Основные принципы организации системы прерываний
Аппаратные средства системы прерываний Системный контроллер PIC (Programmable Interrupt Controller)
Контроллер прерываний APIC (Advanced Programmable Interrupt Controller)
Режим прямого доступа к памяти
Распределение ресурсов, технология Plug and Play
Навигация
Режим прямого доступа к памяти
Организация прерываний и прямого доступа к памяти в вычислительных системах, распределение ресурсов, технология Plug and Play
56969
знаков
3
таблицы
7
изображений
6. Режим прямого доступа к памяти
Мы уже знаем, что в вычислительных системах используется два способа организации обмена данными между внешним устройством и памятью.
Первый способ - программируемый ввод-вывод (PIO). В этом режиме ввод и вывод данных осуществляет процессор, используя для пересылки свои внутренние регистры. Процессор читает данные из порта (регистра) внешнего устройства и записывает его в нужную область памяти, или наоборот, читает данные из памяти и передает их внешнему устройству (дисковый накопитель, например). Режим PIO определяет, с какой скоростью данные передаются от диска к памяти и от памяти к диску. В самом медленном режиме - PIO mode 0 - время цикла передачи данных не превышает 600 наносекунд. За один цикл к диску и от диска передаются 16 бит (2 байта). Отсюда следует, что теоретическая скорость передачи данных в режиме PIO Mode 0 - 3.3 мегабайта в секунду.
Обмен между двумя устройствами может производиться по разным протоколам и с разными задержками на выдачу тех или иных сигналов. Существует 5 режимов PIO, управляемых процессором. Старший режим PIO4 позволяет работать со скоростью 16.6 Мбайт/c. Второй способ обмена - прямой доступ памяти (DMA -Direct Memory Access). Прямой доступ к памяти в современных вычислительных системах претерпел значительные изменения. Познакомимся с основными принципами организации прямого доступа к памяти. Для реализации режима прямого доступа к памяти, внешнее устройство должно отправить процессору запрос (поэтому такому устройству должна быть выделена специальная линия запроса прерывания).
Процессор программирует специальный контроллер (контроллер DMA) на обслуживание работы внешнего устройства в режиме прямого доступа к памяти. Он задает адрес памяти, размер передаваемого блока данных, направление передачи (чтение или запись), после чего дает команду на выполнение.
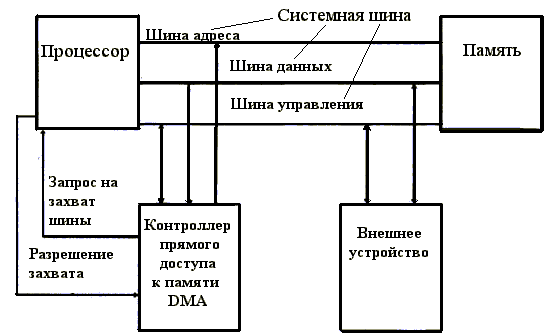
Рис.4. Взаимодействие памяти и внешнего устройства в режиме DMA
Пересылкой данных управляет контроллер DMA. Процессор, в это время, может продолжить выполнение прерванной программы, но доступа к памяти он не имеет и не может вмешаться в процесс обмена, пока контроллер не закончит передачу данных и не выдаст соответствующего сообщения. Режимы контроллера DMA позволяют передавать данные как по одному слову (Single Word), так и по несколько сразу (Multi Word). Передача данных со скоростью до 16.6 Мбайт/c - обычный протокол, со скоростью 66 Мбайт/c (или 100) - протокол UltraDMA. Упрощенная схема обмена внешнего устройства с памятью в режиме прямого доступа к памяти показана на рис.4.
