Навигация
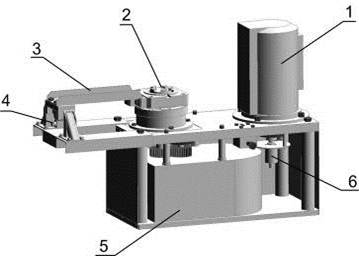
ОПИСАНИЕ ПОДЪЕМНО-ТРАНСПОРТНОГО МЕХАНИЗМА
73935
знаков
5
таблиц
19
изображений
1. ОПИСАНИЕ ПОДЪЕМНО-ТРАНСПОРТНОГО МЕХАНИЗМА
1.1. Модель подъемно-транспортного механизма
Проектирование моделей, в полной мере описывающих различные характеристики и состояния подъемно-транспортного механизма, практически является не решаемой задачей, так как на практике представляется невозможным учесть все внутренние и внешние факторы, оказывающие влияние на подъемно-транспортный механизм в процессе работы. Например, невозможно определить величину и направление ветра в тот или иной момент работы механизма, так же в процессе функционирования объекта могут возникать различные непредвиденные ситуации, помехи.
Большую проблему при проектировании систем подобного рода представляет расчет сил необходимых для “отрывания” груза от опорной поверхности. При существующих методах расчета эта задача не имеет решения или его очень сложно получить в виде пригодном для дальнейшего применения. С помощью аппарата нечетких множеств, используя знания экспертов, можно существенно упростить решение данной задачи. Рассмотрим подробнее действия оператора и состояния подъемно-транспортного механизма в процессе работы.
В процессе работы оператор крана осуществляет некоторую последовательность действий, с целью перемещения груза из одной точки в другую. Оператор, воздействуя на органы управления подъемно-транспортного механизма, задает скорость движения, угол поворота стрелы, направление движения, одновременно контролируя поведение объекта, наблюдая, чтобы не возникало различных нежелательных и критических ситуаций.
Изменение скорости подъемно-транспортного механизма в процессе работы представлено на рис. 1.1
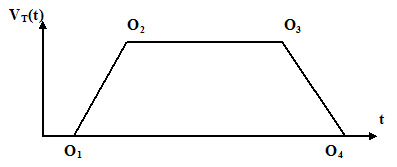
Рис. 1.1. О1 – точка начала разгона, О2 – точка конца разгона, О3 – точка начала торможения, О4 – точка конца торможения
Для каждой из точек характерна некоторая совокупность внутренних и внешних факторов, оказывающих влияние на рассматриваемый объект. На рис. 1.2 показана схема разложения на силы при раскачивании груза, который перемешается краном.
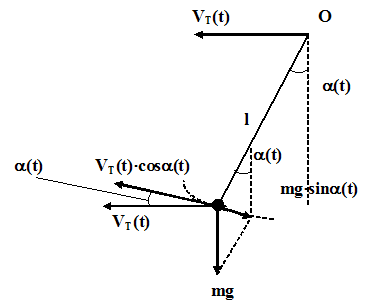
Рис. 1.2 VT(t) - текущая скорость перемещения крана, a(t) - текущий угол отклонения груза, m - масса груза
Баланс моментов относительно точки О имеет вид: М1+М2=М3, где ![]() - момент инерции груза относительно точки подвеса;
- момент инерции груза относительно точки подвеса; ![]() - момент, создаваемый составляющей скорости подвеса относительно точки подвеса; M3=mgl×sina(t) - момент, создаваемый составляющей веса груза относительно точки подвеса.
- момент, создаваемый составляющей скорости подвеса относительно точки подвеса; M3=mgl×sina(t) - момент, создаваемый составляющей веса груза относительно точки подвеса.
После интегрирования и преобразований получим уравнение:
 ,(1.1)
,(1.1)
где a(t=0)=a0, ![]() - начальные условия нелинейного интегро-дифференциального уравнения.
- начальные условия нелинейного интегро-дифференциального уравнения.
Составить дифференциальные уравнения, описывающие подобную динамическую систему достаточно сложно и нет никакой гарантии, что она будет адекватной моделью [2].
1.2. Принцип работы нечетких гибридных регуляторов
Нечеткие регуляторы подразделяют на три типа:
1. Логико-лингвистические регуляторы,
2. Аналитические регуляторы
3. Обучаемые нечеткие регуляторы.
