Навигация
Структурный анализ механизма
17497
знаков
10
таблиц
2
изображения
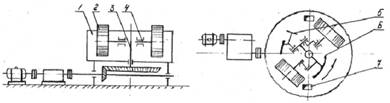
1.1 Структурный анализ механизма
Большинство современных механизмов в различной аппаратуре широко используют схемы кривошипно-шатунных механизмов или шарнирных трехзвенников. Правильно изготовленные схемы кривошипно-шатунных механизмов в значительной мере усовершенствуют механизм в котором они применяются. Схемы кривошипно-шатунных механизмов применяют в машиностроении в очень больших количествах. Любое усовершенствование механизма должно основываться на том, что это усовершенствование принесет большой экономический эффект, понизит стоимость производства, сократит затраты человеческих ресурсов. Самыми важными свойствами какого-либо механизма являются: прочность, надежность и долговечность. Несоблюдение этих свойств, может привести к выходу из строя всего механизма или его отдельных элементов и в результате, привести к нарушению нормальной работы устройства в котором оно задействовано.Ведущее звено механизма вращается против часовой стрелки с заданной частотой вращения.
Звенья механизма соединены кинематическими парами:
1-2 – кинематическая пара 5 класса, вращающаяся;
2-3 - кинематическая пара 5 класса, вращающаяся;
2-4 - кинематическая пара 5 класса, поступательная;
3-5 - кинематическая пара 5 класса, поступательная.
1.2 Кинематический анализ механизма
Определение координат точек звеньев механизма при его двенадцати положениях
Схема механизма в двенадцати положениях приведена в листе 1 графической части. Исходя из схемы механизма находим координаты всех точек звеньев механизма. Выразим координаты всех точек механизма в функции угла φ.
Координаты точки В будут определяться по следующим формулам:
XВ = AВ cos φ; YВ = АВ sin φ.
Координаты точки С будут определяться по следующим формулам:
XС=![]() + XВ YС=0
+ XВ YС=0
Координаты точки E будут определяться по следующим формулам:
XE= XВ +(![]() )/2 YE= (ВС/2) sin
)/2 YE= (ВС/2) sin![]()
sin![]() =(АВ/ВС) sin φ
=(АВ/ВС) sin φ
Координаты точки D будут определяться по следующим формулам:
XD=0 YD=![]() + YE
+ YE
По этим формулам определяем координаты каждой точки механизма для двенадцати положений (при изменении угла φ от 0 до 3600) и заносим полученные данные в таблицу 1, где сравниваем их с координатами точек полученных графическим способом (координаты определенные графическим способом уже занесены в таблицу 1).
Определение траекторий точек звеньев механизма
При рассмотрении движения механизма при изменении угла φ от 0 до 3600, можно сделать вывод, что траекториями движения точки B является окружность радиусом равным AB. Точка E движется по элепсоидной траектории. Точки С и D совершают колебательное движение.
Построение планов скоростей
Построение планов скоростей начинаем с определения скорости точки В. Кривошип АВ вращается вокруг неподвижной оси, поэтому линейная скорость любой точки численно равна произведению угловой скорости звена на расстояние от этой точки до оси вращения:
VB = АВ* ω= АВ*n*π/30=360*3.14*26*10-3/30= 979.68*10-3 м/c
Направлена линейная скорость точки В по касательной к траектории или перпендикулярно АВ в сторону вращения. Выбрав отрезок (в мм) PVA, изображающий скорость точки В, посчитаем масштабный коэффициент плана скоростей
μV = VВ/PVВ = 979.68*10-3/196 = 5*10-3 м/с/мм
Величину PVA выбираем произвольно, но так, чтобы μV получилось числом, удобным для счета.
Определим скорость точки С. Звено ВС совершает поступательное плоское движение. Скорость любой точки плоско движущегося звена равна геометрической сумме скорости полюса и скорости движения вокруг полюса. Приняв за полюс точку В, скорость которой уже известна, получим
_ _ _
VС = VСВ + VВ(1,1,3)
Так как вектор VСВ перпендикулярен ВС, то, выполнив построение плана скоростей, получаем
VСB= μV * PVCB =5*10-3*104=520*10-3 м/с
PVC= 138 мм, тогда VС= μV * PVС =5*10-3*138=169*10-3 м/с
Скорость точки Е определим аналогично скорости точки С:
VЕ =VEВ+VВ
Скорость VЕ направлена по той же линии действия, что и скорость VС.
VЕ = PVЕ* μV =5*10-3*162=810*10-3 м/с
Находим скорость точки D:
VDE= μV * PVDE =5*10-3*160=800*10-3 м/с
VD =VDE+VE,
из плана скоростей PVD=92 мм, значит
VD= PVD* μV =5*10-3*92=460*10-3 м/с
Находим скорости центров масс:
VS1= PS1* μV=5*10-3*98=490*10-3 м/с
VS2= PS2* μV=5*10-3*162=810*10-3 м/с(1,1,5)
VS3= PS3* μV=5*10-3*106=530*10-3 м/с
VS4= PS4* μV=5*10-3*50=250*10-3 м/с
VS5= PS5* μV=5*10-3*68=340*10-3 м/с
Таблица 1.1. Рассчитанные значения скоростей
| VB, м/с | VC, м/с | VD, м/с | VE, м/с | VBA,м/с | VCB,м/с | VDE м/с | VS1, м/с | VS2, м/с | VS3, м/с | VS4, м/с | VS5, м/с |
| 980*10-3 | 169*10-3 | 460*10-3 | 810*10-3 | 980*10-3 | 520*10-3 | 800*10-3 | 490*10-3 | 490*10-3 | 530*10-3 | 250*10-3 | 340*10-3 |
Аналогичным образом определяются скорости точек механизма для других значений угла φ. Результаты вычислений заносим в таблицу 1.1.
