Навигация
Вариатор скорости вращения асинхронного двигателя
41757
знаков
0
таблиц
0
изображений
СОДЕРЖАНИЕ
ОПРЕДЕЛЕНИЯ, обозначениЯ И СОКРАЩЕНИЯ
ВВЕДЕНИЕ
ОСНОВНАЯ ЧАСТЬ
1 Регулирование скорости вращения асинхронных двигателей
2 Разработка структурной схемы
3 Выбор элементной базы
3.1 Выбор двигателя
3.2 Выбор и описание микроконтроллера
3.3 Выбор датчика скорости
3.4 Выбор датчика температуры
3.5 Выбор АЦП
3.6 Выбор ЦАП
3.7 Выбор остальных элементов
4 Разработка функциональной схемы
5 Разработка алгоритма работы и программы
ЗАКЛЮЧЕНИЕ
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ
ОПРЕДЕЛЕНИЯ, обозначениЯ И СОКРАЩЕНИЯ
Асинхронный электродвигатель (АД) – электрическая асинхронная машина для преобразования электрической энергии в механическую, работающая по следующему принципу: вращающееся магнитное поле, возникающее при прохождении трёхфазного переменного тока по обмоткам статора, взаимодействует с током, индуктированным полем статора в обмотках ротора, в результате чего возникают механические усилия, заставляющие ротор вращаться в сторону вращения магнитного поля при условии, что частота вращения ротора меньше частоты вращения поля.
Однокристальный микроконтроллер (ОМК) – микро-ЭВМ, включающая в себя все устройства, необходимые для реализации цифровой системы управления минимальной конфигурации.
ДС – датчик скорости
ДТ – датчик температуры
АЦП – аналого-цифровой преобразователь
ЦАП – цифро-аналоговый преобразователь
Г – генератор
ССУ – схема синхронизации и управления
УР – управление режимом
СС и У – сигналы синхронизации и управления
ОЗУ – оперативное запоминающее устройство
ПЗУ – постоянное запоминающее устройство
МП – микропроцессор
РПЗУ/ППЗУ – репрограммируемое ПЗУ или программируемое ПЗУ
СА – системный адаптер
Т/С – таймер/счетчик
БОП – блок обработки прерываний
ПарПП – параллельные порты ввода/вывода
ПосПП – последовательные порты ввода/вывода
БАВВ – блок аналового ввода/вывода
ИС – интегральная схема
СК – счетчик команд
вВЕДЕНИЕ
Всегда существовала потребность в регулировании скорости двигателей, чтобы оптимально управлять технологическим процессом. Раньше это делалось механически, например, с помощью механического вариатора. Благодаря большим преимуществам электроники возможны более универсальные приложения и общие понятия современного привода. Раньше для решения задачи регулирования скорости использовались только приводы постоянного тока. Теперь асинхронные приводы становятся все более популярными с каждым днем. Они состоят из вариатора скорости и асинхронного двигателя. Причины этого развития следующие:
• асинхронные машины нетребовательны к техобслуживанию;
• возможно эксплуатирование во взрывоопасной зоне;
• высокий коэффициент мощность/масса для асинхронного двигателя;
• возможность управления при максимальной скорости;
• низкая стоимость асинхронных двигателей.
Основные сферы применения регуляторов скорости следующие:
• насосы, вентиляторы, компрессоры;
• конвейер и транспортное оборудование;
• текстильные машины;
• механические станки и деревообрабатывающие машины;
• упаковочные машины;
• роботы и транспортные системы;
• оборудование для бумажной промышленности.
В промышленности наибольшее распространение получили трехфазные асинхронные двигатели с короткозамкнутым ротором, имеющие трехфазную обмотку на статоре и питающиеся от трехфазной сети.
В данном проекте рассматривается возможность регулирования действующего значения напряжения нагрузки в цепи переменного тока с помощью тиристорного регулятора, состоящего из двух встречно-параллельных тиристоров, включенных последовательно с нагрузкой. В этом случае пара тиристоров регулирует напряжение, подведенное к фазе статора, и фазное напряжение представляет собой отрезки синусоид. Если управляющие импульсы подаются в начале положительных полупериодов анодных напряжений, то тиристоры открываются без запаздывания. При этом тиристорные пары фактически оказываются закороченными, и к статорным обмоткам прикладывается полное напряжение сети. При увеличении угла запаздывания интервал проводимости тиристоров уменьшается, поэтому действующее значение напряжения на нагрузке снижается. При угле запаздывания, равном 180°, тиристоры полностью запираются, вследствие чего напряжения и токи двигателя равны нулю. Такое использование тиристорных ключей как последовательно включенных нелинейных сопротивлений характеризуется тем достоинством, что в самом регуляторе выделяется значительно меньшая мощность, чем в нагрузке.
