Навигация
1.2 Опис мінімізації БФ
Виписав значення функції з таблиці, одержимо мінімальну диз’юнктивну нормальну форму (МДНФ) і мінімальну кон’юнктивну нормальну форму (МКНФ) булевої функції методом карт Карно. Вибрати для реалізації мінімальну з МДНФ і МКНФ (для цього знайдемо ціну за Квайном) і представимо її відповідно до заданого елементного базису:
МДНФ:
|
х4х5 | 000 | 001 | 011 | 010 | 110 | 111 | 101 | 100 |
|
| Х | 1 | 0 | 0 | 0 | Х | 1 | 1 |
|
| 1 | 1 | 0 | 0 | 1 | Х | Х | 1 |
| 11 | 0 | 1 | 1 | 0 | 1 |
| 0 | 0 |
|
| 0 | 0 | Х | 1 | 1 | Х | 1 | 0 |

 х1х2х3
х1х2х3 00
00
 Х
ХОдержуємо мінімальну диз’юнктивну нормальну форму (МДНФ):
у = ![]()
Для знайденої форми обчислимо ціну за Квайном, яка дорівнює додатку кількості слагаємих, кількості елементів та кількості заперечень.
Цкв. = 25
МКНФ:
| х1х2х3 х4х5 | 000 | 001 | 011 | 010 | 110 | 111 | 101 | 100 |
|
| Х | 1 | 0 |
| 0 | Х | 1 | 1 |
|
| 1 | 1 | 0 | 0 | 1 | Х | Х | 1 |
|
| 0 | 1 | 1 | 0 | 1 | Х | 0 | 0 |
| 10 |
| 0 | Х | 1 | 1 | Х | 1 | 0 |
 00
00
 01
01 11
11Одержуємо мінімальну кон’юктивну нормальну форму (МКНФ):
у = 
Для знайденої форми обчислимо ціну за Квайном, яка дорівнює додатку кількості помножень плюс один, кількості елементів та кількості заперечень.
Цкв. = 39
Виходячи з того, що ціна по Квайну МДНФ функції менше, ніж МКНФ, обираємо для реалізації МДНФ функції. Реалізацію будемо проводити згідно з заданим базисом 2ЧИ-НІ. Застосуємо до обраної форми факторний алгоритм та одержимо скобкову форму для заданої функції:
у = ![]()
у = ![]()
у = ![]()
2. Вибір блоків та структури ГСА
Граф-схеми алгоритмів обираються кожним студентом індивідуально. Граф-схема складається з трьох блоків E, F, G і вершин «BEGIN» і «END». Кожен блок має два входи (A, B) і два виходи (C, D). Студенти вибирають блоки E, F, G з п'яти блоків з номерами 0, 1, 2, 3, 4 на підставі чисел А, В, С за такими правилами:
– блок Е має схему блока під номером (А) mod5;
– блок F має схему блока під номером (В) mod 5;
– блок G має схему блока під номером (С) mod 5.
Блоки E, F, G з'єднуються між собою відповідно до структурної схеми графа, що має вид
– для групи АН-042;
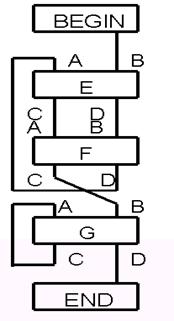
E=05 (MOD5)=0
F=02 (MOD5)=2
G=14 (MOD5)=4
Згідно з номером групи обираємо структурну схему графа, за якою з блоки E, F і G.
Тип тригера вибирається за значенням числа (А) mod 3 на підставі таблиці:
| (A) mod 3 | ТИП ТРИГЕРА | |
| 0 | Т | D |
| 1 | D | JK |
| 2 | JK | T |
| автомат | Мілі | Мура |
A(MOD3)= 05 (MOD3)=2; => JK триггер для автомата Мили, T-триггер для автомата Мура.
Серія інтегральних мікросхем для побудови схем електричних принципових синтезованих автоматів визначається в залежності від парності номера за списком:
– КР1533 – для парних номерів за списком;
3. Синтез автомата Мура на T-тригерахНаш автомат має 18 станів, значить, для його побудови нам необхідно 5 T-тригерів.
