Навигация
Потери в стали. Механические и добавочные потери
24987
знаков
1
таблица
7
изображений
6. Потери в стали. Механические и добавочные потери
Потери в стали (магнитные потери) и механические не зависят от нагрузки, поэтому они называются постоянными потерями и могут быть определены до расчета рабочих характеристик. Расчетная масса стали зубцов статора при трапецеидальных пазах.
Gz1 = 7,8 · Z1 · bz1 · hz1 · l1 · kc· 103 = 7,8 · 72 · 0,0067 · 0,041 · 0,151 · 0,97 · 103 = 22,6кг
Магнитные потери в зубцах статора для стали 2013. Pz1 = 4,4 ·B2z1 · Gz1 = 4,4 · 1,322 · 22,6 = 173,26Вт
Масса стали ярма статора. Ga1 = 7,8π(Da – hz1) · ha · l1 ·kc · 103 = 7,8 · 3,14(0,52 – 0,041) · 0,052 · 0,151 · 0,97 · 103 = 89,5кг
Магнитные потери в ярме статора. Pa1 = 4,4 · B2a · Ga1 = 4,4 · 0,992 · 89,5 = 385,96Вт
Суммарные магнитные потери в сердечнике статора, включающие добавочные потери встали.
![]()
Механические потери.
 Вт
Вт
Дополнительные потери при номинальной нагрузке определяются по эмпирической формуле.
Pдоп.н = 0,004 · P' = 0,04 · 58539,9 = 2341,6Вт
7. Расчет рабочих характеристик
Под рабочими характеристиками асинхронного двигателя понимаются зависимости:
P1, I1, I'2, cos φ', η, M, n = ƒ(P2),
Где Р1, Р2 – потребляемая и полезная мощности двигателя.
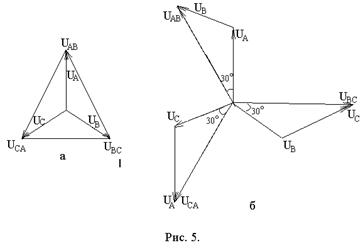
В основу рабочих характеристик положена система уравнений токов и напряжений, полученных из Г- образной схемы замещения асинхронного двигателя с вынесенными на выходные зажимы намагничивающим контуром. Рис. 5.
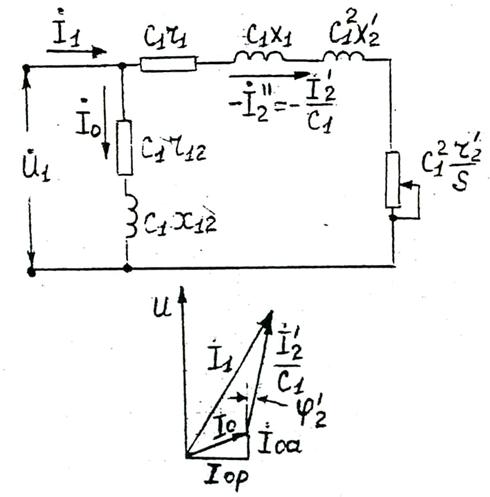
Рисунок 5 – Г- образная схема замещения и векторная диаграмма.
Коэффициент приведения параметров двигателя к Г- образной схеме замещения.
С1 = 1 + (x1/x12) = 1 + (0,28/13,2) = 1,021
Активное сопротивление обмотки статора, приведенное к Г- образной схеме замещения.
r'1 = C1 · r1 = 1,021 · 0.11 = 0,112Ом
Индуктивное сопротивление короткого замыкания, приведенное к Г- образной схеме замещения.
x'к = С1 · x1 + C21 · x'2 = 1,021 · 0,28 + 1,0212 · 0,17 = 0,463Ом
Активная составляющая тока холостого хода.
Ioa = (Pcm + 3 · I2µ · r1)/3 · U1н = (689 + 3 · 16,652 · 0,11)/3 · 220 = 1,18А
Расчет рабочих характеристик проводим для 5 значений скольжения в диапазоне:
S = 0,005 ÷ 1,25Sн,
где Sн – ориентировочно номинальное скольжение принимаем равным:
Sн = r'2* = 0,027
Все необходимые для расчета характеристик данные формулы сведены в таблицу 5.
Таблица 5
| № п/п | Расчетная формула | Ед. изм. | Скольжение | ||||
| 0,25Sн | 0,50Sн | 0,75Sн | 1,0Sн | 1,25Sн | |||
| 1 | C21 · r'2/S | Ом | 9,88 | 4,94 | 3,29 | 2,47 | 1,98 |
| 2 | R = r'1 + C21 ·r'2/S | Ом | 26,48 | 13,33 | 8,89 | 6,67 | 5,34 |
| 3 | x = x'к | 0,463 | 0,463 | 0,463 | 0,463 | 0,463 | |
| 4 | Z = √R2 + x2 | Ом | 26,48 | 13,34 | 8,9 | 6,7 | 5,32 |
| 5 | I"2 = U1н/Z | А | 8,3 | 16,49 | 24,72 | 32,84 | 40,74 |
| 6 | cosφ'2 = R/Z | 1 | 0,99 | 0,99 | 0,99 | 0,98 | |
| 7 | sinφ'2 = x/Z | 0,02 | 0,034 | 0,05 | 0,069 | 0,087 | |
| 8 | I1a = Ioa + I"2 · cosφ'2 | А | 9,48 | 17,5 | 25,65 | 33,69 | 41,11 |
| 9 | I1p = Iop + I"2 · sinφ'2 | А | 16,82 | 17,21 | 17,89 | 18,91 | 20,19 |
| 10 | I'2 = C1 · I"2 | А | 8,47 | 16,83 | 25,24 | 33,53 | 41,6 |
| 11 | I1 = √I21a + I21p | А | 26,3 | 34,71 | 43,54 | 52,6 | 61,3 |
| 12 | P1 = 3 · I"22· r'2 · 10-3 | кВт | 9,27 | 11,55 | 16,87 | 22,23 | 27,13 |
| 13 | Pэ1 = 3 · I21 · r1· 10-3 | кВт | 0,23 | 0,4 | 0,63 | 0,93 | 1,26 |
| 14 | Pэ2 = 3 · I"22 · r'2 · 10-3 | кВт | 0,013 | 0,05 | 0,12 | 0,21 | 0,32 |
| 15 | Pдоб = Pдоб.н(I1/I1н)2 | кВт | 0,58 | 1,01 | 1,59 | 2,32 | 3,15 |
| 16 | ∑P = Pcm + Pмех + Pэ1 + Pэ2 + Pдоб | кВт | 8,092 | 8,729 | 9,609 | 10,729 | 11,999 |
| 17 | P2 = P1 - ∑P | кВт | 1,178 | 2,821 | 7,261 | 11,501 | 15,131 |
| 18 | η = 1 - ∑P/P1 | 0,18 | 0,24 | 0,43 | 0,52 | 0,56 | |
| 19 | cosφ = I1a/I1 | 0,36 | 0,5 | 0,59 | 0,64 | 0,67 | |
| 20 | Pэм = P1 – Pэ1 – Pсm | кВт | 8,351 | 10,46 | 15,55 | 20,61 | 25,18 |
| 21 | ω1 = 2π · n1/60 | Рад/с | 314 | 314 | 314 | 314 | 314 |
| 22 | M = Pэм · 103/ω1 | Н.м | 26,6 | 33,3 | 49,5 | 65,6 | 80,2 |
| 23 | n = n1 ·(1 – S) | Об/мин | 2980 | 2960 | 2940 | 2919 | 2899 |
После расчета рабочих характеристик производим их построение
По номинальному току определяются номинальные параметры двигателя:
Р2н = 7,2кВт
Р1н = 17,5кВт
I'2н = 51,2А
сosφн = 0,61
ηн = 0,40
Мн = 50Н·м
nн = 2800об/мин
Sн = 0,018
Максимальный момент в относительных единицах.
Мmax* =Mmax / Mн =[(Sн /Sm) + (Sm/Sн)]/2 = [(0,018/0,20) + (0,20/0,018)]/2 =5,6
![]()
Похожие работы