ОСНОВНАЯ ЧАСТЬ
1 Регулирование скорости вращения асинхронных двигателей
Большинство двигателей переменного тока вращается с угловой скоростью, которая определяется в первую очередь частотой питающего напряжения. Угловая скорость синхронных двигателей зависит только от частоты питания, а для асинхронных двигателей она несколько ниже синхронной угловой скорости. При постоянной частоте сети для заданного скольжения развиваемый асинхронным двигателем момент пропорционален квадрату напряжения питания. Так как установившийся режим работы наступает при равенстве моментов двигателя и нагрузки, то скольжение ротора зависит от момента нагрузки и напряжения питания. Поэтому регулировать угловую скорость можно плавным изменением напряжения при неизменной его частоте.
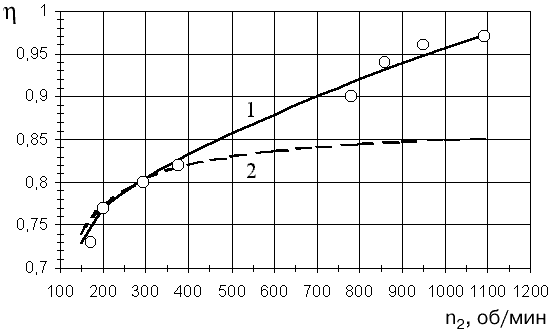
По мере снижения напряжения статора угловая частота ротора уменьшается, однако при этом снижается максимальный момент двигателя, поэтому при постоянном моменте нагрузки диапазон регулирования скорости ограничен. В двигателях с повышенным активным сопротивлением ротора диапазон регулирования увеличивается (рис. 1), однако потери в роторе при этом растут и КПД двигателя снижается, особенно при пониженных частотах вращения. Ухудшение режима работы двигателя объясняется тем, что при заданном скольжении ток двигателя пропорционален напряжению питания, а электромагнитный момент зависит от квадрата этого напряжения. Поэтому по мере снижения скорости отношение момента к току падает, и для получения сравнительно небольших моментов при низких скоростях требуются значительные токи.
Однако в электроприводах вентиляторов и насосов момент нагрузки изменяется примерно пропорционально квадрату угловой скорости. Следовательно, момент, требующийся при пуске и небольших угловых скоростях, мал и может быть получен без чрезмерного выделения тепла регулированием напряжения питания обычных асинхронных двигателей с номинальным скольжением, равным примерно 10% (рис. 2).
Снижение напряжения статора достигается путем включения регулируемых внешних сопротивлений между выводами статора и фазами сети. Раньше для этих целей использовались дроссели насыщения, а в настоящее время их вытеснили тиристорные устройства, которые имеют существенные преимущества при сравнимой стоимости. Несмотря на наличие охладителей, тиристорные устройства являются более компактными и имеют значительно меньшую массу. Они характеризуются также более высоким КПД и быстродействием, которое составляет всего половину периода сети, в то время как для дросселей насыщения оно равно примерно 0,1с и больше. Кроме того, тиристорные устройства, выпущенные различными изготовителями, являются взаимозаменяемыми, в то время как характеристики различных дросселей насыщения сильно отличаются друг от друга. Основная схема включения тиристоров в регуляторах переменного тока состоит из двух тиристоров, соединенных встречно-параллельно и управляемых симметрично, т. е. в одинаковые моменты каждого полупериода.
При включении таких узлов в цепи статора и регулировании интервалов проводимости тиристоров можно изменять действующее значение приложенного к двигателю напряжения от нуля до номинального. При этом двигатели питаются напряжением прерывистой формы, а их токи содержат значительные гармоники, однако для малой и средней мощности, примерно до 75 кВт, режимы работы двигателей оказываются приемлемыми. Устройства для регулирования напряжения статора значительно проще и дешевле описанных ранее схем преобразователей частоты. Однако КПД асинхронных электроприводов с регуляторами напряжения невысок, поэтому приходится завышать габариты двигателей во избежание превышения их температуры из-за увеличения тока и ухудшения вентиляции. Тиристорные регуляторы напряжения широко используются для электроприводов малой мощности и приводов кранов и лебедок, где большие моменты при низких частотах вращения требуются лишь в течение небольшой части рабочего цикла.