У каждого из этих регуляторов свои достоинства и недостатки, но к наиболее значимым недостаткам ЛЛР табличного типа можно отнести их ограниченную размерность (общее число переменных не должно превышать трех и субъективность выбора интервалов и соответствующих значений лингвистических переменных).
Обучаемые нечеткие регуляторы и системы управления относятся к классу наиболее перспективных. Они сохраняют высокую работоспособность в условиях помех и погрешностей измерения, а также достаточно быстро настраиваются на меняющиеся условия производства, снижая тем самым потери от неэффективного управления.
Объединяя другие типы регуляторов в более сложные структуры, проектная цель должна дополняться к подходящим управляющим характеристикам каждого регулятора в общие характеристики гибридного регулятора.
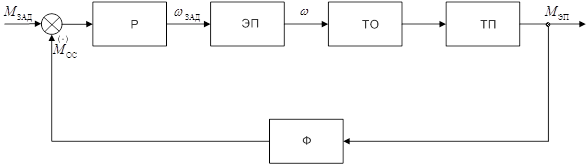
Гибридный регулятор работает как многорежимный регулятор, который имеет три режима операций, управляемых режимом операции модуля действий (Рис. 1.3). Изменение режимов зависит от величин нечетких вводов регулятора. В зависимости от этого установятся следующие соотношения:

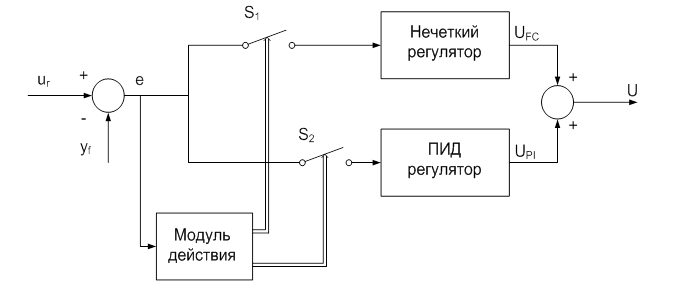
Рис. 1.3. Состав гибридного регулятора
1.3. Нечеткая формализация параметров
В настоящее время разработаны многочисленные методы, позволяющие сохранять неизменным положение транспортируемого груза относительно заданной траектории при помощи специальных схем подвеса. Однако они не рассчитаны на резкие, непредвиденные изменения ситуации, связанные с влиянием внешних возмущающих факторов (изменение направления, скорости ветра, появления помех, возникновение аварийных ситуаций, требующих перехода системы в специальные режимы работы или немедленной остановки). Так же с помощью традиционных методов ПИД-регулирования невозможно обеспечить приемлемое качество управления при резком начале движения груза в момент отрыва от поверхности опоры и остановке в заданной точке пространства.
Таким образом, числовая информация, поступающая от датчиков (значение угла отклонения, угловой скорости, скорости груза), не позволяет, найти решение формальными методами при существующих ограничениях. В этом случае или нужно существенно округлять исходные данные, что может привести к получению неверного результата, или воспользоваться знаниями экспертов, которые выражаются в нечеткой словесной форме. Таким образом, наиболее целесообразным в сложившихся условиях представляется использование методов нечеткой логики для построения системы стабилизации груза.
Рассмотрим особенности применения аппарата нечетких множеств и нечеткой логики для решения данной задачи. Обработка нечеткой информации в задачах принятия решений (ПР) обеспечивается применением лингвистического подхода (аппарата нечеткой логики) [3].
В рамках лингвистического подхода в качестве переменных допускаются не только числа, но слова и предложения естественного языка, а аппаратом их формализации является теория нечетких множеств. Лингвистический подход при построении моделей принятия решений позволяет:
- применять для описания элементов задачи ПР приближенные, субъективные оценки экспертов, выраженные с помощью нечетких понятий, отношений и высказываний профессионального языка лиц принимающих решения (ЛПР);
- формализовать нечеткие описания с помощью нечетких множеств, лингвистических переменных и нечетких свидетельств;
- оперировать полученными формализованными объектами посредством аппарата, развиваемого на основе теории нечетких множеств;
- представлять результаты решения задачи как в виде нечетких описаний с использованием понятий и отношений профессионального языка экспертов, так и в виде четких рекомендаций;
- формализация нечетких понятий и описаний профессионального языка ЛПР обеспечивается введением понятий нечеткой и лингвистической переменных, нечеткого множества и отношения, что обеспечивает переход от словесных описаний элементов задач ПР к числовым представлениям.
