Навигация
Розробка електричної принципової схеми інформаційно-вимірювальної системи тиску газу в газопроводі
34604
знака
1
таблица
13
изображений
3. Розробка електричної принципової схеми інформаційно-вимірювальної системи тиску газу в газопроводі
При розробці принципової схеми спочатку виберемо первинний вимірювальний перетворювач тиску, який безпосередньо перетворюватиме значення тиску, різниці тисків та розрідження, що вимірюються, у вихідні електричні величині зручні для подальшої її передачі по вимірювальному каналі та обробки мікропроцесором.
Розвиток інтегральної технології дозволив створити промислові тензористивні датчики для вимірювання тиску, розрідження та перепаду тиску. Одним із провідних виробників датчиків тиску є компанія Honeywell.
Основою датчика тиску Honeywell є тензочутливий елемент (сенсор). Він складається з чотирьох ідентичних тензорезисторів, імплантованих на поверхню круглої тонкої кремнієвої діафрагми і включених за схемою моста Уїнстона. Діафрагма сформована шляхом витравлювання ділянки однорідної кремнієвої пластини з протилежного тензорезисторам боку. Невитравлена ділянка кристала слугує жорстким несучим елементом і, одночасно, - поверхнею для реалізації інших схемотехнічних компонентів давача.
В порівнянні з сенсорами на основі металевих мембран, кремнієві мають декілька переваг. Найважливішою є довготривала стабільність параметрів. Однорідний кремнієвий кристал є ідеальним матеріалом для сприйняття зусиль завдяки своїй еластичності, не змінній навіть при екстремальних навантаженнях. Йому невластива, в порівнянні зі стальними діафрагмами, залишкова деформація після зняття навантаження. Він або зберігає свою точну початкову форму, не залежно від прикладеного зусилля, або руйнується при виникненні максимально допустимої деформації. Другою перевагою кремнієвих сенсорів є більш висока тензочутливість – майже в 100 раз більше, ніж у класичних тензодавачів зі сталевою мембраною (діафрагмою), на яку напилений тензочутливий шар. Третя перевага – вища точність та лінійність характеристики перетворення. Вирішальними перевагами напівпровідникових давачів є дуже малі габарити, дешевизна (при серійному виробництві), висока надійність та простота експлуатації.
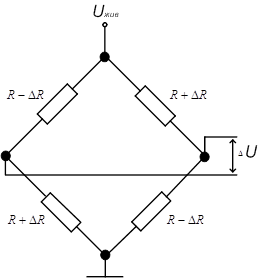
Рисунок 3.1 – Схема базового чутливого елемента компанії Honeywell
На рисунку 13 наведена схема базового чутливого елемента. Величини ![]() та
та ![]() є фактичними значеннями опорів резисторів моста при діючому тиску;
є фактичними значеннями опорів резисторів моста при діючому тиску; ![]() - величина їх опору при нульовому тиску (нульовій деформації пластини);
- величина їх опору при нульовому тиску (нульовій деформації пластини); ![]() - зміна опору в результаті прикладеного тиску. Особлива геометрія і розміщення тензорезисторів на поверхні мембрани забезпечують суворо однокову зміну їх опорів під впливом зовнішнього тиску, при цьому два опору отримують негативний приріст, а два – позитивний. Це сприяє підвищенню чутливості сенсора в декілька разів.
- зміна опору в результаті прикладеного тиску. Особлива геометрія і розміщення тензорезисторів на поверхні мембрани забезпечують суворо однокову зміну їх опорів під впливом зовнішнього тиску, при цьому два опору отримують негативний приріст, а два – позитивний. Це сприяє підвищенню чутливості сенсора в декілька разів.
Тиск чи зусилля викликає деформацію тонкої кремнієвої діафрагми, що призводить до зміни геометрії тензорезисторів, що перебувають із нею в тісному механічному зв’язку. В результаті опір тензорезисторів змінюється в залежності від величини деформації діафрагми. Відбувається перетворення прикладеного тиску (механічний вхід) в зміну опору (електричний вихід). Вихідна напруга на виході вимірювального моста прямо пропорційна напрузі живлення і величині прикладеного тиску[5].
