Навигация
Розробка електричної принципової схеми об’єкту
25928
знаков
7
таблиц
2
изображения
2.2 Розробка електричної принципової схеми об’єкту.
На основі структурної схеми розроблена електрична принципова схема, яка знаходиться на листі А3 графічної частини проекту.
Схема управління лінією розбита на функціональні блоки.
В ручному режимі блок 7 вибору режиму роботи (ручний - автоматичний) впливає безпосередньо на виконавчі механізми 1, 2 та 3 через блоки 8, 9 та 10. Сигналізацію включення цих механізмів здійснюють блоки сигналізації 4, 5 та 6.
В автоматичному режимі управління виконавчими механізмами виконується датчиком 11 контролю верхнього рівня у машині 3.
Після пуску в роботу блока 3 забезпечується можливість включення у роботу блока 2 виконавчого режима через блоки пуску 9 та 10. Після запуску в роботу блока 2 можливість включення у роботу блока 1 через блоки пуску 9 та 8. Сигналізація про запуск в роботу виконавчих механізмів виконується блоками сигналізації 4, 5 та 6.
Схема працює наступним чином: після вмикання автоматичних вимикачів QF3-QF7, живлення подається на силову частину кола і на коло керування.
У ручному режимі перемикач SA переводиться у положення „Р”. При натисканні кнопки SB2 „Пуск”, замикається коло живлення котушки магнітного пускача KM3 по колу: фаза А – перемикач SA – контакти кнопок SB1 та SB2 – котушка пускача KM3 – контакт теплового реле КК3 – нульовий провід N. При цьому замикається блок-контакт KM3. Одночасно замикаються силові контакти KM3 в колі живлення двигуна М3. Двигун М3 привода змішувача отримує живлення. Контактом KM3 замикається коло живлення сигнальної лампи HL3.
При натисканні кнопки SB4 „Пуск”, отримує живлення котушка пускача KM2 по колу: фаза А - перемикач SA – SB3 – SB4 – KM2 – КК2 – N. Замиканням головних контактів KM2 в силовому колі, здійснюється подача живлення на двигун М2 привода транспортера. Про робочий стан М2 сигналізує лампа HL2.
При натисканні кнопки SB6 „Пуск”, отримує живлення котушка пускача KM1 по колу: фаза А - перемикач SA – SB5 – SB6 – KM1 – КК1 – N. При цьому замикається блок-контакт KM1, блокуючи кнопку SB6 і в колі живлення сигнальної лампи HL1 з’явиться струм. Замикаються силові контакти KM1 і здійснюється подача живлення на двигун М2.
При натисканні кнопок SB1, SB3, SB5 „Стоп” забезпечується втрата живлення котушок магнітних пускачів, розмикаються силові контакти всіх пускачів і двигуни зупиняються, а відповідні сигнальні лампи гаснуть.
У автоматичному режимі перемикач SA переводиться у положення „А”.
Отримують живлення датчик верхнього рівня BL у машині 3 та реле КL через трансформатор TV 220/12 В. При цьому замикаються контакти КL у колі живлення котушки магнітного пускача KM2 і котушки реле часу KT.
Отримують живлення котушка магнітного пускача KM3 по колу: фаза А - перемикач SA – KM3 – КК3 – N. При цьому замикаються головні контакти KM3 і двигун М3 починає працювати. Також блок-контактами KM3 замикається коло живлення сигнальної лампи HL3 і коло живлення пускача KM2.
Для контролю верхнього рівня у машині 3 передбачений датчик BL, який включений від трансформатора TV через проміжне реле КL. Доки рівень сировини в машині не досягне до заданого рівня, доти BL – замкнутий, отримує живлення котушка КL1, відповідно її контакти замкнуті. Котушка С отримує живлення по колу: фаза А – SA – KM3 – КL – KT – KM2 – KK1 – N. Замикаються контакти KM2 – вмикається двигун М2 і сигнальна лампа HL2, отримує живлення KM1 по колу: фаза А – SA – KM2 – KM1 – KK1 – N. Замикаються силові контакти KM1 і вмикається двигун М1 разом із сигнальною лампою HL1.
Автоматичний режим забезпечує послідовне вмикання машин 3 – 2 – 1. При досягненні заданого рівня у машині 3, BL – розмикає коло котушки КL. Втрачає живлення котушка пускача KM2, що приводе до зупинки М2, розмикається контакт KM2 у колі котушки KМ1, розмикаються контакти KМ1 і двигун М1 зупиняється, а М3 – продовжує працювати.
Зупинку машини 2 з зупинкою часу забезпечує програма реле часу KT. Під час роботи всіх машин лінії у заданий момент часу котушка KT отримує живлення, розмикається контакт KT у колі живлення котушки KМ2, котушка обезживлюється, і двигун М2 зупиняється. Лампа HL2 – гасне. Одночасно розмикається блок-контакт KM2 і замикається контакт KT у колі живлення котушки пускача KМ1. Котушка KМ1 знаходиться під напругою. Залишаються замкнуті її контакти KМ1, працює двигун М1.
Так забезпечується безперервна робота машини 1 за технологією.
2.3 Вибір та перевірочний розрахунок силового електрообладнання
Двигуни обираємо трифазні з короткозамкненим ротором на напругу 380В, і частоту струму 50 Гц.
Приміщення кормоприготувального відділення відноситься до особливо сирих, тому двигуни обираємо закриті, серії 4АМ, с/г виконання.
Виконуємо перевірочний розрахунок потужності силового електрообладнання для транспортеру ТС – 40М з урахуванням режима роботи за прийнятою технологією.
