Навигация
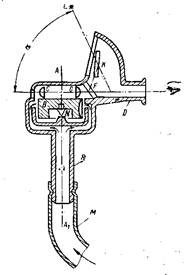
Механизм насоса с качающейся кулисой
19781
знак
2
таблицы
1
изображение
Содержание
Введение
1 Синтез и анализ рычажного механизма
1.1 Структурный анализ механизма
1.2 Определение недостающих размеров
1.3 Определение скоростей точек механизма
1.4 Определение ускорений точек механизма
1.5 Диаграммы движения выходного звена
1.6 Определение угловых ускорений и скоростей
1.7 Определение ускорений центров масс звеньев механизма
1.8 Аналитический метод расчёта механизма
2 Силовой расчет рычажного механизма
2.1 Определение сил инерции
2.2 Расчет диады 4-5
2.3 Расчет диады 2-3
2.4 Расчет кривошипа
2.5 Определение уравновешивающей силы
2.6 Определение мощностей
2.7 Определение кинетической энергии и приведенного момента инерции механизма
3 Геометрический расчет зубчатой передачи. Проектирование планетарного механизма
3.1 Геометрический расчет зубчатой передачи
3.2 Определение передаточного отношения планетарной ступени и подбор чисел зубьев колес
3.3 Определение частот вращения зубчатых колес
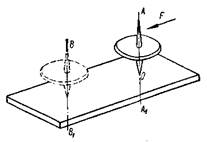
4 Синтез и анализ кулачкового механизма
4.1 Диаграммы движения толкателя
4.2 Определение минимального радиуса кулачка
4.3 Построение профиля кулачка
Список использованных источников
Введение
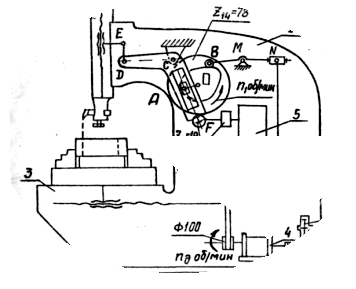
Механизм насоса с качающейся кулисой применяется в нефтеперерабатывающей промышленности и предназначен для откачки жидкости нефтяных скважин.
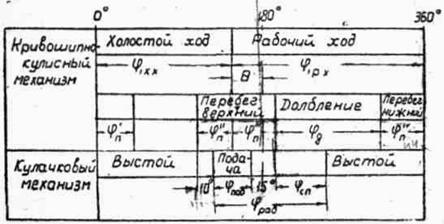
Подача жидкости регулируется автоматически за счёт кулачкового механизма.
Поршень получает возвратно-поступательное движение в цилиндре от электродвигателя через планетарный редуктор и рычажный механизм О1АО2С.
При движении поршня вверх осуществляется рабочий ход, при движении поршня вниз - холостой.
При рабочем ходе на поршень 5 действует сила полезного сопротивления.
Механизм насоса с качающейся кулисой - одностороннего действия.
Кулачок 6 получает вращение посредством зубчатой передачи z5-z6.
1. Синтез и анализ рычажного механизма
Схема механизма:
Исходные данные:
Q=3450 H
H=240 мм
m3=42 кг
K=1,6
m5=35 кг
nкр=150 об/мин
O1O2=625 мм
nдв=1500 об/мин
1.1 Структурный анализ механизма
Степень подвижности механизма определим по формуле:
W=3n-2p1-p2;
Где n- число подвижных звеньев,
P1- число одноподвижных кинематических пар,
P2- число двуподвижных кинематических пар,
W=3·5-2·7-0=1
Разложение механизма на группы Ассура:
Формула строения механизма: I(0,1)→II(2,3)→II(4,5)
Механизм II класса, 2 порядка
1.2 Определение недостающих размеров
Угол размаха кулисы
b=180![]() = 180∙(1,6–1)/(1,6+1)=41,53
= 180∙(1,6–1)/(1,6+1)=41,53
Длину кривошипа определяем по формуле:
lO1A=0102 ∙sin![]() =0,625∙sin20,76=0,22м,
=0,625∙sin20,76=0,22м,
Длину lO2В определим по следующей формуле:
lO2В= =0,24/2∙0,354=0.338 м,
=0,24/2∙0,354=0.338 м,
Выберем масштабный коэффициент