Для вимірювання надлишкового тиску виберемо датчик FP2000 компанії Honeywell, який має наступні характеристики:
а) діапазон тисків – 0…6,98 МПа;
б) вихідний сигнал – напруга у діапазоні 0…10 В;
в) вихідний струм – 4…20 мА;
г) сумарна похибка - ![]() 0,10%;
0,10%;
д) діапазон робочих температур – від – 40 до +1150С.
Для вимірювання різниці тисків використаємо датчик 26 PC SMT компанії Honeywell, характеристики якого наступні:
а) діапазон тисків – 0…104,7 кПа;
б) вихідний сигнал – напруга у діапазоні 0…150 мВ;
в) сумарна похибка - ![]() 0,5%;
0,5%;
г) діапазон робочих температур – від – 40 до +850С.
Для вимірювання розрідження застосуємо датчик SLP компанії Honeywell, основні параметри якого наступні:
а) діапазон тисків – 0… 1 кПа;
б) вихідний сигнал – напруга у діапазоні 0…50 мВ;
в) сумарна похибка - ![]() 0,5%;
0,5%;
г) діапазон робочих температур – від – 40 до +850С[5].
Далі виберемо датчик температури. ТМР03/ТМР04 – сімейство датчиків з цифровим виходом включають в себе опорне джерело напруги, генератор, сігма-дельта АЦП, тактовий генератор. Принцип дії датчика полягає в наступному. Вихідний сигнал датчика квантується сігма-дельта модулятором першого порядку, який також відомий, як аналогово-цифровий перетворювач «з врівноважуванням заряду». Цей перетворювач використовує квантування з надлишком в часовій області і точний компаратор, які забезпечують 12-разрядну точність при досить малих розмірах схеми. Вихідний сигнал сігма-дельта модулятора кодується, використовуючи відповідну схему, яка дає на виході послідовний цифровий код у вигляді частотно-модульованого сигналу, зображений на рисунок 3.2. Даний сигнал досить просто декодується за допомогою будь-якого мікропроцесора, в значеннях температури в градусах Цельсія чи Фаренгейта, і завжди передається по одному проводу. Номінальна вихідна частота складає 35 Гц при +25°С і пристрій працює з фіксованою довжиною імпульсу Т1, яка складає 10 мс.

Рисунок 3.2 – Форми вихідного сигналу для TMP03/TMP04
Для того, щоб схематично зобразити мікросхему ТМЗ03 потрібно додатково приєднати на вихід мікросхеми паралельно резистор ![]() та керамічний конденсатор
та керамічний конденсатор ![]() .
.
Схема підключення мікросхеми ТМР03 зображена на рисунку 3.3.
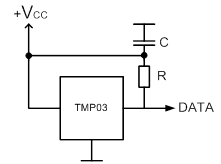
Рисунок 3.3 – Схема підключення мікросхеми ТМР03
Виберемо мікроконтролер Atmega163/L компанії ATMEL, який є КМОП 8-бітним мікроконтролером, побудованим на розширеній AVR RІSC архітектурі. Використовуючи команди, що виконуються за один машинний такт, контролер досягає продуктивності в 1 MІPS на робочій частоті 1 МГЦ, що дозволяє розробнику ефективно оптимізувати споживання енергії завдяки вибору оптимальної продуктивності. AVR ядро сполучає розширений набір команд із 32 робочими регістрами загального призначення. Усі 32 регістра з'єднані з арифметико-логічним пристроєм, що забезпечує доступ до двох незалежних регістрів при виконанні команди за один машинний такт. Завдяки обраній архітектурі досягнута найвища швидкість коду, і відповідно висока продуктивність, у 10 разів переважаюча швидкість відповідного CІSC мікроконтролера.
Умовне графічне позначення мікроконтролера ATmega163/L наведене на рисунку 3.4.
