Обзор литературы и постановка задачи
Описание метода диагностики отказов
Основные принципы диагностики отказов, основанной на использовании моделей
Моделирование систем с отказами
Общая структура формирования рассогласования в диагностике отказов, основанной на моделях
Выявляемость отказов
Фиксирование направления вектора рассогласования
Техники формирования рассогласования
Формирование рассогласований, не чувствительных к возмущениям и ошибкам линеаризации
Проектирование наблюдателей при неизвестном входе
Проверяем условие равенства рангов для Е и СЕ: если ранг(СЕ)≠ранг(Е) наблюдатель не существует, переходим к пункту 10
Схемы надежной изоляции отказов датчиков
Диагностика отказов системы регулирования уровня жидкости в баке
Моделирование датчиков
Проектирование системы диагностики отказов
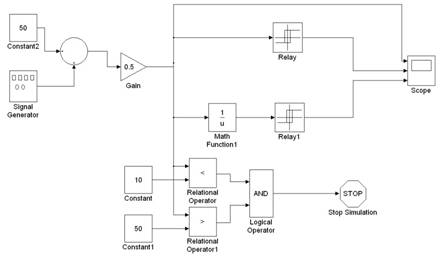
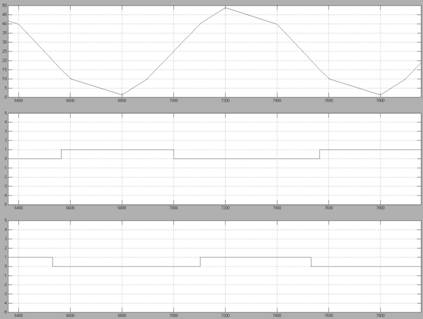
Моделирование отказов в Vissime
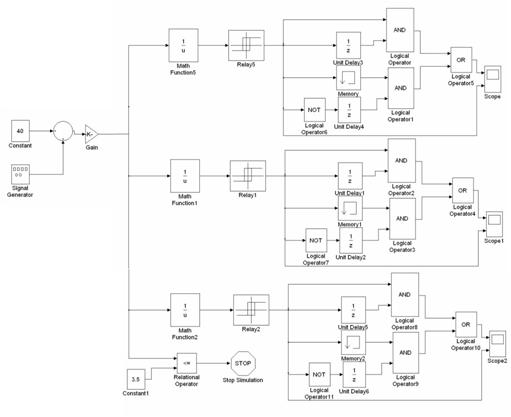
Изоляция отказов
Диагностика отказов с помощью наблюдателей при неизвестном входе
Основные выводы и результаты
Требования к ПЭВМ
Требования к помещениям для работы с ПЭВМ
Пожарная безопасность
Расчет параметров событий сетевого графика
Расчет параметров работ сетевого графика
Расчет стоимостных параметров сетевого графика
Навигация
Диагностика отказов системы регулирования уровня жидкости в баке
Диагностика отказов системы регулирования уровня в баке
135054
знака
16
таблиц
63
изображения
3. Диагностика отказов системы регулирования уровня жидкости в баке
3.1. Постановка задачи
Реализацию описанного выше метода диагностики отказов, основанного на моделях будем выполнять применительно к системе регулирования процессом экстракции (рисунок 3.1).

Рис.3.1. Система регулирования
Рассматриваемая система состоит из регулятора, исполнительного механизма, объекта и датчиков.
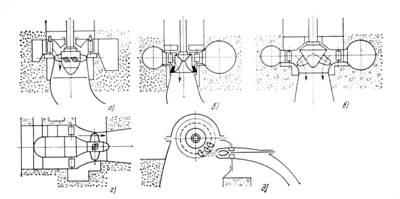
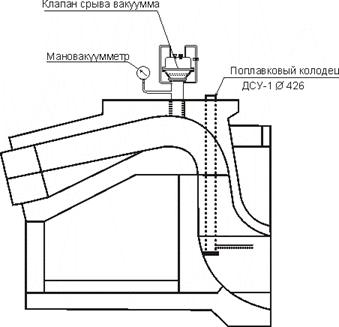
В качестве объекта автоматизации рассматриваем процесс жидкостной экстракции, осуществляемый в смесителях-отстойниках. Смесители-отстойники представим упрощенно в виде двух соединенных между собой баков, изображенных на рисунке 3.2.
В бак 1 поступает жидкость (вода) с известным расходом Q1. Уровень во втором баке необходимо регулировать в соответствии с заданием. Регулирование осуществляется за счет изменения вытекающего из второго бака потока Q3. Поток Q3 изменяется задвижкой, управляемой электроприводом на базе асинхронного двигателя. Величина уровня h2 измеряется датчиком.