Потужність, що необхідна для приводу транспортера, а також вибір двигуна визначаємо за формулою:
P = (0,02…0,03)×(ПL + H)×h, (2.1)
де L – довжина транспортера, L = 4 м;
Н – висота підйому вантажу, Н = 2 м;
h - ККД приводу, h = 0,7;
П – продуктивність машини, П = 40000 кг/год.
P = 0,025×(40000×4 + 2)×0,7 = 2,8 кВт
Рдв. ³ Ррм
Вибираємо стандартний двигун потужністю Рдв. = 3 кВт
Перевірка двигуна за умовами пуску
Мпдв. ³ Мзр, (2.2)
де Мпдв. – пусковий момент, Н×м;
Мзр. – момент зрушення машини Н×м;
Мпдв. = Мн×µп×kU2 (2.3)
де Мн. – номінальний момент, Н×м;
µп – кратність пускового моменту, µп = 0,2;
kU2 – коефіцієнт зниження напруги у мережі, kU2 = 0,81
 (2.4)
(2.4)
де Рн. – номінальна потужність двигуна, Рн = 3×103 Вт
wн – номінальна кутова швидкість, с-1;
![]() , (2.5)
, (2.5)
де nн. – номінальна частота обертання, nн = 1410 об/хв
![]() рад/с
рад/с
 Н×м
Н×м
Мпдв. = 20×2×0,81 = 32 Н×м
Момент опору робочої машини
 , де (2.6)
, де (2.6)
де Рм. – номінальна, необхідна для приводу транспортера, Вт
![]() Н×м
Н×м
Момент зрушення робочої машини
Мзр = (0,2...0,3) Мон (2.7)
Мзр = 0,25×40 = 10 Н×м
Мпдв.= 32 Н×м > Мзр = 10 Н×м
Двигун проходить за умовами пуску.
Перевірка перевантажувальної здатності
Мmax дв. ³ МmaxРм, (2.8)
Мmax дв.= Мн×µmax×kU2 (2.9)
Мmax дв = 20×2,5×0,81 = 40,3 Н×м
МmaxРм = Мом = 40 Н×м
Мmax дв. > МmaxРм
Двигун проходить за умовою.
Транспортер запускається на холостому ходу, тому перевірка двигуна за умовами мінімального опору не виконується.
Обраний двигун підходить за кліматичним виконанням СУ3, вся інші двигуни перевіряються аналогічно.
Таблиця 2.1 Вибір електросилового обладнання
| Електросилове обладнання | |||||
| Тип електродвигуна | Рн, кВт | nн, об/хв | h, % | cosj | Ki |
| 4АМ100S4CУ3 | 3 | 1410 | 84 | 0,84 | 6,5 |
| 4АМ200S4CУ3 | 40 | 1470 | 92 | 0,89 | 6,5 |
| 4АМ100S4CУ3 | 4 | 1410 | 84 | 0,84 | 6,5 |
2.4 Розрахунок, вибір і обґрунтування пускозахисної, конрольнорегулюючої апаратури керування об’єктом
2.4.1 Вибір схеми електричної мережі
Згідно з технологічними вимогами до проекту електрифікації силовий розподільчий щит і шафа керування розміщені в окремому приміщенні – електрощитовій.
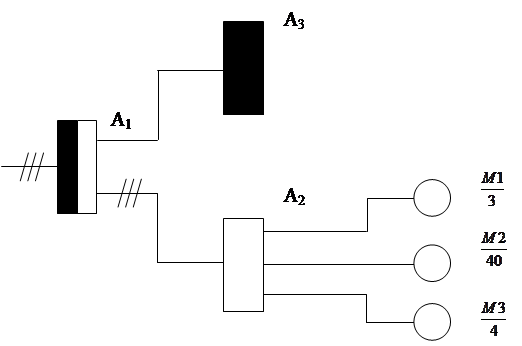 |
Від силової розподільчої шафи А1 живиться шафа керування А2 і
освітлювальний щит А3. Від шафи керування до струмоприймачів прокладається при чотири провідні лінії.
Похожие работы
... і вирізаються, при цьому виконують виявлення і усунення причин браку. Якщо причиною браку виявляється низька кваліфікація зварника, то його звільняють від роботи. 5.3 Технологія будівництва поліетиленовими газопроводами з висвітленням технології зварювання поліетиленових труб в розтруб Для з'єднання труб І деталей з поліетилену низького тиску застосовують контактне теплове зварювання у стик ...


... коштів є важливим чинником у зниженні собівартості продукції чи виконаної роботи. Раціональне використання оборотних коштів залежить від правильного їхнього формування і ефективної організації виробництва. Зосередження н підприємствах зайвих оборотних коштів приводить до їхнього заморожування. Це завдає шкоди економіці господарства. Щоб уникнути такого положення, оборотні кошти нормуються, що є ...


... підвищення ступеня їх завантаження, відновлення фондів, використання прогресивного обладнання фондів, сучасні технології та кваліфікації робітників. Розділ 4. Управління Херсонським винзаводом у кризовій ситуації Так, вивчивши діяльність Херсонського виноробного заводу ми можемо визначити на якому етапі життєвого циклу продукту знаходиться підприємство. Його діяльність та стан відображає 4-та ...
... засобів призначено рахунок 10 «Основні засоби». За дебетом рахунку відображається надходження (придбаних, створених, безоплатно отриманих) основних засобів на баланс підприємства, які обліковуються за первісною вартістю, сума витрат, яка пов’язана з поліпшенням об’єкта (модернізація, модифікація, добудова, дообладнання, реконструкція тощо), що призводить до збільшення майбутніх економічних вигод, ...
0 комментариев