменению направления вращения), отсутствие высших зубцовых гармоник в кривой поля, что определяет плавность и бесшумность хода.
), отсутствие скачкообразных изменений, прямая пропорциональность скорости напряжению управления, способность к быстрому реверсу (изменению направления вращения), отсутствие высших зубцовых гармоник в кривой поля, что определяет плавность и бесшумность хода.
- Самоторможение двигателя при снятии сигнала управления (определяется большим ![]() ).
).
- Отсутствие подвижных контактов, малый момент трения, отсутствие искрения и радиопомех, стабильность и надёжность в эксплуатации.
- Независимость параметров и характеристик двигателя от температуры, давления, влажности.
- Возможность улучшения массо-габаритных показателей при переходе к повышенным (400 ¸ 500 Гц.) частотам питающего напряжения.
Асинхронный исполнительный двигатель с полым немагнитным ротором имеет следующие недостатки:
- Большой немагнитный зазор в магнитной цепи машины (![]() ), что определяет большой намагничивающий ток, увеличенные потери энергии и относительно низкий, по сравнению с другими типами АИД, коэффициент мощности (
), что определяет большой намагничивающий ток, увеличенные потери энергии и относительно низкий, по сравнению с другими типами АИД, коэффициент мощности (![]() ).
).
- Значительное электрическое сопротивление ротора и, как следствие, работа двигателя при больших скольжениях, что приводит к увеличению потерь энергии в статоре и роторе, а также к снижению КПД.
- Относительно увеличенные удельные (то есть приходящиеся на единицу полезной мощности) масса и габариты двигателя.
3. Конструкция АИД
Конструкция АИД должна решать задачу преобразования электрической энергии в механическую, приводящую во вращение вал двигателя с присоединённой нагрузкой (объектом управления). Это преобразование в общем виде описывается законом электромагнитного усилия, который утверждает, что механическая сила возникает при взаимодействии одноимённых полей (электрических или магнитных) и приложена к инерционным источникам этих полей.
В электромагнитных устройствах систем управления взаимодействуют два магнитных поля, причём одно поле должно создаваться той частью машины, которая будет вращаться, а источник второго поля может быть неподвижным. Поэтому в конструкции любой электрической машины имеется неподвижная часть- статор и подвижная- ротор.
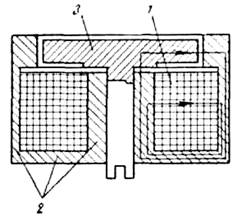
В данной лабораторной работе исследуется АИД переменного тока с полым немагнитным ротором. Схема его конструкции показана на рисунке 1, а макет имеется на рабочем столе возле лабораторного стенда.
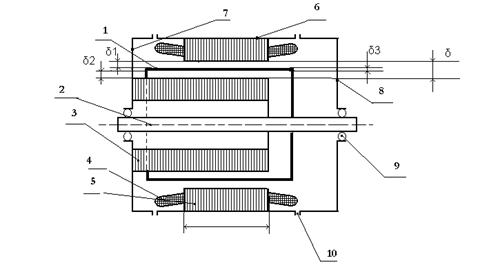
Рисунок 1 - Схема конструкции асинхронного исполнительного двигателя с полым немагнитным ротором
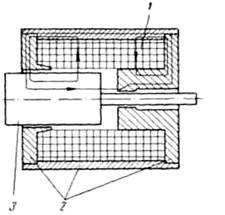
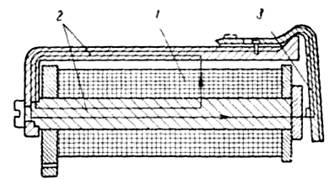
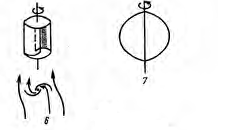
Неподвижная часть машины состоит из внешнего магнитопровода 5 с обмотками 4,внутреннего магнитопровода 3, корпуса 6, левого 7 и правого 8 подшипниковых щитов с подшипниками 9 и узлов 10 соединения корпуса со щитами. Подвижная часть машины содержит вал 2 с жёстко укреплённым на нём тонкостенным цилиндром 1. Внешний магнитопровод 5 неявнополюсный, представляет собой стальное кольцо собранное из листовой электротехнической стали, по внутренней поверхности которого расположены пазы, в которые укладываются две распределённые обмотки, изготовленные из изолированного медного провода круглого или прямоугольного сечения. Оси этих обмоток смещены в пространстве на 90 электрических градусов. Внутренний магнитопровод 3 также неявнополюсный,набран из листов электоротехнической стали и укреплён на цилиндрическом выступе одного из подшипниковых щитов 7. Он служит для уменьшения магнитного сопротивления на пути рабочего магнитного потока машины и не имеет пазов и обмоток.