Контроллер DMA имеет несколько каналов. Каждому периферийному устройству, работающему в режиме прямого доступа к памяти выделяется канал с определенным номером. Устройство может послать контроллеру запрос обмена — DRQx и получить разрешение обмена — DACKx#. На шине управления устанавливается сигнал записи или чтения данных при работе внешнего устройства с памятью. Для передачи данных используется шина данных (рис.5.). При операциях с прямым доступом к памяти по каналу DMA адрес порта указывать не требуется, посылаемые сигналы идентифицируются по номеру канала. Временная диаграмма цикла передачи данных из внешнего устройства в память будет выглядеть следующим образом:
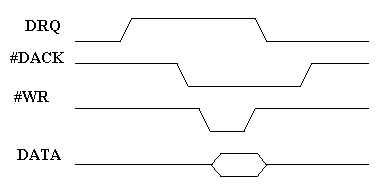
Рис.5. Схема обмена сигналами управления для передачи данных в режиме DMA
Получив запрос DRQx ( х - номер канала DMA, выделенного устройству), контроллер DMA запрашивает управление шиной и ждет разрешения от процессора. Процессор прерывает выполнение текущей программы, программирует контроллер прямого доступа на определенный режим передачи данных и посылает сигнал разрешения прямого доступа к памяти. Контроллер выставляет адрес ячейки памяти и формирует сигналы DACKx# и WR#. Сигнал DACKx# указывает на то, что операция выполняется для канала х, WR# определяет режим записи данных, при чтении устанавливается сигнал чтения RD). Контроллер передавая данные модифицирует счетчик адреса и осуществляет передачу одного слова за другим. Контроллер повторяет эти шаги для каждого следующего сигнала DRQx, пока не будет исчерпан счетчик циклов. В последнем цикле обмена контроллер формирует общий сигнал окончания ТС (TerminateCount), который может быть использован для формирования сигнала аппаратного прерывания. При работе в режиме прямого доступа к памяти контроллер DMA выполняет следующие функции:
принимает запрос на прямой доступ к памяти от внешнего устройства;
формирует запрос процессору на захват системной шины;
принимает сигнал, подтверждающий переход процессора в состояние захвата шины внешним устройством (перехода в состояние, при котором процессор отключается от системной шины);
формирует сигнал, сообщающий внешнему устройству о начале выполнения циклов прямого доступа к памяти;
выдает на шину адреса системной шины адрес ячейки оперативной памяти, предназначенной для обмена;
вырабатывает сигналы, обеспечивающие управление обменом данными;
по окончании цикла прямого доступа к памяти контроллер снимает сигнал запроса, процессор снова становится хозяином системной шины.
Каждый канал контроллера прямого доступа к памяти состоит из 5-ти регистров, четырех 16-разрядных регистров (рис.6) и одного 6-ти разрядного:
регистра текущего адреса (CAR);
регистра циклов прямого доступа к памяти (CWR);
регистра хранения базового адреса блока памяти (BAR);
регистра хранения базового числа циклов прямого доступа к памяти (WCR);
6-разрядного регистра режима (MR).
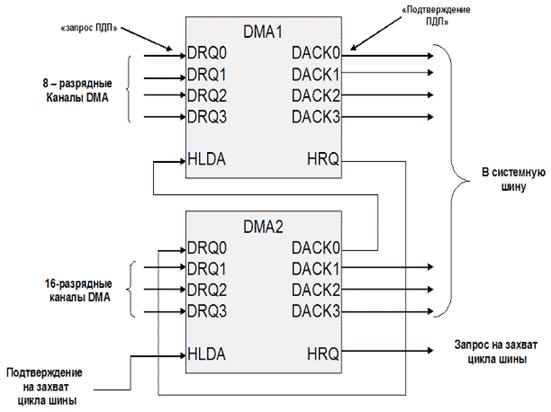
Рис.6. Каскадное включение контроллеров DMA
Регистр текущего адреса хранит текущий адрес ячейки памяти при выполнении цикла прямого доступа к памяти. После выполнения каждого цикла передачи данных содержимое этого регистра уменьшается на единицу. То есть при выполнении циклов регистр работает в режиме вычитающего счетчика. В режиме инициализации содержимое регистра текущего адреса принимает базовый адрес из регистра хранения базового адреса, а в счетчик циклов загружается базовое число циклов передачи данных. Для организации прямого доступа в память в компьютерах IBM PC/XT использовалась одна 4-канальная микросхема DMA 18237, канал 0 которой был предназначен для регенерации динамической памяти (сейчас регенерацию осуществляет внутреннее устройство управления микросхемы памяти). Каналы 2 и 3 служат для управления передачей данных между дисководами гибких дисков, а также винчестером и оперативной памятью соответственно. Свободным оставался только канал DMA 1. Канал DMA 1 обычно используется звуковыми картами. Один канал DMA может использоваться различными устройствами, но не одновременно. IBM PC/AT -совместимые компьютеры имеют уже 7 каналов прямого доступа к памяти. Как и для контроллеров прерываний, увеличение числа каналов было достигнуто путем каскадного включения двух микросхем i8237, интегрированных в микросхему контроллера периферии (южный мост); канал 0 DMA2 используется для подключения каналов контроллера DMA1 (рис. 6) .
