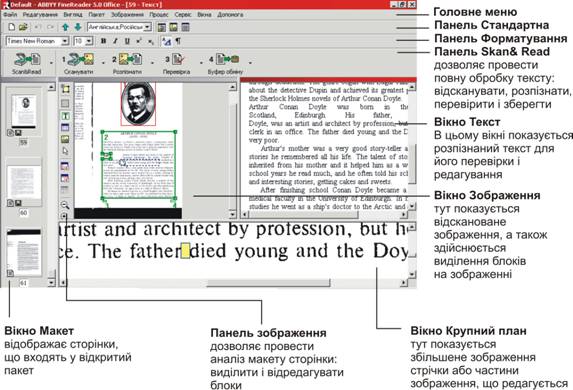
Навигация
ПРИЗНАЧЕННЯ ТА ГАЛУЗЬ ЗАСТОСУВАННЯ
26868
знаков
0
таблиц
6
изображений
1. ПРИЗНАЧЕННЯ ТА ГАЛУЗЬ ЗАСТОСУВАННЯ
Даний курсовий проект призначений для розробки програми обробки зображень.
Цей проект може бути використана для наукових досліджень або може виступати як посібник.
Курсовий проект розроблений на підставі технічного завдання та методичних вказівок до виконання та оформлення курсового проекту .
2. ТЕХНІЧНІ ХАРАКТЕРИСТИКИ
Фільтрація зображеньРеальні зображення поряд з корисною інформацією містять різні перешкоди. Джерелами перешкод є власні шуми фотоприйомних пристроїв, зернистість фотоматеріалів, шуми каналів зв'язку. Нарешті, можливі геометричні перекручування, зображення може бути розфукусовано. Нехай f (x,y) – деяке зображення, х, у – координати. Реальне растрове зображення має кінцеві розміри: A ≤ x ≤ B, C ≤ y ≤ D і складається з окремих пікселів, розташованих з деяким кроком у вузлах прямокутної сітки. Лінійне перетворення зображення можна описати вираженням
![]() (2)
(2)
Вираження (2), де інтегрування ведеться по всій області визначення x і y, характеризує перетворення всього зображення цілком глобальну фільтрацію. Ядро перетворення h1 (x,y,х',у')в оптику іменують функцією розсіювання крапки (ФРТ). Це зображення крапкового джерела на виході оптичної системи, що вже є не крапкою, а деякою плямою. Відповідно до (2), усі крапки зображення f (х',у') перетворюються в плями, відбувається підсумовування (інтегрування) усіх плям. Не слід думати, що ця процедура обов'язково приводить до розфукусування зображення, навпаки, можна підібрати таку ФРТ, що дозволить сфокусувати розфукусоване зображення.
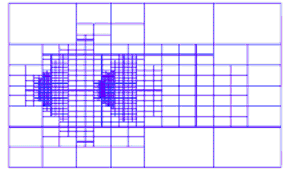
На мал. 5 представлена одна з можливих ФРТ. Узагалі говорячи, ФРТ визначена на ( ∞ < x < ∞), ( ∞ < y < ∞). ФРТ не повинна змінюватися при зміні початку відліку по x і y, для цього вона повинна мати вигляд: h1(x,y,х',у')= =h1(xх', yу'). Крім того, ФРТ повинна мати осьову симетрію. У цьому випадку всі крапки зображення "розпливаються" однаковим образом, рівномірно в усі сторони (принцип просторової інваріантості).
На практиці глобальна фільтрація застосовується рідко. Частіше використовують локальну фільтрацію, коли інтегрування й усереднення проводиться не по всій області визначення x і y, а по порівняно невеликій околиці кожної крапки зображення. Функція розсіювання крапки при цьому має обмежені розміри. Достоїнством такого підходу є гарна швидкодія. Лінійне перетворення приймає вид:
![]() (3)
(3)
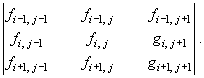
При обробці растрових зображень, що складаються з окремих пікселів, інтегрування замінене підсумовуванням. Найпростіше реалізувати ФРТ кінцевих розмірів у виді прямокутної матриці форматом NN. N може бути рівним 3, 5, 7 і т.д. Наприклад, при N = 3