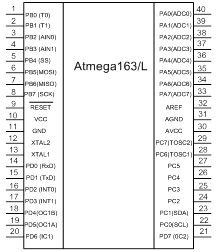
Рисунок 3.4 – Умовне графічне позначення мікроконтролера ATmega163/L
ATmega163/L містить 16 Кбайт FLASH-пам'яті, 512 байт EEPROM, 1024 байт SRAM , 32 лінії входів-виходів, 32 робочих регістра, три гнучких таймери-лічильника з модулем порівняння, внутрішні і зовнішні переривання, послідовний програмувальний інтерфейс UART, 10-бітний АЦП, Watchdog-таймер із внутрішнім генератором.
Виберемо аналого-цифровий перетворювач AD7880 для перетворення вихідної напруги датчиків тиску в цифровий код. AD7880 – 12-розрядний АЦП фірми Analog Devices, який має наступні характеристики:
а) напруга живлення - +5В;
б) струм споживання – 7 мА;
в) діапазон вхідної напруги – 0…+10В;
г) вхідний опір – 10 МОм;
д) інтегральна нелінійність – ![]() 1;
1;
е) диференційна нелінійність – ![]() 1;
1;
є) тактова частота – 2,5 МГц.
Умовне графічне позначення АЦП AD7880 наведене на рисунку 3.5.

Рисунок 3.5 – Умовне графічне позначення АЦП AD7880
Для забезпечення роботи АЦП в режимі постійного перетворення необхідно підключити до його входу CLKIN генератор прямокутних імпульсів на основі кварцового резонатора, схема якого подана на рисунку 3.6. При цьому необхідно, щоб частота кварцового резонатора F було більшою тактової частоти АЦП FCLKIN.

Рисунок 3.6 – Схема генератора
Для підсилення сигналу датчиків тиску SLP та 26 PC SMT перед подачею їх на вхід АЦП використаємо операційний підсилювач. Оскільки аналого-цифровий перетворювач працює у діапазоні від 0 до + 10 В, то операційний підсилювач буде забезпечувати підсилення напруги у цьому діапазоні. Підсилювати вихідну напругу датчика FP2000 немає потреби, оскільки її діапазон співпадає із діапазоном вхідної напруги АЦП.
Для вирішення такої задачі можна використати сучасний швидкодіючий закордонний операційний підсилювач LM358. Технічні характеристики операційного підсилювача LM358 наступні:
а) напруга живлення – від 2,5 до 7,0 В;
б) струм спокою: 0,8 мА;
в) вхідний опір: 1000 МОм;
г) клас точності: 0,06.
Схема диференційного включення операційного підсилювача зображена на рисунку 3.7.

Рисунок 3.7 – Схема диференційного включення операційного підсилювача LM358
Вихідна напруга підсилювача ввімкненого за диференційною схемою буде дорівнювати підсиленій різниці напруг на його входах
![]() ,(3.1)
,(3.1)
де ![]() – коефіцієнт підсилення операційного підсилювача;
– коефіцієнт підсилення операційного підсилювача;
![]() – напруга на неінвертуючому вході підсилювача;
– напруга на неінвертуючому вході підсилювача;
![]() – напруга на інвертуючомо вході.
– напруга на інвертуючомо вході.
Коефіцієнт підсилення, при ввімкненні операційного підсилювача так, як це показано на рисунку 3.7, буде визначатись відношенням резистора R2 до резистора R1, тобто:
![]() .(3.2)
.(3.2)
Для забезпечення роботи датчиків необхідно гарантувати стабільне їх живлення. Для цього використаємо схему джерела живлення з використанням лінійного стабілізатора напруги МС7810 зображену на рисунку 3.8.

Рисунок 3.8 – Схема джерела живлення
У схемі використовується лінійний стабілізатор напруги МС7810, на виході якого підтримується стале значення напруги 10В. Ця напруга і використовується для живлення схеми приладу. У схемі використовуються також три електролітичні конденсатори С1, С3 та С5 ємністю 220 мкФ, призначені для того, щоб не пропускати низькочастотні складові у сигнальні кола, та три керамічних конденсатори С2, С4 та С6 ємністю 0,1 мкФ – для усунення високочастотних завад.