Каналы первого контроллера по-прежнему используются как 8-ми разрядные, каналы второго контроллера используются для передачи 16-ти разрядных данных в одном цикле обмена данными. Рассмотрим устройство контроллера DMA (рис. 7)
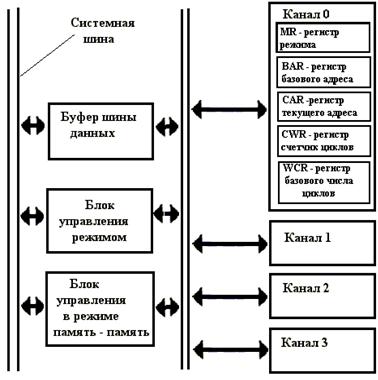
Рис.7. Структурная схема контроллера DMA
Структура одного канала показана на примере канала 0. В каждом канале регистры BAR и WCR предназначены для хранения констант - базового адреса и базового числа циклов. Они загружаются в режиме программирования контроллера одновременно с регистрами CAR (базовый адрес памяти) и CWR ( текущий адрес памяти). Регистр режима MR определяет режим работы канала. Он содержит информацию о типе цикла прямого доступа (чтение (ОП <- ВУ), запись (ОП -> ВУ), проверка), режиме изменения регистра текущего адреса (CAR) - увеличение или уменьшение и режиме работы канала - передача по запросу, одиночная передача, блочная передача, каскадирование (работа каскадной схемы контроллера DMA). Блок управления режимом содержит регистр команд и регистр условий. Регистр команд блока управления режимом определяет основные параметры работы канала. Загружается при программировании контроллера микропроцессором. Регистр условий хранит разрешение на прямой доступ каждому каналу (устанавливается программно) и запоминает факт перехода через 0 в регистре хранения базового числа циклов каждого канала. Контроллер DMA может работать в двух основных режимах: в режиме программирования и режиме выполнения циклов прямого доступа к памяти. В режиме программирования процессор работает с контроллером прямого доступа к памяти, как с внешним устройством. После загрузки в контроллер DMA управляющих слов контроллер переходит в пассивное состояние. В этом состоянии контроллер находится до тех пор, пока не поступит запрос на прямой доступ к памяти от внешнего устройства или от процессора. Обнаружив запрос на прямой доступ к памяти, контроллер выставляет процессору запрос на захват системной магистрали и ожидает от него подтверждения захвата шины, т.е. отключения процессора от системной шины и перехода его выходов в состояние высокого сопротивления ( Z-состояние). При получении сигнала подтверждения захвата (HLDA) контроллер начинает выполнять циклы передачи данных в режиме прямого доступа к памяти. Необходимые для управления шиной сигналы вырабатываются самим контроллером DMA. Контроллер DMA можно рассматривать как устройство, являющееся главным абонентом системной шины. С введением шины PCI изменился принцип организации работы внешних устройств с памятью в режиме DMA. На шине PCI отсутствуют сигналы DREQx и DACKx, здесь применяется технология захвата управления шиной внешним устройством (Bus Mastering - BM). Технология захвата управления шиной (busmastering) совместима с протоколом режима UDMA и реализует работу в режиме DMA ( передачу данных из памяти в устройство напрямую или наоборот, минуя процессор) для каждого устройства, которое может быть главным абонентом системной шины. Концепция главного абонента шины делает прямой доступ к памяти излишним. Дополнительно установленная схема главного абонента шины на адаптере внешнего устройства позволяет осуществлять прямой доступ к памяти каждому такому устройству. Адаптер главного абонента шины может вырабатывать все сигналы управления шиной сам и, следовательно, имеет возможность обращаться к области адресов памяти и ввода-вывода любым необходимым способом. Использование внешнего главного абонента шины обеспечивает большую гибкость и эффективность, чем работа с контроллером DMA, но требует более сложных арбитражных операций. Это ведет к существенному увеличению сложности и стоимости устройства, работающего в режиме управления шиной. Можно, конечно, рассматривать устройство управления шиной, расположенное на адаптере внешнего устройства, как форму контроллера DMA, который организует быстрый обмен данными между основной памятью и адаптером. Однако прямой доступ к памяти - это только часть концепции главного абонента шины.