В микродвигателях, мощность которых не превышает 1.5 Вт, диаметр расточки статора (внутренний диаметр внешнего магнитопровода 6) мал и для облегчения укладки обмоток пазы выполняют по внешней поверхности внутреннего магнитопровода 3. При этом его диаметр несколько увеличивают для увеличения обмоточного пространства. Иногда одну из обмоток размещают на внешнем, а другую на внутреннем магнитопроводе.
Корпус и подшипниковые щиты в микромашинах выполняются из алюминиевых сплавов. В крупных машинах эти части конструкции выполняются обычно сварными из стальных листов необходимой толщины, реже литыми. Подшипники чаще всего используются шариковые качения, а в крупных машинах - роликовые. Если от двигателя требуется бесшумная работа, применяют подшипники скольжения – бронзовые или бронзографитные. В микромашинах используются полузакрытые пазы для укладки обмоток – рисунок 2. Внутреннюю поверхность паза изолируют 1, заполняют проводниками обмотки 2 и закрепляют проводники деревянными или пластмассовыми клиньями 3. На рисунке 2 показан паз, выполненный на внешнем магнитопроводе, если же его выполнять на внутреннем магнитопроводе, то граница пройдёт по штриховой линии.
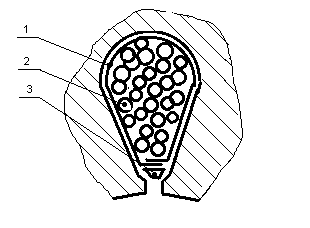
Рисунок 2 - Полузакрытый паз магнитопровода
Особенностью рассматриваемого двигателя является конструкция его ротора. Вал ротора 2 свободно вращается в подшипниках 9. На валу жёстко укреплён тонкостенный цилиндр 1, который также именуется стаканом. Стакан выполняется из немагнитного токопроводящего материала, как правило, из алюминиевых сплавов. Данная технология используется для получения минимальной механической инерционности двигателя, то есть для снижения его постоянной времени. Толщина стенок зависит от мощности двигателя и составляет ![]() мм, изготовление более тонких стенок технологически усложнено. Воздушные зазоры между стенками стакана и, обращёнными к нему поверхностями магнитопровода
мм, изготовление более тонких стенок технологически усложнено. Воздушные зазоры между стенками стакана и, обращёнными к нему поверхностями магнитопровода ![]() мм. Общий воздушный зазор в двигателе
мм. Общий воздушный зазор в двигателе![]() мм. Это обуславливает увеличение удельной (то есть приходящейся на единицу мощности) массы и габаритов по сравнению с другими типами асинхронных двигателей. Поэтому АИД с полым немагнитным ротором строят в диапазоне мощностей от долей до нескольких сотен ватт.
мм. Это обуславливает увеличение удельной (то есть приходящейся на единицу мощности) массы и габаритов по сравнению с другими типами асинхронных двигателей. Поэтому АИД с полым немагнитным ротором строят в диапазоне мощностей от долей до нескольких сотен ватт.
Похожие работы
... контактов обеспечивается выбором их материала и конструкции при использовании одноступенчатой системы. В заключение отметим, что в настоящее время начинают широко применяться электрические аппараты с герметизированными контактами и контактами, работающими в глубоком вакууме. Жидкометаллические контакты? Наиболее характерные недостатки твердометаллических контактов следующие: 1. С ростом ...
... в процессе монтажа, после его окончания и в условиях эксплуатации подлежат специальной проверке, опробованию и наладке в соответствии с требованиями, которые вытекают из условий их эксплуатации и специфических особенностей каждого вида установленного электрооборудования. Несоблюдение этого правила влечет за собой, отклонение от заданного режима работы или нарушение бесперебойного снабжения ...
... (М) при заданных скоростях ветрового потока (ВП). При этом математическое описание параметров ВП может быть получена вероятностными методами. Рисунок 1.9 – Структурная схема ВЭУ Одним из возможных направлений разработки АЭП имитатора является его реализация на базе привода постоянного тока (рис. 1.10). Одним из достоинств ДПТ является широкое и плавное регулирование скорости вращения, ...
... Мощность электродвигателя , кВт, привода дробилки рассчитывается по формуле , (11) где - удельный энергетический показатель дробилки, при дробимом материале известняке [1]; - производительность дробилки, м3/ч; - степень дробления, для роторной дробилки типоразмера 1250´1000 мм [1]; - средневзвешенный диаметр исходного продукта, м; ...
0 комментариев