Для спряження ІВС з ПЕОМ згідно технічного завдання використаємо інтерфейс RS-485, призначений для обміну даними по симетричній лінії зв’язку. Основні параметри інтерфейсу:
а) лінія зв’язку – симетрична, екранована вита пара;
б) відстань передачі даних – 1200 м при використанні витої пари з поперечним перерізом проводу AWG24;
в) максимальна швидкість обміну даними – 10 Мбіт/секунду.
До основних переваг інтерфейсу можна віднести:
а) відносно низька собівартість мікросхем драйверів;
б) малі габаритні розміри мікросхем драйверів;
в) низьке енергоспоживання.
Для реалізації інтерфейсу використаємо мікросхему ADM485 виробництва фірми Analog Devices, умовне графічне позначення якої наведено на рисунку 3.9.

Рисунок 3.9 – Умовне графічне позначення мікросхеми ADM485
Параметри мікросхеми MAX485 наступні:
а) напруга живлення – 5 В;
б) струм споживання – 0,5 мА;
в) швидкодія – 2,5 Мбіт/секунду.
У схемі необхідно забезпечити гальванічну розв’язку між драйверами і приймачами інтерфейсу та джерелами даних. При відсутності її перевантаження на лінії може привести до виходу з ладу пристроїв підключення до шини.
Для забезпечення гальванічної розв’язки використаємо оптопару 4N35, схема підключення якої зображена на рисунку 3.10. Принцип роботи оптопари наступний. Коли через світлодіод оптопари протікає струм, він випромінює світло. Відповідно відкривається фототранзистор оптопари і через нього почаняє протікати струм. Фототранзистор включений як емітерний повторювач, відповідним навантаженням якого є резистор R3.
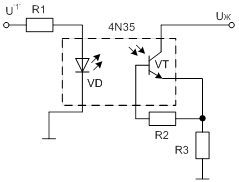
Рисунок 3.10 – Схема підключення оптопари
Отже, в даному розділі описані датчики тиску, розрідження, різниці тисків і температури та основні мікросхеми, що входять до електричної принципової схеми ІВС, такі, як мікроконтролер, АЦП, драйвер інтерфейсу RS-485.
Похожие работы
... стратегією розвитку ВАТ «Дніпропетровськгаз» є стратегія зниження мінімізації витрат, тобто зменшення собівартості реалізуємої продукції та послуг. Розділ 2. Обґрунтування заходів з підвищення економічної ефективності операційної діяльності ВАТ «Дніпропетровськгаз» 2.1 Техніко-економічне обґрунтування заходів В умовах державного регулювання цін реалізації газу єдиною стратегією розвитку ...
... і вирізаються, при цьому виконують виявлення і усунення причин браку. Якщо причиною браку виявляється низька кваліфікація зварника, то його звільняють від роботи. 5.3 Технологія будівництва поліетиленовими газопроводами з висвітленням технології зварювання поліетиленових труб в розтруб Для з'єднання труб І деталей з поліетилену низького тиску застосовують контактне теплове зварювання у стик ...
... , звитих в плоскі спіралі. Кінці спіралей приварені до трьох роздаючих і до трьох колекторних труб. 2. Призначення, склад, технічні характеристики системи автоматичного регулювання 2.1 Призначення системи автоматичного регулювання Система автоматичного регулювання (САР) турбіни виконується електрогідравлічною і структурно складається з електричної і гідравлічної частин, робота яких взає ...
... 7.6, 1.5, 2.5 Блок ручного управління БРУ 42 3 Блок сигналізації положення БСПТ 7.9, 1.8, 2.8 Виконавчий механізм МЕО-250 3 5. Опис найбільш складних схем автоматизації технологічного процесу 5.1 Схема контролю і регулювання співвідношення “газ-повітря” Контроль і регулювання співвідношення “газ - повітря” (додаток №1) складається з датчиків ...
0 комментариев