Навигация
Механизм качающегося конвеера
17640
знаков
7
таблиц
5
изображений
Оглавление
Оглавление
1 СТРУКТУРНЫЙ АНАЛИЗ МЕХАНИЗМОВ
1.1 Структурный анализ рычажного механизма
1.2 Структурный анализ зубчатого механизма
1.3 Структурный анализ кулачкового механизма
2. ДИНАМИЧЕСКИЙ АНАЛИЗ РЫЧАЖНОГО МЕХАНИЗМА
2.1 Определение скоростей
2.2 Определение приведённого момента инерции звеньев
2.3 Определение приведённого момента сопротивления
3. СИЛОВОЙ АНАЛИЗ РЫЧАЖНОГО МЕХАНИЗМА
3.1 Построение плана скоростей для расчётного положения
3.2 Определение ускорений
3.3 Определение сил и моментов инерции звеньев
3.4 Определение реакций в кинематических парах и уравновешивающей силы методом планов
3.5 Определение уравновешивающей силы методом Жуковского
3.6 Расчёт погрешности 2-х методов
4. ПРОЕКТИРОВАНИЕ КИНЕМАТИЧЕСКОЙ СХЕМЫ ПЛАНЕТАРНОГО РЕДУТОРА И РАСЧЁТ ЭВОЛЬВЕНТНОГО ЗАЦЕПЛЕНИЯ
4.1 Подбор числа зубьев и числа сателлитов планетарного редуктора
4.2 Исследование планетарного механизма графическим и аналитическим способом
1 СТРУКТУРНЫЙ АНАЛИЗ МЕХАНИЗМОВ
1.1 Структурный анализ рычажного механизма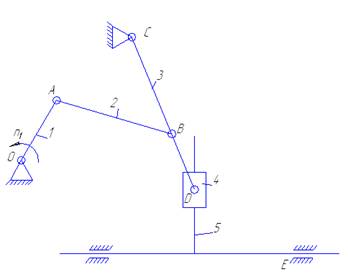
Подвижные звенья механизма.
1-кривошип
2-шатун
3-коромысло
4-кулисный камень
5-кулиса
Рисунок 1.
Кинематические пары. 1
О (0-1),вр.,5 кл.
А (1-2),вр.,5 кл.
В (2-3),вр.,5 кл.
С (0-3),вр.,5 кл.
D (3-4),вр.,5 кл.
D' (4-5),пост.,5 кл.
E (0-5),пост.,5 кл.
Найдём число степеней свободы.
Запишем формулу Чебышева.
W=3∙n-2∙P5-P4 (1.1)
Где: W-число степеней свободы,
n-число подвижных звеньев,
P4 - число пар 4-го класса,
P5 - число пар 5-го класса.
W=3∙5-2∙7=1
Число степеней свободы рычажного механизма равно 1.
Разобьём механизм на группы Асура и
рассмотрим каждую группу в отдельности.
(Рисунок 1.2)
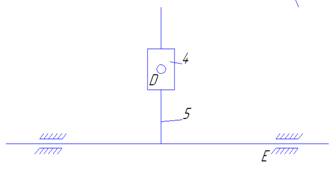
Группа 4-5
E (0-5)-внешняя
D (3-4)-внешняя
D' (4-5)-внутренняя
W=3∙2-2∙3=0
 II кл. 2 вид Рисунок 1.2
II кл. 2 вид Рисунок 1.2
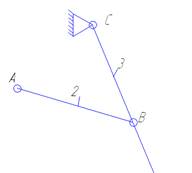
(Рисунок 1.3)
Группа 2-3
А (1-2)-внешняя
В (2-3)-внутренняя
С (0-3)-внешняя
W=3∙2-2∙3=0
 II кл. 1 вид
II кл. 1 вид
Рисунок 1.3
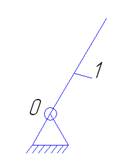
Начальное звено (Рисунок 1.4)
O (0-1)
W=3-2=1
Рисунок 1.4
Составим структурную формулу:
![]()
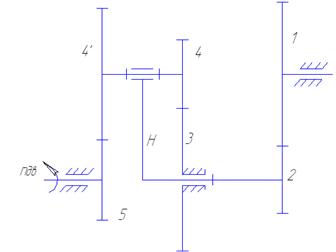
Подвижные звенья механизма.
1 – зубчатое колесо
H – водило
4-4’ – сдвоенный сателлит
5 – центральное колесо
(солнечное)
Кинематические пары.
(1-0),вр.,5 кл.
(2-0),вр.,5 кл.
(4-H),вр.,5 кл.
(5-0),вр.,5 кл.
(1-2),вр.,4 кл.
(3-4),вр.,4 кл.
(4‘-5),вр.,4 кл. Рисунок 1.5
Найдём число степеней свободы.
Запишем формулу Чебышева.
W=3∙n-2∙P5-P4 (1.1)
W=3∙4-2∙4-3=1
Число степеней свободы зубчатого механизма равно 1, следовательно, данный механизм является планетарным.
1.3 Структурный анализ кулачкового механизма Подвижные звенья механизма.
Подвижные звенья механизма.
1-кулачок
2-ролик
3-толкатель
Кинематические пары.
А (1-0),вр.,5 кл.
В (1-2),4 кл.
С (2-3),вр.,5 кл. Рисунок 1.6
D (3-0),пост.,5 кл.
Найдём число степеней свободы.
W=3∙n-2∙P5-P4
W=3∙3-2∙3-1=2
Число степеней свободы равно 2.
W≠1 т.к. присутствует лишнее звено ролик.
Определим число лишних звеньев по формуле:
q=W-W1 где,
q-число лишних звеньев,
W1-число степеней свободы плоского механизма,
W-имеющееся число степеней свободы.
q=2-1=1
Для получения W=1 отбросим лишнее звено и рассмотрим новую схему.

Звенья механизма.
1-кулачок
3-толкатель
Кинематические пары.
А (1-0),вр.,5 кл.
В (1-3),4 кл.
С (0-3),вр.,5 кл. Рисунок 1.7
Найдём число степеней свободы.
W=3∙n-2∙P5-P4
W=3∙3-2∙2-1=1
Число степеней свободы кулачкового механизма равно 1.
Похожие работы
... конвейерной линии; организация и системы ТО и ППР К обслуживанию ленточных конвейеров допускаются лица, прошедшие медицинское освидетельствование с заключением возможности работы на подземных конвейерных установках, обладающие соответствующими навыками и знаниями по обслуживанию и ремонту конвейеров, прошедшие инструктаж по ТБ, техминимум и имеющие право на обслуживание конвейерных установок. ...
0 комментариев