Навигация
Расчет и проектирование привода лебедки
38136
знаков
7
таблиц
14
изображений
Министерство сельского хозяйства и продовольствия Республики Беларусь
УО «Белорусская государственная сельскохозяйственная академия»
Расчетно-пояснительная записка
к курсовому проекту по «Деталям машин и основам конструирования»
Тема: Расчет и проектирование привода лебедки
Выполнил:
студент гр.
специальность
Проверил:
2009
Содержание
Введение
1. Кинематический и силовой расчет
2. Расчет косозубой передачи
3. Расчет шевронной передачи
4. Расчет валов редуктора
5. Расчет и конструирование подшипниковых узлов
6. Подбор и проверочный расчет шпонок
7. Определение конструктивных размеров зубчатой передачи
8. Определение конструктивных размеров корпуса
9. Определение конструктивных размеров крышек подшипников
10. Выбор масла, смазочных устройств
16. Выбор и проверочный расчет муфт
17. Сборка редуктора
18. Техника безопасности
Список использованной литературы
Введение
В создании материально-технической базы значительная роль отводится подъемно-транспортному машиностроению, перед которым поставлена задача широкого внедрения во всех областях народного хозяйства комплексной механизации и автоматизации производственных процессов, ликвидации ручных погрузочно-разгрузочных работ и исключения тяжелого ручного труда при выполнении основных и вспомогательных производственных операций. Современные поточные технологические и автоматизированные линии, межцеховой и внутрицеховой транспорт, погрузочно-разгрузочные операции органически связаны с применением разнообразных грузоподъемных машин и механизмов, обеспечивающих непрерывность и ритмичность производственных процессов.
Правильный выбор грузоподъемного оборудования является основным фактором нормальной работы и высокой эффективности производства. Нельзя обеспечить устойчивый ритм производства на современной ступени его интенсификации без согласованной и безотказной работы современных средств механизации внутрицехового и межцехового транспортирования сырья, полуфабрикатов и готовой продукции на всех стадиях обработки и складирования. Успешно осуществляется переход от применения отдельных видов подъемно-транспортной техники к внедрению высокопроизводительных комплексов. Создаются принципиально новые системы грузоподъемных машин для комплексной механизации и автоматизации погрузочно-разгрузочных, транспортных и складских работ. Современные высокопроизводительные грузоподъемные машины, имеющие высокие скорости и большую грузоподъемность, появились в результате постепенного совершенствования машин в течение долгого времени.
В грузоподъемных машинах применяют электропривод с двигателями постоянного и переменного тока. Основным преимуществом двигателей постоянного тока является возможность регулирования скорости в широких пределах и получения механических характеристик, наиболее полно удовлетворяющих требованиям, предъявляемым к работе грузоподъемных машин. Кроме того, двигатели постоянного тока обладают большей перегрузочной способностью и более напряженным режимом работы.
Электропривод с двигателем переменного тока по сравнению с приводом постоянного тока обладает более низкой стоимостью и меньшими затратами при эксплуатации, вследствие более простой и надежной конструкции. Кроме того, электродвигатели переменного тока получают электроэнергию непосредственно из сети, а для электродвигателей постоянного тока требуются индивидуальные или цеховые преобразовательные устройства.
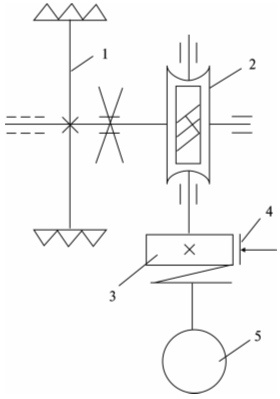
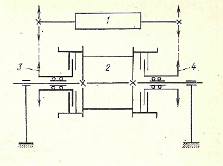
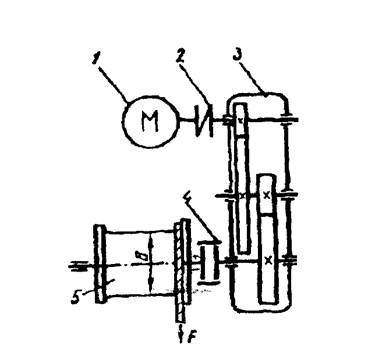
Примерный вид привода лебедки приведен на рис.1
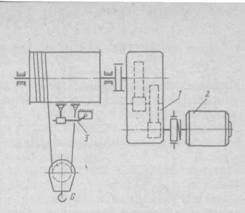
Рис.1 Примерная схема привода лебедки
где: 1-двухступенчатый редуктор, 2-электродвигатель, 3-ограничитель подъема.