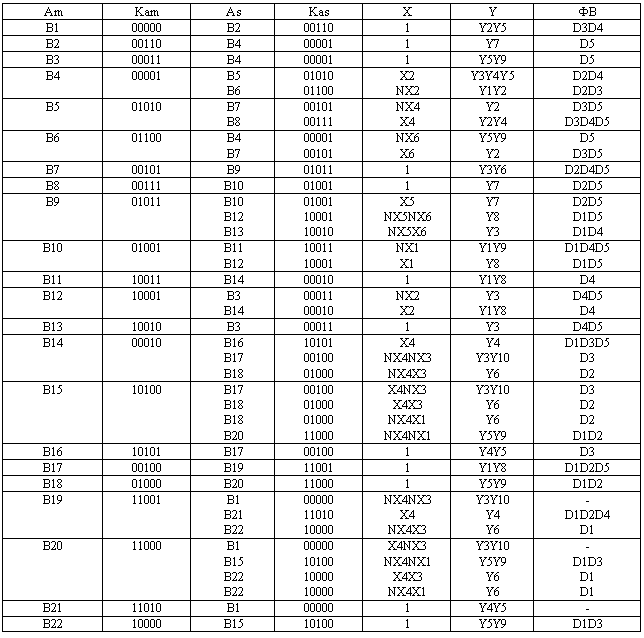
Будуємо таблицю переходів автомата Мура на базі T-тригера. Виконаємо кодування станів керуючого автомата (УА) з використанням відповідного алгоритму кодування для T-триггера. Функцію порушення вихідних сигналів визначимо в залежності від поточного стану та вхідних сигналів згідно з таблицею:
| Qt | Qt+1 | T |
| 0 | 0 | 0 |
| 0 | 1 | 1 |
| 1 | 0 | 1 |
| 1 | 1 | 0 |
Для кодування станів я обираю євристичний метод кодування. Я роблю це за допомогою спеціальной програми під назваю ECODE V3.02.
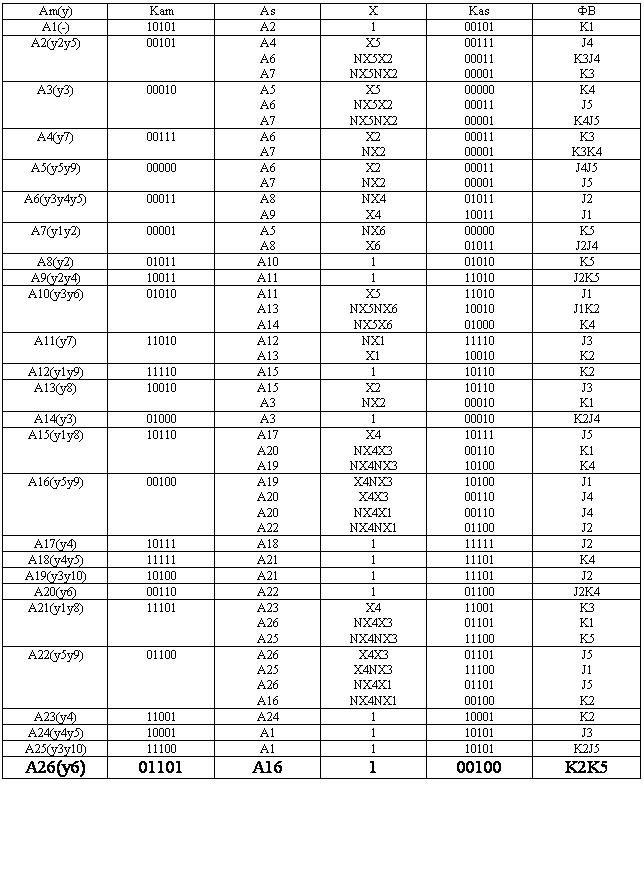
Таблиця для входів та виходів атомата Мура
| am | Kam | as | Kas | Условие перехода | Функция возбуждения |
| а1 (–) | 01100 | а2 | 01110 | 1 | T4 |
| a2 (y1, y4) | 01110 | а5 а7 | 00110 01010 | x3 x3 | T2 T3 |
| a3 (y1, y1) | 00000 | а4 а6 а8 а9 | 01000 00100 00010 00001 | x4 x4 x2 x4 x2 x1 x4 x2 x1 | T2 T3 T4 T5 |
| a4 (y3) | 01000 | а7 | 01010 | 1 | T4 |
| a5 (y7) | 00110 | а8 а9 | 00010 00001 | x1 x1 | T3 T3 T4 T5 |
| a6 (y4, y5) | 00100 | а8 | 00010 | 1 | T3 T4 |
| a7 (y2, y6) | 01010 | а8 | 00010 | 1 | T2 |
| a8 (y1, y8) | 00010 | а10 а13 а12 | 10010 00011 00101 | x4 x4 x3 x4 x3 | T1 T5 T3 T4 T5 |
| a9 (y5, y9) | 00001 | а13 а13 а12 а3 | 00011 00011 00101 00000 | x4 x3 x4 x1 x4 x3 x4 x1 | T4 T4 T3 T5 |
| a10 (y4) | 10010 | а11 | 10011 | 1 | T5 |
| a11 (y4, y5) | 10011 | а15 | 00111 | 1 | T1 T3 |
| a12 (y3, y10) | 00101 | а15 | 00111 | 1 | T4 |
| a13 (y6) | 00011 | а3 | 00000 | 1 | T4 T5 |
| a14 (y1, y3) | 11111 | а14 а16 | 11111 10111 | x2 x2 | – T2 |
| a15 (y2) | 00111 | а17 а16 | 01111 10111 | x5 x5 | T2 T1 |
| a16 (y6) | 10111 | а17 | 01111 | 1 | T1 T2 |
| a17 (y7, y10) | 01111 | а14 а18 | 11111 01101 | x4 x4 | T1 T4 |
| a18 (y2) | 01101 | а1 | 01100 | 1 | T5 |
Для отримання вихідних сигналів:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Виписуємо функцію збудження:
![]()