Нечетким множеством А на множестве X называется совокупность пар вида ![]() ={mA(x)/x}, xÎX, где mA - отображение элементов множества D в единичный отрезок [0,1], называемое функцией принадлежности нечеткого множества А. Значение функции принадлежности mA(x) для элемента xÎX называется степенью принадлежности.
={mA(x)/x}, xÎX, где mA - отображение элементов множества D в единичный отрезок [0,1], называемое функцией принадлежности нечеткого множества А. Значение функции принадлежности mA(x) для элемента xÎX называется степенью принадлежности.
Лингвистическая переменная (ЛП) задается набором [5, 6]:
<ai,T(ai),X,G,M>, ![]() (1.2)
(1.2)
где aI - название i - ой ЛП; T(ai) - терм-множество ЛП ai; Х - область определения элементов множества T(ai); G - синтаксическое правило (грамматика), порождающее элементы (j-е нечеткие переменные) ![]() ; M - семантическое правило, которое ставит в соответствие каждой нечеткой переменной (НП)
; M - семантическое правило, которое ставит в соответствие каждой нечеткой переменной (НП) ![]() нечеткое множество
нечеткое множество ![]() - смысл НП
- смысл НП ![]() .
.
Нечеткие переменные (НП) ![]() , составляющие терм-множества лингвистических переменных aI, задаются в виде тройки множеств
, составляющие терм-множества лингвистических переменных aI, задаются в виде тройки множеств
![]() (1.3)
(1.3)
где ![]() - наименование НП; Х - базовое множество;
- наименование НП; Х - базовое множество; ![]() - нечеткое подмножество множества Х,
- нечеткое подмножество множества Х, ![]() - функции принадлежности, задание происходит путем экспертного опроса.
- функции принадлежности, задание происходит путем экспертного опроса.
Для всех ЛП терм-множества задаются экспертами и могут, по мнению экспертов, содержать любое количество нечетких переменных (термов). Проведенная данным образом формализация параметров моделей принятия решений позволяет рассматривать не только численные значения, но и ввести экспертные оценки параметров.
Похожие работы
... в связи с тем, что человеческий фактор играет важную роль в деятельности организации, внимание к людям в управлении организацией приобретает большие масштабы. В ОАО «ЧАЗ» используется стратегия расширения сферы деятельности и доли рынка. В связи с этим кадровая политика предприятия ориентирована на развитие персонала и привлечения дополнительно высококвалифицированных работников. Деятельность ...
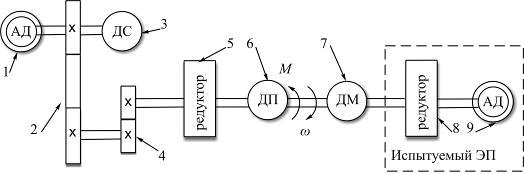
... элементов АСУ ТП 2.1 Разработка общих алгоритмов функционирования АСУ ТП. Блок – схемы алгоритма и их описание Система управления процессом испытания электропривода лифтов предназначена для управления нагрузочным электроприводом испытательного стенда в ручном или автоматическом режиме, разработана на базе микропроцессорного программируемого контроллера и выполняет следующие функции: ввод, ...
... коммерческого арбитража -оказание местным и зарубежным фирмам информационных и консультационных услуг -содействие развитию инфраструктуры информационного обслуживания предпринимательства -содействия предпринимателям в вопросах патентоведенья изобретений, регистрации товарных знаков -содействию организации международных выставок -оказание издательских и рекламных услуг, издание ...
... автомобилей ощущается нехватка малотоннажных и большегрузных автомобилей, а также специализированного подвижного состава. В настоящей курсовой работе решаются конкретные вопросы организации сервиса при доставке грузов потребителям транспортной продукции с оптовой базы в свете реализации федеральной целевой программы, что должно обеспечить эффективное удовлетворение потребностей в перевозках ...
0 комментариев