Похожие работы
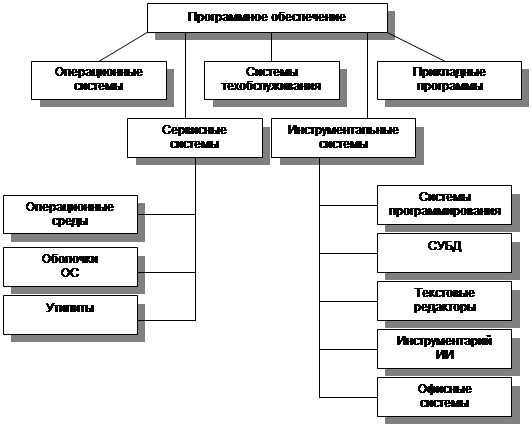
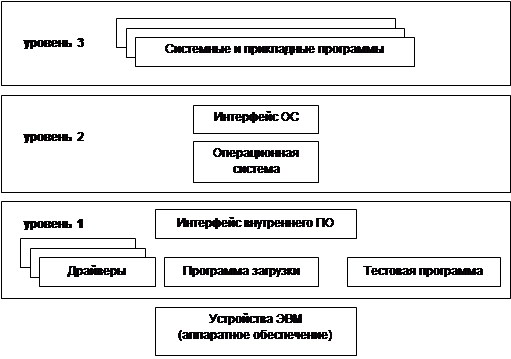
... – набор утилит и некоторые инструментальные программы (пользовательский интерфейс). К третьему уровню относятся все остальные программы. Программы второго и третьего уровней хранятся в файлах. Программное обеспечение первого уровня является машинно-зависимым [computer-independent]. То есть для каждого микропроцессора или семейства ЭВМ набор данных программ уникален. Операционная система имеет ...

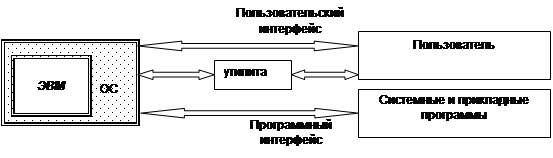
... также невысока и обычно составляет около 100 кбайт/с. НКМЛ могут использовать локальные интерфейсы SCSI. Лекция 3. Программное обеспечение ПЭВМ 3.1 Общая характеристика и состав программного обеспечения 3.1.1 Состав и назначение программного обеспечения Процесс взаимодействия человека с компьютером организуется устройством управления в соответствии с той программой, которую пользователь ...
... метод доступа с передачей полномочия. Охарактеризовать метод множественного доступа с разделением частоты. Какие существуют варианты использования множественного доступа с разделением во времени? Лекция 5.ЛВС и компоненты ЛВС Компьютерная сеть состоит из трех основных аппаратных компонент и двух программных, которые должны работать согласованно. Для корректной работы устройств в сети их нужно ...
... вычислительным сетям"; ГОСТ 11326.2-79, ГОСТ 11326.16-79; структурной схемой ЛВС; необходимыми документами по обеспечению режимных мероприятий, специальными требованиями, предъявляемыми к электронно-вычислительной технике (ЭВТ) объектов информации соответствующей категории и предписаниями на эксплуатацию. Требования к средствам вычислительной техники Стандартными средствами при оснащении объектов ...
0 комментариев