Обзор отечественных разработок
Анализ дестабилизирующих факторов
Основные технические параметры
Выбор материалов конструкций
Выбор и обоснование компоновочной схемы, методов и
Задаемся вероятностью правильного расчета р
Выбор способов и методов герметизации
Выбор способов и методов виброзащиты
Расчет теплового режима блока управления электромеханического замка
Расчет конструктивно-технологических параметров
Полный расчет надежности
Расчет технологичности изделия
Обоснование выбора средств автоматизированного проектирования
Мероприятия по защите от коррозии, влаги, электрического удара, электромагнитных полей и механических нагрузок
Защита от электрического удара
Навигация
Обоснование выбора средств автоматизированного проектирования
Разработка блока управления электромеханическим замком
129657
знаков
12
таблиц
1
изображение
7 Обоснование выбора средств автоматизированного проектирования
7.1 Применение ЭВМ и САПР в курсовом проектировании
САПР – наилучшая форма организации процесса проектирования‚ основными частями которой являются технические средства, общее и специальное программное и математическое обеспечения, информационное обеспечение – банк данных, справочные каталоги, значения параметров, сведения о типовых решениях. Проектирование РЭА и создание оптимального технического решения в сжатые сроки связано с большими трудностями. Один из путей преодоления этих трудностей без существенного увеличения численности работающих - использование возможностей современных ЭВМ.
Под проектированием в широком смысле понимают использование имеющихся средств для достижения требуемой цели, координацию составных частей или отдельных действий для получения нужного результата. Процесс проектирования сложного РЭУ включает следующие основные этапы: эскизное проектирование, техническое проектирование, разработка КД на опытные образцы и их изготовление, испытания, освоение в производстве.
В связи с совершенствованием элементной базы РЭА, а также конструктивно-технологических характеристик проектируемых модулей всех типов, в несколько раз увеличивается трудоемкость составления технической документации. Все это приводит к необходимости совершенствования методов конструкторского проектирования РЭА, основой которых является автоматизация процесса конструирования.
Количественный и качественный выигрыш от применения ЭВМ состоит в следующем:
а) полностью или частично отпадает необходимость: в затратах на комплектующие изделия, материалы и конструктивные элементы, необходимые для изготовления макета; в измерительных приборах для определения характеристик конструкции; в оборудовании для испытаний конструкций.
б) значительно сокращается время определения характеристик, а следовательно, и доводки конструкции
в) появляется возможность: разрабатывать конструкции, содержащие элементы, характеристики которых известны, но самих элементов нет у разработчика; имитировать воздействия, воспроизведение которых при натурных испытаниях затруднено, требует сложного оборудования, сопряжено с опасностью для экспериментатора, а иногда и вообще невозможно; проводить анализ конструкции на разных частотах или в области высоких или низких температур, где применение измерительных приборов становится затруднительным.
7.2 Перечень и содержание конструкторских работ, выполненных с применением САПР
В данном курсовом проекте в ППП PCAD были выполнены чертежи схемы электрической принципиальной и печатной платы базового модуля. Чертежи деталей, схемы электрической структурной и сборочный чертеж базового модуля БУ были выполнены в ППП AutoCAD.
8 Анализ и учет требований эргономики и технической эстетики
Максимально допустимые размеры ЛП определяются исходя из горизонтального и вертикального угловых размеров зоны периферического зрения оператора и требуемого расстояния l до ЛП [17, рис. 2.1]. Максимальная длина ЛП равна:
![]() , (8.1)
, (8.1)
где aгор - горизонтальный угол обзора ЛП.
Максимальная высота
![]() , (8.2)
, (8.2)
где aверт - вертикальный угол обзора ЛП.
Для зоны периферического зрения оператора принимают aгор = 90°, aверт =75°. Применительно к разрабатываемому устройству l = 0,8 м при общем числе элементов Nэл = 2. Тогда
![]() м.
м.
![]() м.
м.
Минимально допустимые размеры ЛП определяются из следующих соображений. В соответствии с эргономическими требованиями в поле зрения, ограниченном углом зрения 10°, должно размещаться 4...8 элементов ЛП (для расчета принимаем 4 элемента). Тогда площадь зрения Sпз на ЛП, ограниченная указанным углом 10°, может быть вычислена по формуле
. ![]() (8.3)
(8.3)
![]() м2.
м2.
При числе элементов Nэл, размещаемых на ЛП, минимальная площадь ЛП, удовлетворяющая эргономическим требованиям, равна
. ![]() (8.4)
(8.4)
![]() м2.
м2.
Фактическую площадь ЛП выбирают, как
![]() , (8.5)
, (8.5)
где КЛП - коэффициент использования площади, обычно равный
КЛП = 0,4...0,7. Для разрабатываемой панели примем КЛП = 0,5.