При помощи плана скоростей определяем угловую скорость звеньев:





Результаты вычислений заносим в таблицу 1.2
Таблица 1.2 Рассчитанные значения угловых скоростей
|
| | |
| 0.038 | 0.0065 | 0.0084 |
Построение планов ускорений
Построение плана ускорений начинаем с определения ускорения точки B. Кривошип AB совершает вращательное движение, поэтому
aB = aBn + aBτ
aBn = AB*ω2(1,1,7)
aBτ = ε1*AB
В нашем случае кривошип вращается равномерно ε1 = 0 и aBτ = 0.
Следовательно, модуль ускорения точки B
aB = aBn = AB*ω2 = 37.682*26 = 36.9 м/с2
Вектор нормального ускорения направлен по радиусу к оси вращения, т.е. от B к A. Выбрав отрезок РаB (в мм), изображающий ускорение точки B, подсчитываем масштабный коэффициент плана ускорений (в м/с2мм)
μа = аB/![]() PaB = 36.9/180*3.14 = 0.065 м/с2/мм
PaB = 36.9/180*3.14 = 0.065 м/с2/мм
Отрезок PaB выбираем произвольно, но так, чтобы μа получилось числом, удобным для счета.
Определим ускорение точки С. Звено ВC совершает плоское движение. Поэтому ускорение любой точки этого звена может быть представлено как геометрическая сумма ускорения полюса и ускорения в движении относительно полюса. Приняв за полюс точку B, ускорение которой уже известно, имеем
aC = aB + aCBτ + aCBn
aCBn=VСB2/ВС=0.2704/0.08=3.38м/с2
Построив план ускорений имеем:
aCBτ=8.775 м/с2 и aС =6.5 м/с2
Аналогично находим ускорение точки Е и D:
aЕ = 8.255 м/с2
aD = aE + aDEτ + aDEn
aDEτ=5 м/с2
aDEn= VDE2/DE=906.21*10-3/115*10-3=5.6 м/с2
aD =9.42 м/с2
По приведенным выше формулам, построив план ускорений, производим расчет ускорений точек звеньев механизма в зависимости от значения угла φ. Результаты измерений и вычислений заносим в таблицу 1.3.
Tаблицa 1.3
| ab, м/с2 |
|
| ac, м/с2 |
|
|
|
| ad, м/с2 | ae, м/с2 |
| 36.9 | 0 | 36.9 | 6.5 | 3.38 | 6.5 | 5.6 | 5 | 9.42 | 8.255 |
При помощи плана скоростей определяем угловое ускорение звеньев. Результаты вычислений заносим в таблицу 3.1
|
|
|
|
| 1.42 | 0.05 | 0.08 |
 ;
;

 ;
;
Таблица 1.4 Рассчитанные значения угловых ускорений
| aS1, м/с2 | aS2, м/с2 | aS3, м/с2 | aS4, м/с2 | aS5, м/с2 |
| 5.85 | 8.255 | 7.8 | 4.68 | 3.25 |
Похожие работы
... H 14 23,4 22 R, H 14 24,2 11,8 1 22,2 2. Расчет элементов кинематических пар на прочность. 2.1. Определение внешних сил, действующих на звенья. В результате динамического анализа плоского рычажного механизма определены внешние силы, действующие на звенья и кинематические пары. Такими внешними усилиями являются силы инерции F , моменты инерции M , а также реакции ...
... длину вектора и переведем ее обратно: = 79 мм = 2370 Н 2. ПРОЕКТНЫЙ РАСЧЕТ ЗВЕНЬЕВ МЕХАНИЗМА НА ПРОЧНОСТЬ 2.1 Выбор расчетной схемы В результате динамического анализа плоского рычажного механизма были определены внешние силы, которые действуют на каждое звено и кинематическую пару. Такими внешними силами являются силы инерции , моменты инерции и реакции в кинематических парах R. Под ...
... 5000 мг/л. Наличие этих загрязнений препятствует повторному использованию сточных вод, а их сброс ведёт к загрязнению водоёма [17]. 11.3.2 Мероприятий по защите окружающей среды Технологические процессы литейного производства сопровождаются образованием огромных количеств различных пылей и газов, которые загрязняют атмосферу. Отвалы отработанных смесей и неочищенные сточные воды, сбрасываемые ...
... с грузовыми вспомогательных операций, изменение последовательности обработки грузовых помещений). Непосредственными организаторами выполнения ТПГОС в части подготовки и организации погрузочно-разгрузочных работ, а также производства вспомогательных операций, выполняемых портом, являются старший стивидор и подчиненные ему сменные стивидоры; в части прочих операций комплексного обслуживания судна — ...
0 комментариев