Навигация
Построение планов скоростей
10457
знаков
4
таблицы
11
изображений
4. Построение планов скоростей
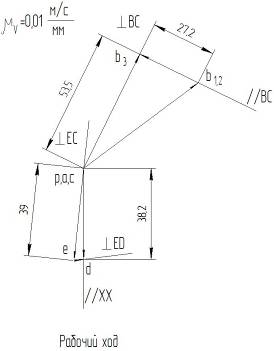
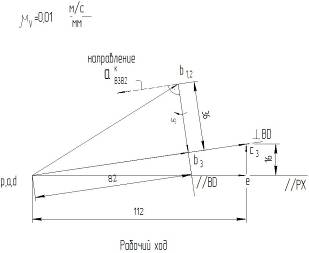
4.1 План скоростей для рабочего хода
VB1 = VB2 = ω1 · l1 = ![]() · l1 =
· l1 = ![]() = 0,6 м/с
= 0,6 м/с
μv = VB1 / (pb1) = 0,6 / 60 = 0,01 ![]()
VB3 = VB2 + VB3B2
VB3 = VC + VB3C
VB3 = (pb3) · μv = 53,5 · 0,01 = 0,535 м/с
VB3B2 = (b2b3) · μv = 27,2 · 0,01 = 0,272 м/с
(ec) = (b3c) · ![]() = 53,5 ·
= 53,5 · ![]() = 39 мм
= 39 мм
VЕ = (ec) · μv = 39 · 0,01 = 0,39 м/с
VD = VE + VDE
VD = (pd) · μv = 38,2 · 0,01 = 0,382 м/с
VDE = (ed) · μv = 4,2 · 0,01 = 0,042 м/с
ω2 = ω3 = VB3 / lBC = 0,535 / 0,38 = 1,4 c-1
ω4 = VDE / lED = 0,042 / 0,17 = 0,25 c-1
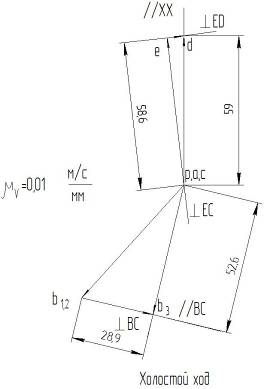
4.2 План скоростей для холостого хода
VB3 = VB2 + VB3B2
VB3 = VC + VB3C
VB3 = (pb3) · μv = 52,6 · 0,01 = 0,526 м/с
VB3B2 = (b2b3) · μv = 28,9 · 0,01 = 0,289 м/с
(ec) = (b3c) · ![]() = 52,6 ·
= 52,6 · ![]() = 58,6 мм
= 58,6 мм
VЕ = (ec) · μv = 58,6 · 0,01 = 0,586 м/с
VD = VE + VDE
VD = (pd) · μv = 59 · 0,01 = 0,59 м/с
VDE = (ed) · μv = 6,7 · 0,01 = 0,067 м/с
ω2 = ω3 = VB3 / lBC = 0,526 / 0,25 = 2,1 c-1
ω4 = VDE / lED = 0,067 / 0,17 = 0,39 c-1
4.3 План скоростей для верхнего крайнего положения
VB3 = (pb3) · μv = 0 · 0,01 = 0 м/с
VB3B2 = VB1 = 0,6 м/с
VD = 0; VE = 0
ω2 = ω3 = 0; ω4 = 0
4.4 План скоростей для нижнего крайнего положения
VB3 = (pb3) · μv = 0 · 0,01 = 0 м/с
VB3B2 = VB1 = 0,6 м/с
VD = 0; VE = 0
ω2 = ω3 = 0; ω4 = 0
5. Построение планов ускорений
5.1 План ускорений для рабочего хода
аВАτ = 0, т.к. ω1 = const.
аВ1 = аВ2 = аВАn = ![]() = ω12 · lBA =
= ω12 · lBA = ![]() · lBA =
· lBA = ![]() · 0,075 = 4,62 м/с2
· 0,075 = 4,62 м/с2
μа = ![]() =
= ![]() = 0,1
= 0,1 ![]()
аВ3 = аВ2 + аВ3В2к + аВ3В2r
аВ3 = аС + аВ3Сn + аВ3Ct
![]() =
= ![]() = 0,2
= 0,2
аВ3В2к = 2 · ω3 · VB3B2 = 2 · 1,4 · 0,272 = 0,76 м/с2
КВ3В2 = ![]() =
= ![]() · 0,2 = 7,6 мм
· 0,2 = 7,6 мм
nB3C = ![]() =
= ![]() · 0,2 = 7,4 мм
· 0,2 = 7,4 мм
аВ3 = (πb3) · μа = 15,3 · 0,1 = 1,53 м/с2
аВ3Ct = tB3C · μа = 13,4 · 0,1 = 1,34 м/с2
аВ3В2r = rB3B2 · μа = 33,8 · 0,1 = 3,38 м/с2
![]() ; (πе) =
; (πе) = ![]() =
= ![]() = 11,1 мм
= 11,1 мм
аЕ = (πе) · μа = 11,1 · 0,1 = 1,11 м/с2
аD = аE + аDEn + аDEt
nDE = ![]() · μ =
· μ = ![]() · 0,2 = 0,1 мм
· 0,2 = 0,1 мм
аDEn = nDE · μа = 0,1 · 0,1 = 0,01 м/с2
аDEt = tDE · μа = 4,4 · 0,1 = 0,44 м/с2
аD = (πd) · μа = 10,9 · 0,1 = 1,09 м/с2
ε1 = 0
ε2 = ε3 = ![]() =
= ![]() = 3,53 c-2
= 3,53 c-2
ε4 = ![]() =
= ![]() = 2,6 c-2
= 2,6 c-2
ε5 = 0