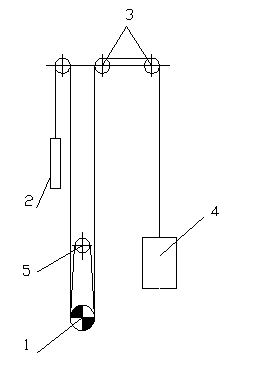
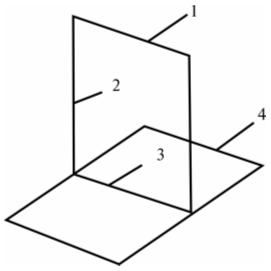
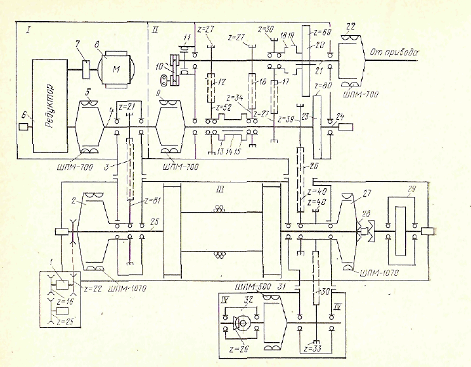
Кинематическая схема заданного привода лебедки приведена на рис.2.
Вращение привода передается от вала электродвигателя 1 к выходной муфте 4 через входную муфту 2 и двухступенчатый редуктор 3.
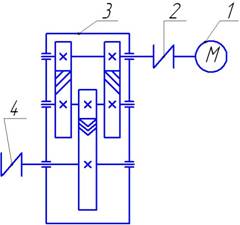
Рис.2 Кинематическая схема привода лебедки.
1. Кинематический и силовой расчет
Исходные данные:
- вращающий момент на выходном валу Т3=1260Нм;
- угловая скорость выходного вала ω3=4с-1;
Определяем мощность на выходном валу Р3= Т3х ω3=1260х4=5040Вт.
Определяем общий КПД привода по схеме привода
ηобщ=ηкп ηшп ηм ηп (1.1)
где [1, с.5, табл.1.1]: ηкп=0,97- КПД косозубой передачи;
ηшп=0,97 - КПД шевронной передачи;
ηм=0,982 – потери в муфтах;
ηп=0,993- коэффициент, учитывающий потери на трение в подшипниках 3-х валов.
Сделав подстановку в формулу (2.1) получим:
ηобщ.=0,97*0,97*0,982*0,993=0,877
Определяем мощность, необходимую на входе [1,с.4]
Ртр=Р3/ηобщ. (1.2)
где Ртр – требуемая мощность двигателя:
Ртр=5,04/0,877=5,75кВт
Выбираем электродвигатель [1,с.390,табл. П1,П2]
Пробуем двигатель 4А132М6У3:
Рдв.=7,5кВт;
nс=1000об/мин;
S=1,3%
dдв.=38мм.
Определяем номинальную частоту вращения электродвигателя по формуле (1.3) [1,c.6]:
nном=nc·(1-S); nном=1000·(1-0,013);
nном=870 об/мин
По формуле (2.4) определяем угловую скорость вала двигателя
ωдв=πnдв/30=π*870/30=91,1рад/с;
Определяем общее передаточное число привода
U=ωдв./ω3=91,1/4=22,8
Производим разбивку передаточного числа по ступеням. По схеме привода
Uобщ.=U1· U2; (1.3)
Назначаем по рекомендации [1,табл.1.2]:
U1=5;
тогда
U2= Uобщ./U1;
U2=4,56, что входит в рекомендуемые пределы
Принимаем U2=4,5.