2 Разработка структурной схемы
Структурная схема замкнутой системы строится следующим образом. Электропривод с асинхронным двигателем управляется от тиристорного регулятора. С целью контроля температуры корпуса двигателя будет использоваться датчик температуры. Для получения информации о скорости вращения вала двигателя будет использоваться тахогенератор, вал которого жестко сопряжен с осью рабочего двигателя. Сигналы с датчиков поступают на блок управления, который подает управляющие сигналы на тиристорный регулятор скорости.
Похожие работы



... [1], при фиксированных Fn (нажим в контакте) и f, именно значение β определяет величину Ft, а, следовательно, и момент на выходном валу. Влияние пассивной адаптивности можно определить из рассмотрения зоны фрикционного контакта ведущего и ведомого тел качения вариатора (рис.1). Рис. 1. Зона фрикционного контакта ведущего и ведомого тел качения вариатора Центры О1 и О2 а также, радиусы ...





... о выборе лучшего варианта привода принимается на основе сопоставления приведенных затрат на одинаковый объем выпускаемой продукции. В данном проекте необходимо обеспечить регулирование продолжительности времени выпечки с коррекцией по температуре во второй зоне пекарной камеры. При этом необходимо учитывать, что производительность печи при замене системы привода меняться не должна, а также ...

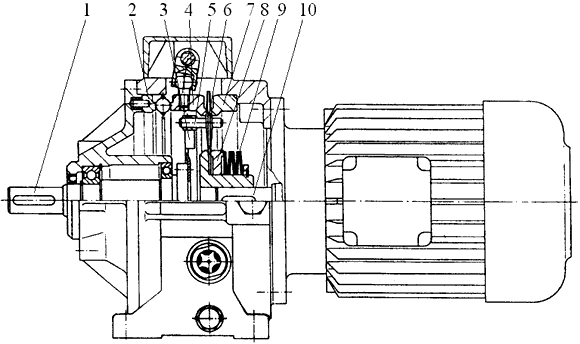
... передача» и заявке на международный патент РСТ/RU99/00162 (автор – Н.В. Гулиа). Принципиальная схема автоматической бесступенчатой коробки передач автомобиля на основе нового адаптивного вариатора представлена на рис. 1. На этой схеме вариатор включает всего два ряда центральных фрикционных дисков – внешних 10 и внутренних 5 с зажатыми между ними сателлитами 7 при помощи тарельчатых (или просто ...
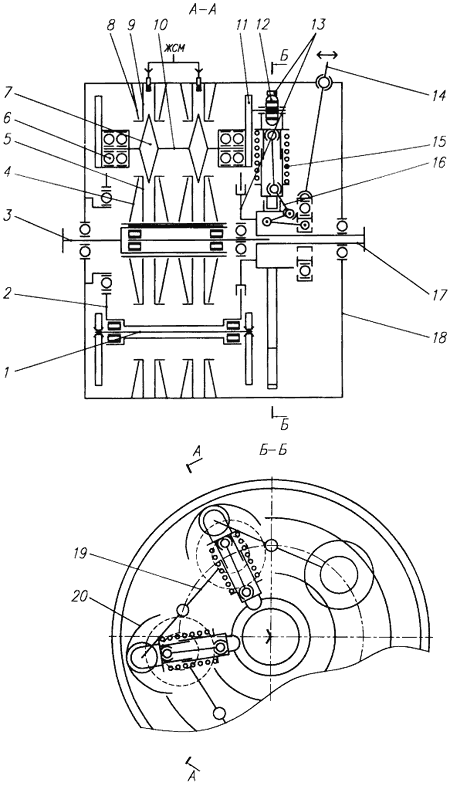

... и с помощью усилителей, имеющих упругую характеристику (например, пневмокамер, управляемых от пневмосистемы). Следует отметить, что вариатор является прогрессивным и без механизма изменения усилия пружин. Но тогда он будет иметь всего одну «мягкую» рабочую характеристику, например, как у гидротрансформатора или электродвигателя постоянного тока с последовательным возбуждением. Описанный механизм ...
0 комментариев