Похожие работы


... звеньями промежуточного механизма). Звенья 4 и 5 образуют двухповодковую группу Ассура 5 вида (ВПП). В ней внешние кинематические пары: вращательная (3 – 4) и поступательная (5 – 0), внутренняя кинематическая пара – поступательная (4 – 0). Таким образом, механизм долбежного станка образован последовательным присоединением к начальному звену 1 и стойке 0 двух двухповодковых групп Ассура - сначала ...
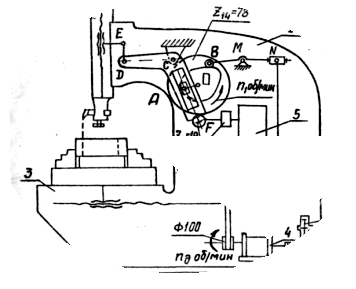



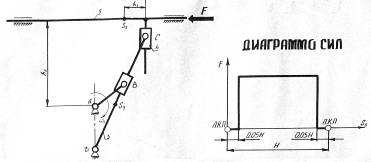
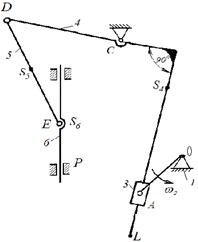
... . Для движения резца используется шестизвенный кривошипно-кулисный механизм с качающейся кулисой, состоящий из кривошипа 1, камня 2, кулисы 3, поводка 4 и ползуна 5 (рис.1-2). Рис. 2. Схема кривошипно-кулисного механизма движения резца и кулачкового механизма подачи стола долбежного станка. Ход ползуна Н выбирается в зависимости от длины lд обрабатываемой поверхности с учетом перебегов lп в ...
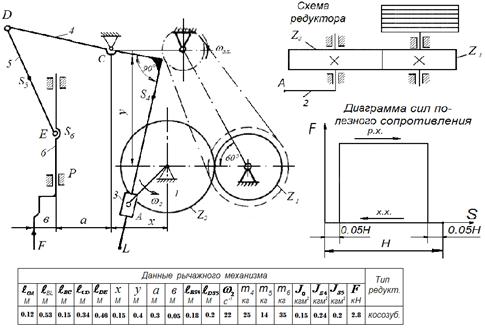
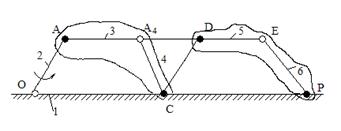
... для него план механизма. Построили диаграмму усилий, действующее на исполнительное звено, и если необходимо, построили 2 плана положений соответствующие началу и концу действия сил полезного сопротивления. Структурный анализ механизма 1. Выписываем кинематические пары определяя класс и вид 1–2 – вращ., 5 кл 2–3 – вращ., 5 кл 3–4 – поступ., 5 кл 4–1 – вращ., 5 кл 4–5 – вращ., 5 кл 5–6 – ...
... б) с точечным формообразующим контактом 1 2 силовое 5 Плоская а) обычная б) с пальцем 3 2 Силовое Силовое и геометрическое 4. СТРУКТУРНЫЕ СВОЙСТВА МЕХАНИЗМОВ 4.1. Сложность N механизма. В металлорежущих станках сложные подвижные механические системы, передающие движения от входного звена к выходному (шпиндель, суппорт и ...
0 комментариев