Тогда уточняем передаточное число привода по формуле (2.3):
Uобщ.=5х4,5=22,5
Принимаем окончательно электродвигатель марки 4А136М6 с dвых=38мм.
Угловые скорости определяем по формуле
ω=πn/30 (1.4)
По схеме привода (рис.2) и формуле (1.4) определяем частоты вращения и угловые скорости каждого вала
n1= nдв
n2= nдв/U1=870/5=174об/мин;
ω2=πn2/30=π*174/30=18,2 рад/с;
n3= n2/U2=174/4,5=38,7 об/мин;
ω3=πn3/30=π*38,7/30=4 рад/с.
Определяем мощность на каждом валу по схеме привода
Р1=Рдв ηм=7,5*0,98=7,35 кВт;
Р2=Р1 ηкп ηп=7,35*0,97*0,992=7,06 кВт;
Р3=Р2 ηшп ηп =7,06*0,97*0,99=6,78 кВт.
Определяем вращающие моменты на каждом валу привода по формуле
![]() (Нм) (1.5)
(Нм) (1.5)
 ;
;
 ;
;
 ;
;
 .
.
Все рассчитанные параметры сводим в табл.1.
Параметры кинематического расчета Таблица 1
| № вала | n, об/мин | ω, рад/с | Р, кВт | Т, Нм | U | |
| Дв | 870 | 91,1 | 7,5 | 82,3 | ||
| 1 | 870 | 91,1 | 7,35 | 80,7 | 5 | |
| 2 | 174 | 18,2 | 7,06 | 388 | ||
| 4,5 | ||||||
| 3 | 38,7 | 4 | 6,78 | 1964 |
2. Расчет косозубой передачи
2.1 Исходные данные
Мощность на валу шестерни и колеса Р1=7,35 кВт
Р2=7,06 кВт
Вращающий момент на шестерне и колесе Т1=80,7 Нм
Т2=388 Нм
Передаточное число U=5
Частота вращения шестерни и колеса n1=870 об/мин
n2=174 об/мин
Угловая скорость вращения шестерни и колеса ω1=91,1 рад/с
ω3=18,2 рад/с
Угол наклона зубьев β1=13˚
Расположение колес относительно опор симметричное.
Похожие работы


... эксплуатации канавки шкивов подвергаются усиленному износу. Для восстановления нормальной формы ручья производят периодическую проточку шкивов. Для удобства ремонта и замены обод шкива может быть съемным. 2. Расчет механизма подъема монтажного крана 2.1 Выбор каната рис.10. схема запасовки монтажного каната Îïðåäåëèì ìàê&# ...
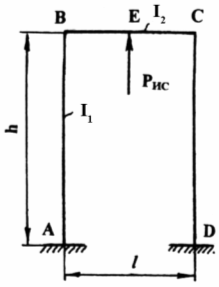
... в заделке (точка В) и момента в точке приложения нагрузки от канатной подвески (точка Е) (2.5) В реальных конструкциях лифтов величина Км ≥ 10, поэтому доля влияния моментов в узлах соединения балок со стойками очень мала, что делает вполне оправданным упрощенный расчет балок и стоек каркаса. 2.1.3 Устройство и расчет пола кабины Горизонтальная рама каркаса ...
... соединения с двигателем в случае индивидуального привода ротора. Подшипники смазываются через тавотницы 2 и 5. Рисунок 2.2 Вал привода ротора в сборе 2. Расчетная часть 2.1 Расчет и выбор параметров буровой лебедки К основным параметрам буровых лебедок относятся мощность, скорости подъема, тяговое усилие, длина и диаметр барабана лебедки. От правильного выбора указанных параметров ...

... значение Тпик не задано, его определяют по формуле Тпик = КТmах, где К— коэффициент внешней динамической нагрузки, принемаемый равным 1,5…2,5. Аналогично, максимальные напряжения изгиба 5. Проектирование тихоходного вала редуктора. 5.1. Предварительный расчет Выполняется из условия расчета на кручение по заниженным допускаемым напряжениям кручения [] кр = 12…20 МПа, т.е. без учета ...
0 комментариев