Підсумовування ведеться по околиці D крапки (i, j); akl значення ФРТ у цій околиці. Яскравості пікселів f у цій крапці й у її околиці збільшуються на коефіцієнти akl, перетворена яскравість (i,j) го пиксела є сума цих добутків. Елементи матриці задовольняють умові просторової інваріантості, тому a11= a13 =a31= a33, a12 = a21= a23 = a32. Тільки три елементи матриці розміром 3х3 незалежні, у цьому випадку матриця інваріантна щодо поворотів, кратних 90˚. Досвід обробки зображень показує, що відсутність більш строгої осьової симетрії ФРТ слабко позначається на результатах. Іноді використовують 8вугільні матриці, інваріантні щодо поворотів на 45˚.
Фільтрація згідно (3) здійснюється переміщенням ліворуч праворуч (або зверху вниз) маски на один пиксел. При кожнім положенні апертури виробляються згадані вище операції, а саме перемножування вагових множників akl з відповідними значеннями яскравості вихідного зображення і підсумовуванням добутків. Отримане значення привласнюється центральному (i,j) му пікселу. Звичайно це значення поділяється на заздалегідь задане число K (нормуючий множник). Маска містить непарне число рядків і стовпців N, щоб центральний елемент визначався однозначно.
Розглянемо деякі фільтри, що згладжують шум. Нехай маска розміром 3х3 має вигляд:
Тоді яскравість (i,j) -го піксела після фільтрації визначиться як
![]()
Хоча коефіцієнти akl можна вибрати зі середньоквадратичного або іншої умови близькості не перекрученого шумом si,j і перетвореного gi,j зображень, звичайно їхній задають евристично. Приведемо ще деякі матриці фільтрів, що придушують шум:

У фільтрів H1 H4 множники, що нормують, K підібрані таким чином, щоб не відбувалося зміни середньої яскравості обробленого зображення. Поряд з масками 3х3 використовуються маски більшої розмірності, наприклад, 5х5, 7х7 і т.п. На відміну від фільтра H2, у фільтрів H1, H3, H4 агарні коефіцієнти на перетинанні головних діагоналей матриці більше, ніж коефіцієнти, що коштують на периферії. Фільтри H1, H3, H4 дають більш плавна зміна яскравості по зображенню, чим H2.
Нехай відліки корисного зображення fk,m мало міняються в межах маски. На зображення накладається аддітівный шум: fk,m + nk,m , відліки шуму nk,m випадкові і незалежні (або слабко залежні) зі статистичної точки зору. У цьому випадку механізм придушення шуму з використанням приведених фільтрів полягає в тому, при підсумовуванні шуми компенсують один одного. Ця компенсація буде відбуватися тим краще, чим більше число членів у сумі, тобто чим більше розмір (апертура) маски. Нехай, наприклад, використовується маска NN, у межах її корисне зображення має постійну яскравість f, шум з незалежними значеннями відліків nk,m, середнім значенням м = 0 і дисперсією у2 у межах маски (такий шум називають білим). Відношення квадрата яскравості (i,j)-го піксела до дисперсії шуму, тобто відношення сигнал/шум, дорівнює f 2/у2.
Розглянемо, наприклад, маску типу H2:

Середній квадрат яскравості дорівнює f 2, середній квадрат інтенсивності шуму

Подвійна сума відповідає k= p, m = q, ця сума дорівнює у2/N 2.Чотириразова сума дорівнює нулеві, тому що відліки шуму при k ≠ p, m ≠ q незалежні: <n k,mn p,q> = 0. У результаті фільтрації відношення сигнал/шум стає рівним N 2f 2/у2, тобто зростає пропорційно площі маски. Відношення яскравості (i,j)-го піксела корисного зображення до середньоквадратичного відхилення шуму зростає пропорційно N. Застосування маски 3х3, у середньому, підвищує відношення сигналу до шуму в 9 разів.
При імпульсній перешкоді механізм придушення полягає в тому, що імпульс "розпливається" і стає мало помітним на загальному тлі.
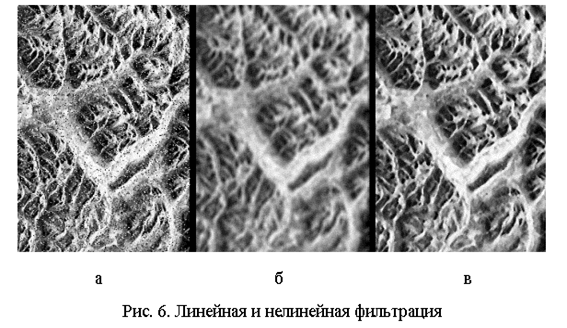
Однак часто в межах апертури значення корисного зображення все-таки змінюються помітним образом. Це буває, зокрема, коли до маски попадають контури. З фізичної точки зору, усі H1 H4 є фільтрами нижніх частот (зсереднюючими фільтрами), що придушують високочастотні гармоніки і шуму, і корисного зображення. Це приводить не тільки до ослаблення шуму, але і до розмивання контурів на зображенні. На мал. 6а показане вихідне зашумлене зображення, результат застосування фільтра типу Н2 приведений на мал. 6б (маска 5х5).
Розглянута вище фільтрація характеризувалася тим, що вихідні значення фільтра g визначалися тільки через вхідні значення фільтра f . Такі фільтри називаються не рекурсивними. Фільтри, у яких вихідні значення g визначаються не тільки через вхідні значення f , але і через відповідні вихідні значення, називаються рекурсивними.
При рекурсивній фільтрації можна зберігати ті ж значення вагових множників, що і приведені вище, існують рекурсивні фільтри зі спеціально підібраними множниками. Елементи вхідного зображення в межах вікна зміняться і приймуть вид:

Вагарні і що нормує множники рекурсивного фільтра залежать від місця розташування маски; рекурсивний локальний фільтр дозволяє враховувати усі вхідні значення фільтруємого зображення, тобто наближається по своїй дії до глобального фільтра.
Для усунення ефекту розмивання контурів при придушенні шуму варто переходити до нелінійної обробки. Прикладом нелінійного фільтра для придушення шуму служить медіанний фільтр. При медіанній фільтрації (i,j)-му пікселу привласнюється медіанне значення яскравості, тобто таке значення, частота якого дорівнює 0,5. Нехай, наприклад, використовується маска 33, у межі якої поряд з більш-менш рівномірним тлом потрапив шумовий викид, цей викид довелося на центральний елемент маски:

Будується варіаційний ряд. Варіаційним рядом V1,..., Vn вибірки f1,..., fn називають упорядковану по не убуванню послідовність елементів вибірки, тобто V1 = min(f1,..., fn), Vn= max (f1,..., fn) і т.д. У нашому випадку варіаційний ряд має вигляд: 63, 66, 68, 71, 74, 79, 83, 89, 212. Тут медіанне значення п'яте по рахунку (підкреслене), тому що всього чисел у ряді 9. При медіанній фільтрації значення 212, перекручене шумовим викидом, заміняється на 74, викид на зображенні цілком подавлений. Результат застосування медіанного фільтра показаний на мал. 6в.
Функція розсіювання крапки для медіанного фільтра є нуль. При розмірах вікна (2k+1)·(2k+1) відбувається повне придушення перешкод, що складаються не більш, ніж з 2(k2 + k) пікселів, а також тих, котрі перетинаються не більш, з k рядками або k стовпцями, При цьому не змінюється яскравість у крапках тла. Зрозуміло, при медіанній фільтрації може відбуватися перекручування об'єкта на зображенні, але тільки на границі або поблизу неї, якщо розміри об'єкта більше розмірів маски. Фільтр має високу ефективність при придушенні імпульсних перешкод, однак ця якість досягається підбором розмірів маски, коли відомі мінімальні розміри об'єктів і максимальні розміри перекручених перешкодою локальних областей.
Виділення контурівЛінійні фільтри можуть бути призначені не для придушення шуму, а для підкреслення перепадів яскравості і контурів. Виділення вертикальних перепадів здійснюється диференціюванням по рядках, горизонтальних по стовпцях. Диференціювання виробляється в цифровій формі:

Тут ∆x=1 ? збільшення уздовж рядка, рівне 1 пікселу,
?y=1 ? збільшення уздовж стовпця, також рівне 1 пікселу.
Виділення перепадів по діагоналі можна одержати, обчислюючи різниці рівнів діагональних пар елементів.
Для виділення перепадів використовуються наступні набори вагових множників, що реалізують двовимірне диференціювання:
Північ північний схід схід південний схід

південь південний захід захід північний захід

Назва географічних напрямків говорить про напрямок схилу перепаду, що викликає максимальний відгук фільтра. Сума вагових множників масок дорівнює нулеві, тому на ділянках зображення з постійною яскравістю ці фільтри дають нульовий відгук.
Виділення горизонтального перепаду можна виконати також шляхом обчислення збільшення різниці яскравості пікселів уздовж рядка, що рівноцінно обчисленню другої похідної по напрямку (оператор Лапласа):
![]()
Це відповідає одномірній масці Н = | 1 2 1|, сума вагових множників дорівнює нулеві. У такий же спосіб можна шукати перепади по вертикалі і по діагоналі. Для виділення перепадів без обліку їхньої орієнтації використовуються двовимірні оператори Лапласа:

Тут сума вагових множників також дорівнює нулеві. На мал. 7 приведене вихідне зображення і результат застосування оператора Лапласа Н13.
Оператори Лапласа реагують на перепади яскравості у виді східчастого перепаду і на "дахоподібний" перепад. Вони також виділяє ізольовані крапки, тонкі лінії, їхні кінці і гострі кути об'єктів. Лінія підкреслюється в 2 рази яскравіше, ніж східчастий перепад, кінець лінії в 3 рази, а крапка у 4 рази яскравіше. Оператор Лапласа не інваріантний до орієнтації перепадів: наприклад, відгук оператора на похилий перепад у діагональному напрямку майже вдвічі більше, ніж у горизонтальному і вертикальному.
З фізичної точки зору, фільтри H5 H15 є фільтрами верхніх частот, вони виділяють високочастотні складові корисного зображення, відповідальні за перепади яскравості і контури і придушують "постійну складову". Однак при їхньому використанні рівень шуму на зображенні зростає.
Фільтри для виділення перепадів і границь, як і фільтри H1 H4 для придушення шуму, можуть бути рекурсивними.
Зображення з підкресленими границями (контурами) суб'єктивно сприймається краще, ніж оригінал. Відбувається фокусування частково розфукусованого зображення. При використанні оператора Лапласа для цих цілей застосовують три типових набори вагарень множників:

H16 H18 відрізняються від фільтрів H13 H15 тим, що до центрального елемента матриці додана 1, тобто при фільтрації вихідне зображення накладається на контур.
Для виділення контурів і перепадів яскравості можуть застосовуватися нелінійні фільтри. У нелінійних алгоритмах використовують нелінійні оператори дискретного диференціювання. У фільтрі Робертса використовується маска, що переміщається 2:

диференціювання виробляється за допомогою одного з виражень
![]()
![]()
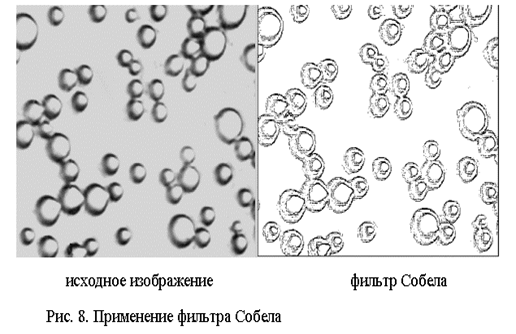
У фільтрі Собела використовується вікно 33:
Центральному (i,j) -му пікселу замість f i,j привласнюється значення яскравості ![]() або
або ![]() , де
, де

На мал. 8 показані результати застосування фільтра Собела.
Похожие работы

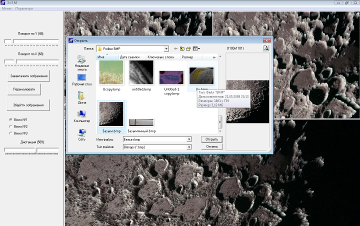
... скануванні у чорно-білому режимі може знадобитися додаткове регулювання параметрів яскравості. РОЗДІЛ ІІ. ІНСТРУКЦІЯ ПО ЕКСПЛУАТАЦІЇ 2.1. Запуск програми, введення початкових даних Перш ніж приступити до роботи з програмою FineReader слід встановити її на комп’ютері. Для цього необхідно оптичний диск із дистрибутивом програми вставити у пристрій читання дисків (CDROM). Натиснути кнопку ...
... отриманого зображення посередня. 5. StitcherUnlimited – ця програма є аналогом попередньої. Переваги та недоліки даної програми такі, як і в попередній. 6. Image Skulpturer - ця програма орієнтована на створення об’ємних зображень з фотографії. До переваг програми можна віднести: простота інтерфейсу; відтворює складні зображення; потребує невелику кількість вхідних параметрів фотографії; ...
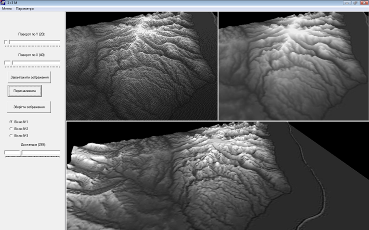
... Рис. 5.9. Наближення зображення З допомогою наближення, у вікні №1, ми можемо побачити сітку згенерованого зображення. У вікні №2 ми можемо побачити об’ємне зображення нашої фотографії без тіней. Найбільш реалістичне зображення ми отримуємо у вікні №3, де на згренероване зображення накладається тінь. Чим більш гостріший кут огляду деякої поверхні, тим більша тінь на даній області відображення.
... або їх множин, що приводить до підвищення валідності процедур вторинної сегментації візуальної інформації. Практичне значення отриманих результатів. Розроблені в дисертаційній роботі моделі мультиграничної сегментації зображень, що засновані на аналізі зв’язку розбиття та покриття поля зору та області значень даних із використанням їх перетворень для пошуку раціонального прикладного трактування, ...
0 комментариев