Знаходимо загальні частини та замінюємо їх на Q:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Переписуємо рівняння згідно з підстановкою:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
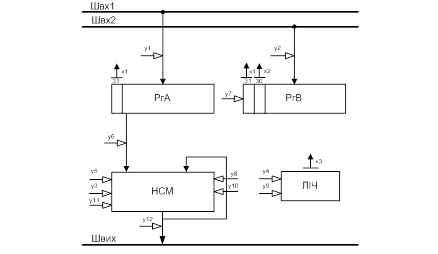
Побудова принципової схеми автомата на елементах малого ступеня інтеграції заданої серії
За допомогою отриманих виразів для вихідних сигналів і функцій порушень до типу логічних елементів, що реалізують ці вирази, та врахував проведену мінімізацію, будуємо принципову схему синтезованого автомата.
Похожие работы
... льш прості операції які називаються мікроопераціями тобто кожна операція – це визначена послідовність мікрооперацій. Існують два основні типи керуючих автоматів 1. Керуючий автомат з жорсткою чи схемною логікою. Для кожної операції будується набір комбінаційних схем які в потрібних тактах збуджують відповідні керуючі сигнали. Іншими словами ...

. 2002 Керівник: Ніколенко А.О. Прийняв до виконання: Ткаченко І.О. Зміст Завдання на розробку Зміст Синтез комбінаційної схеми Розрахування значень Мінімізація БФ Комбінаційна схема Проектування автоматів Вибір завдання Автомат Мура Автомат Мілі Заключення Перелік літератури 1 Синтез комбінаційної схеми 1.1 Визначення значень БФ Булева функція 5 змінних ...
... Таблиця переходів автомата 2.2.3. Кодування станів 2.2.5. Функції збудження тригерів та вихідних сигналів Закінчення Список використаної літератури 1 Введення Метою курсового проекту по дисципліні "Прикладна теорія цифрових автоматів" є закріплення основних теоретичних знань і практичних навичок у ході самостійної роботи. У ході роботи необхідно :1. спроектувати керуючий автомат Милі по ...
... в одному розряді перетворюється в 1, а в другому розряді 1 в 0). 2.4 Управляючий автомат(Каган стр.241 - 243) Будь-який цифровий пристрій складається з двох частин – операційного та управляючого блоків. Операційний блок характеризується сукупністю визначених в ньому мікрооперацій, кожна з яких являє собою деякий виконуваний в даному операційному блоці елементарний акт передачі або перетворення і ...
0 комментариев