Тогда![]() м2.
м2.
Тогда линейные размеры находятся следующим образом.
Один из размеров выбирается из стандартного ряда габаритов, а оставшийся находится по (8.6). Выбираем высоту панели Н = 0,185 м.
![]() , (8.6)
, (8.6)
где Н - выбранный стандартный размер.
Подставляя значение Н в (8.6), получим
![]() м.
м.
Округляем значение до L = 0,135 м.
Полученные значения размеров ЛП соответствуют размерам корпуса блока управления электромеханическим замком, полученным в результате компоновочного расчета
Похожие работы
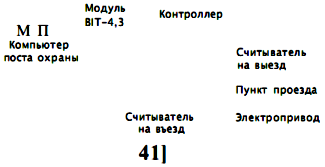
... переговорные (аудио) видеоустройства. Системы серии PERCoMS400 могут использоваться в сочетании с более сложными системами контроля и управления доступом. При этом одни и те же карточки могут служить пропусками на все разрешенные к доступу объекты. Максимальное число пользователей для систем PERCoMS400 составляет примерно 500 человек. В настоящее время серия PERCoMS400 имеет несколько моделей. ...
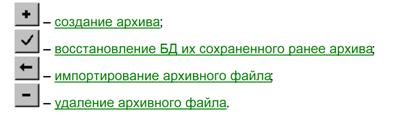
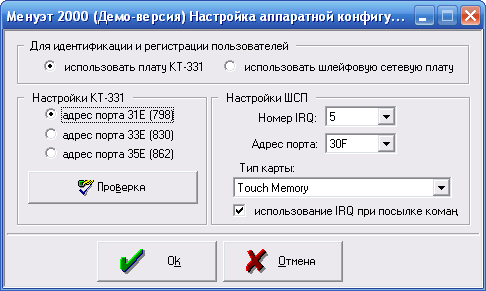
... без сохранения воспользуйтесь кнопкой Отмена или закройте окно стандартным для Windows приемом. Примечание. 1. Программы-архиваторы в состав программно-аппаратного комплекса Менуэт 2000 не входят и для поддержания возможности создания архивов баз данных регистрации и объектов контроля Вы должны позаботиться о наличии на жестких дисках АРМ'М, на которых инсталлированы модули ПАК Менуэт 2000 ...
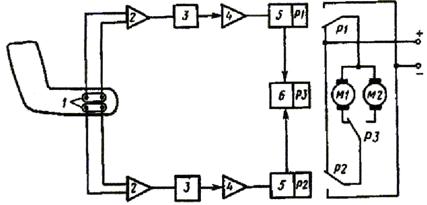
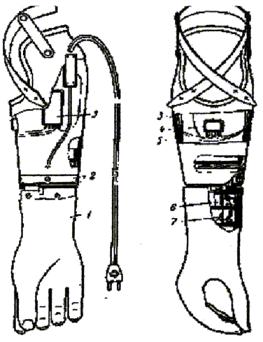
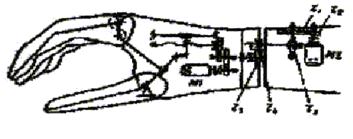
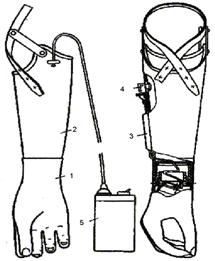
... электродвигатель. Редуктор состоит из двух ступеней зубчатой передачи Zi и Z2 (рис. 3), самотормозящейся винтовой пары Z3 и зубчатой передачи с внутренним зацеплением Z4,Z5. Рис. 2 Протез предплечья с биоэлектрическим управлением с двумя функциями Максимальный вращающий момент привода составляет 0,5 - 5 Н*м; число поворотов — не менее 15 об/мин; масса протеза не превышает 1,2 кг. Рис. ...
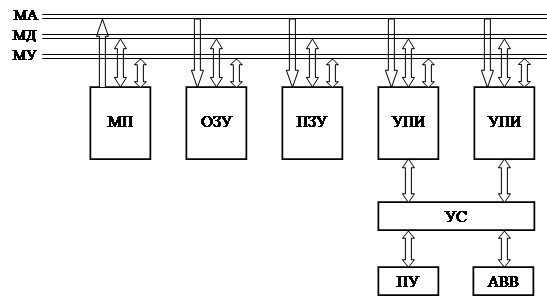
... ввести распределенную обработку во всех подсистемах вычислительной системы, что определяет новые способы организации вычислительных процессов в системах с децентрализованными управлением и обработкой информации. 2. Интерфейс микропроцессоров Для включения микропроцессора в любую микропроцессорную систему необходимо установить единые принципы и средства его сопряжения с остальными устройствами ...
0 комментариев