Строим 12 планов положений механизма, приняв за начало отсчета крайнее положение, соответствующее началу рабочего хода механизма.
1.3 Определение скоростей точек механизма
Определяем u точки А кривошипа:
uA=w1lO1A
где w1-угловая скорость вращения механизма, определяется по формуле:
w1=![]() =
=![]() рад/с,
рад/с,
Скорость точки А определим по формуле:
uA=ω1 O1A=15,71∙0,22=3,46 м/с,
План скоростей строим в масштабе:
ku=![]() =3,46/69,2=0.05 м∙с-1/мм
=3,46/69,2=0.05 м∙с-1/мм
Скорость точки A’ находим графически, решая совместно систему:

uA’= ku РuA’
По свойству подобия определяем скорость точки C’:

РVc’=136∙33/280=16мм
Абсолютное значение скорости точки
C’= ku puC’=0.05*17=0,85м/с
Составим систему уравнений скоростей для нахождения u в точке C:
uс’=uc’+ucc’
uc’=uc’c+uc’c
На плане puC=19мм. Абсолютное значение u в точке C:
uC= ku puC=0.05*19=0,95м/с.
Для остальных 11 положений скорости определяются аналогично, их значения приведены в таблице 1.1
Таблица 1.1 - Значения скоростей
| Скорости, м/с | Положение механизма | |||||||||||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | |
| uА | 3,46 | 3,46 | 3,46 | 3,46 | 3,46 | 3,46 | 3,46 | 3,46 | 3,46 | 3,46 | 3,46 | 3,46 |
| uА’ | 1,65 | 2,95 | 3,4 | 3,4 | 3 | 2,15 | 0,7 | 1 | 2,9 | 3,15 | 1,7 | 0 |
| uC | 0,95 | 1,2 | 1,23 | 1,24 | 1,18 | 0,96 | 0,38 | 0,7 | 2,23 | 2,48 | 1,18 | 0 |
| uC’ | 0,85 | 1,24 | 1,29 | 1,26 | 1,18 | 0,96 | 0,37 | 0,65 | 2,14 | 2,42 | 1,16 | 0 |
Похожие работы



... . Для движения резца используется шестизвенный кривошипно-кулисный механизм с качающейся кулисой, состоящий из кривошипа 1, камня 2, кулисы 3, поводка 4 и ползуна 5 (рис.1-2). Рис. 2. Схема кривошипно-кулисного механизма движения резца и кулачкового механизма подачи стола долбежного станка. Ход ползуна Н выбирается в зависимости от длины lд обрабатываемой поверхности с учетом перебегов lп в ...
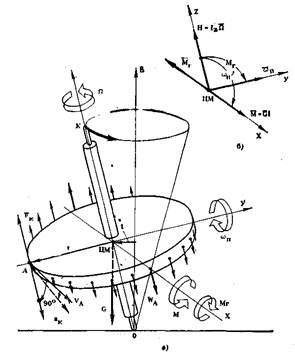
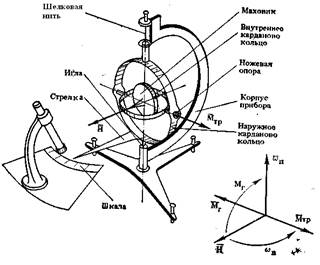
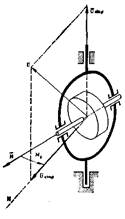
... выполнении авиационных гироскопических указателей поворотов, на рис.21 показана одна из современных моделей прибора с питанием от постоянного электрического тока напряжением 27 в. 7.4. Авиационный гироскоп направления Несмотря на то, что гироскопический указатель поворотов позволяет выдерживать прямолинейный полет и совершать правильные развороты самолета, пользование одним этим прибором ...


... через угловой рычаг передается движение ножу. У сенокосилки, кроме передачи к ножам, при помощи этих механизмов происходит подъем пальцевых брусьев. Цепная передача Рисунок 9 – Цепная передача Цепи в основном делятся на два вида — кольцевые и пластинчатые. Обыкновенные кольцевые цепи обычно применяются для поднятия грузов, а пластинчатые как для поднятия грузов, так и для передачи ...
... удобрений В комплексе мероприятий по внедрению интенсивных технологий большое значение имеет повышение плодородия почв за счёт внесения удобрений и химических мелиорантов. Из жидких минеральных удобрений в сельском хозяйстве используют аммиачную воду (водный аммиак), жидкий (безводный) аммиак, углеаммиакаты и жидкие комплексные удобрения. Жидкий аммиак вносят агрегатами АБА-0,5М и АША-2. ...
0 комментариев