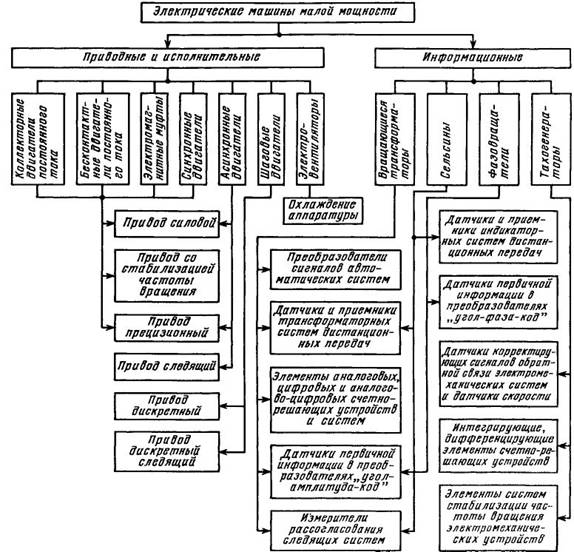

... дешевле сервоприводов. Шаговый привод как недорогая альтернатива сервоприводу наилучшим образом подходит для автоматизации отдельных узлов и систем, где не требуется высокая динамика. Заключение Электрические машины малой мощности имеют, как правило, закрытое конструктивное исполнение, рассчитанное на работу в любом положении в пространстве, длительные сроки сохраняемости. Конструкция этих ...


... с геометрической нейтрали в направлении вращения якоря у генераторов или встречно направлению вращения якоря у двигателей. Этот способ улучшения коммутации применим лишь в нереверсируемых электрических машинах, работающих с неизменной нагрузкой. Искрение на коллекторе является интенсивным источником электромагнитных колебаний частотой от 1000 до 3000 Гц. Эти колебания распространяются по сети и ...
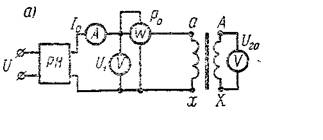
... 4 Содержание отчета Схема включения однофазного счетчика в сеть. Схема включения трехфазного счетчика (п.7). Таблица с результатами измеренных и вычисленных значений. 3. Выводы о результатах поверки счетчика. Контрольные вопросы. 1. Единицы измерения электрической энергии. 2. Основные части счетчика и их назначение. 3. Принцип работы индукционного ...
... особенностью машины постоянного тока является наличие коллектора и скользящего контакта между обмоткой якоря и внешней электрической цепью. 2.2 Устройство машины постоянного тока Машина постоянного тока (рис. 2.3) по конструктивному исполнению подобна обращенной синхронной машине, у которой обмотка якоря расположена на роторе, а обмотка возбуждения – на статоре. Основное отличие заключается ...
0 комментариев