Навигация
Расчет шагового механизма
29023
знака
1
таблица
4
изображения
3. Расчет шагового механизма
Шаговый механизм, применяемый в программном механизме, обеспечивает дискретное вращение вала, на котором закреплено храповое колесо, с заданной частотой. Шаговый механизм, как было сказано выше, состоит из следующих частей:
- Электромагнит.
- Храповое колесо.
- Толкающая собачка, закрепленная на якоре.
- Стопорная собачка.
3.1 Выбор электромагнита
Сначала определим момент на входном валу по известному выходному моменту:
Момент на валу, на закреплен кулачок с учетом потерь на трение в шарикоподшипниках
![]() (3.1.1)
(3.1.1)
с учетом двух пар подшипников ![]() , получаем:
, получаем:
![]() Н мм.
Н мм.
Теперь определим нормальную силу на червячном колесе:
![]() =2*45.(0.5*100*cos2.52*cos20)=1.89 Н. (3.1.2)
=2*45.(0.5*100*cos2.52*cos20)=1.89 Н. (3.1.2)
Поправочный коэффициент е находим по графику 3.12 [4], при ![]() =1.89 Н е=0.7. КПД червячной пары определим по графику 3.15 [4] (
=1.89 Н е=0.7. КПД червячной пары определим по графику 3.15 [4] (![]() , f=0.15) :
, f=0.15) :
![]() .
.
С учетом поправочного коэффициента получаем:
![]() .
.
Далее находим момент на ведущем червяке:
![]() =45.(100*0.14*.0.98)=3.2 Н мм.(3.1.3)
=45.(100*0.14*.0.98)=3.2 Н мм.(3.1.3)
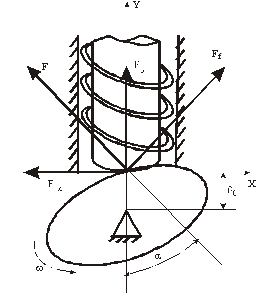
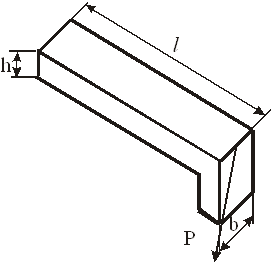
Отсюда – момент, который должен обеспечивать электромагнит, определяем из соотношения плеч ярма электромагнита (см. рис. 1.):
![]() (3.1.4)
(3.1.4)
Принимая для определенности ![]() =2/1 (учитывая влияние этого отношения на величину хода толкающей собачки, а в конечном счете и на величину шага зубьев храпового колеса), находим:
=2/1 (учитывая влияние этого отношения на величину хода толкающей собачки, а в конечном счете и на величину шага зубьев храпового колеса), находим:
![]() =6.4 Н мм.
=6.4 Н мм.
Возьмем (из конструктивных соображений) ![]() =40 мм. Тогда минимальное усилие, развиваемое электромагнитом будет:
=40 мм. Тогда минимальное усилие, развиваемое электромагнитом будет:
![]() =6.4/40=0.16 Н.(3.1.5)
=6.4/40=0.16 Н.(3.1.5)
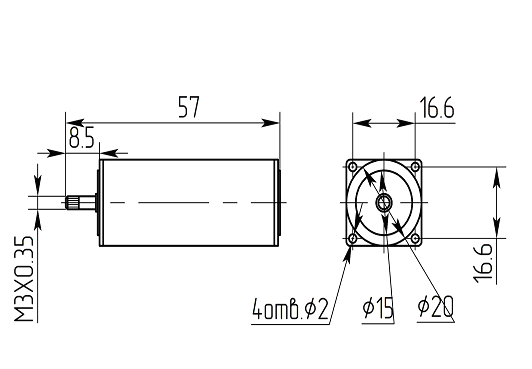
Руководствуясь полученным значением, выбираем электромагнит от реле РКН (паспорт РС3.259.007), имеющего следующие параметры:
- Ток в обмотке 0.15 А.
- Мощность (при 50 Гц) 0.25 Вт.
- Максимальная сила 6 Н.
- Величина зазора 1мм.
- Габариты : диаметр 20 мм, длина 65 мм.
3.2 Расчет храпового колеса
По формуле
![]() (3.2.1)
(3.2.1)
где t – шаг зубьев храпового колеса. По рис.1:
![]() (3.2.2)
(3.2.2)
определим величину модуля храпового колеса.
![]() =1*2/(3.1415*1)0.6.
=1*2/(3.1415*1)0.6.
Согласно нормали станкостроения Н22-4 выбираем храповое колесо со следующими параметрами:
- Модуль m=0.6
- Высота зуба h=0.8 мм.
- Угол впадины =55
- Угол головки собачки =50
- Радиусы закруглений впадин зубьев 0.3 мм.
Определим диаметр храпового колеса
![]() (3.2.3)
(3.2.3)
![]() =58*0.6=34.8 мм.
=58*0.6=34.8 мм.
Диаметр впадин храпового колеса
![]() (3.2.4)
(3.2.4)
![]() =34.8-2*0.8=33.2 мм.
=34.8-2*0.8=33.2 мм.
Шаг зубьев храпового колеса
![]() (3.2.5)
(3.2.5)
t=34.8*3.14.582 мм.
4. Расчет кулачкового механизма
Форма профиля кулачка определяет программу, согласно которой будет происходить движение толкателя. Исходными данными для расчета профиля кулачка являются: ход толкателя Smax=7 мм, который определяет величину перемещения выходного звена (толкателя) и закон движения последнего – линейный.
Похожие работы
... . Р1=Рcosa,(36) Р1 – движущая сила, используемая для преодоления сил полезных сопротивлений: Р из Т.3=6 Н. Р1=5,66 Н. Fтр=0,55 H< Р1=5.66 H. Из этого следует, что толкатель при работе программного механизма не заклинит, и он будет двигаться по поверхности кулачка и отвечать заданной программе. Таким образом, конструкция спроектированного кулачка и толкателя соответствует требуемым ...
... 5 установить в опоры скольжения корпуса поз.11. 7. Установить крышку поз12 и прикрутить ее винтами поз.15 и штифтами поз.20. Заключение В курсовом проекте спроектирован редуктор программного механизма. Все требования удовлетворены, и поставленные задачи выполнены. Достигнута необходимая точность работы устройства. В конструкции имеются унифицированные детали. Использованы типовые методы ...
... территорий, а также являются базисом для создания эффективных инструментов политики, особенно для регионального развития. Функционирование программных механизмов в российских условиях. Проблемы социально-экономического развития регионов носят масштабный характер. В перспективе возможно, что Россия, как и другие страны, будет одновременно внедрять макро-, микро- и координационную политику для ...
вляет собой четырёхступенчатый редуктор. Привод механизма осуществляется электродвигателем серии ДПМ-20 переменного тока, широко применяющегося в системах автоматики. В данном курсовом проекте программный механизм приводится в действие от электродвигателя постоянного тока серии ДПМ (тип двигателя из условия ДПМ-20). Распределение передаточных отношений производится с учетом получения минимальных ...
0 комментариев