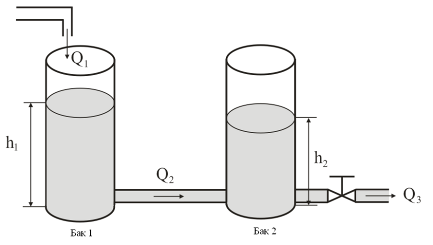
Рис. 3.2. Система двух баков
Необходимо выполнить диагностику отказов элементов этой системы регулирования.
Следовательно, необходимо, на основе рассмотренного выше метода аналитической избыточности, спроектировать систему диагностики отказов, которая бы позволяла выявить и изолировать отказы датчиков, исполнительных механизмов и объекта управления.
3.2. Моделирование элементов системы и отказов
Для решения поставленной задачи в первую очередь необходимо создать модель системы, позволяющую имитировать поведение рассматриваемого процесса. Данная модель так же должна включать модели возможных отказов элементов системы регулирования.
3.2.1. Модель объекта управления
Рассматриваемая система баков (рисунок 3.2) может быть описана следующими уравнениями.
Уравнения материального баланса для баков 1 и 2 имеют вид:
![]() , (3.1)
, (3.1)
![]() , (3.2)
, (3.2)
где S1 = S2 = S = 0.049 м2 – площадь основания цилиндрических баков.
Расход через трубу, соединяющую баки, в соответствии с законом Торичелли определяется по формуле:
![]() , (3.3)
, (3.3)
где ![]() ,
, ![]() - давление воды в 1 и 2 баках соответственно,
- давление воды в 1 и 2 баках соответственно,
γ = 9800 Н/м3 - удельный вес воды,
К1 – коэффициент пропускной способности трубы, соединяющей баки равный K1 = 0.05 м3/час.
Расход через вентиль:
![]() , (3.4)
, (3.4)
где К2 – коэффициент пропускной способности вентиля. К2 регулируется задвижкой и зависит от ее положения – х:
К2(х) = 10∙Кmax∙х . (3.5)
Максимальная пропускная способность вентиля принимается равной
Кmax=0.1 м3/час.
По полученным уравнениям составим модель системы в переменных состояния:
![]() , (3.6)
, (3.6)
![]() ,
, ![]() (3.7)
(3.7)
В качестве переменных состояния будем рассматривать уровни жидкости в баках h1 и h2, входами будем считать расходы ![]() и положение задвижки x:
и положение задвижки x:
 ,
,  . (3.8)
. (3.8)
Таким образом, получим:
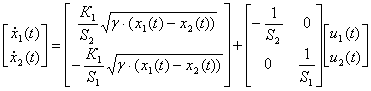 (3.9)
(3.9)
Данная модель является нелинейной.
3.2.2. Модель исполнительного механизма
В качестве исполнительного механизма рассматриваем трехфазный асинхронный двигатель, передаточная функция которого при частотном управлении имеет вид:
![]() (3.10)
(3.10)
где Ким = 1 – коэффициент усиления , T = TМ – электромеханическая постоянная времени двигателя, определяемая следующим образом:
![]() =0,0396 сек, (3.11)
=0,0396 сек, (3.11)
где J=0.0081 кг ∙ м2 – момент инерции ротора,
ω0 = 2 ∙ 3,14 ∙ 50 = 314 рад/сек - синхронная частота,
SМ = 0.4371 – максимальное скольжение,
Ммах = 2,8025 Н ∙ м – максимальный электромагнитный момент.
Похожие работы

... ). Подпрограмма завершена, управление передается назад вызывавшему модулю. 6. Технико-экономическое обоснование 6.1 Пути снижения затрат за счет внедрения системы Внедрение автоматической системы управления маслонапорной установкой гидроэлектростанции решает следующие задачи - Полностью автоматическая система управления маслонапорной установкой не требует участия человека ...
... К. Сатпаева» для просмотра и ввода информации системы оперативно-диспетчерского контроля и управления, создаваемые на Visual Basic. Специфика используемого в системе оперативно-диспетчерского контроля и управления РГП «Канал им. К. Сатпаева» ПО такая, что разработка ПО, как таковая, может производиться только при создании самой системы. Применяемое ПО является полуфабрикатом. Основная задача ...
... его инфраструктуры, а также выполнения международных обязательств по поставкам газа. 1.3 Роль договора в регулировании отношений по поставкам газа Определяя газоснабжение одной из форм энергоснабжения, законодатель ставит перед юристами-практиками трудноразрешимую задачу об определении правовой природы соответствующего договора, поскольку далее указывает, что газоснабжение представляет ...
... изолировать себя от земли (стоять на сухих досках, деревянной лестнице и т.д.). Билет № 4. ИТР ответственные за безопасную эксплуатацию ТПУ и ТС 1. Требования к персоналу. Обучение и работа с персоналом Лица, принимаемые на работу по обслуживанию теплопотребляющих установок и тепловых сетей, должны пройти предварительный медицинский осмотр и в дальнейшем проходить его периодически в ...
0 комментариев