Навигация
Организация синхронизации
24566
знаков
1
таблица
10
изображений
3. Организация синхронизации
Вероятность ошибки приема (выделения) кодовой комбинации из 8 разрядов при допустимой вероятности ошибки выделения разрядного импульса (ошибки приема разрядов независимы) находим из выражения [3, 5]:
![]() ,
, ![]()
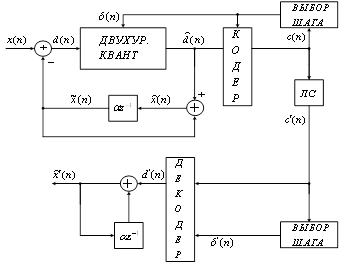
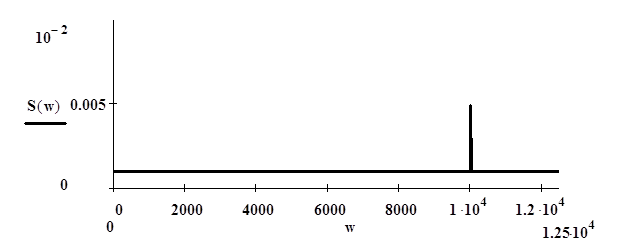
В системе организована канальная синхронизация. То есть, в начале каждого цикла передачи информации (первый канальный интервал) передается 2 одинаковых ИС. Кадровое синхрослово по своей структуре должно существенно отличаться от всех возможных кодовых комбинаций, поэтому необходимыми требованиями к синхросигналу являются: энергия больше энергии, передаваемой в информационном канале, а так же чтобы его форма не повторяла форму сигнала [3].
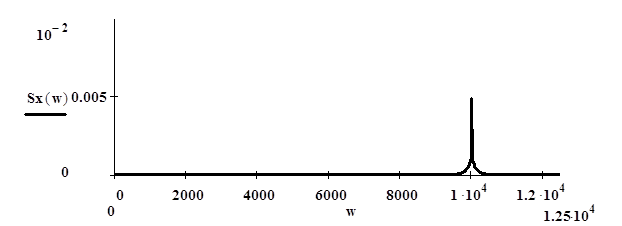
Для выделения ИС в приемнике используется дискретный согласованный фильтр, настроенный на ИС. В него поочередно записываются принимаемые кодовые слова, а в момент превышения выходным напряжением порога выделяется импульс кадровой синхронизации. В начале каждого цикла обмена на приемной стороне запускается тактовый генератор и производится синхронизация. Используя повторяемость ИС, можно, накапливая их, увеличить помехоустойчивость устройства синхронизации [3]. Если по прошествии двух периодов дискретизации не приходит синхропризнак, то система переводится в режим пониженного энергопотребления до появления следующего ИС или окончания связи. Это обеспечивает, в целом, малое потребление системы.
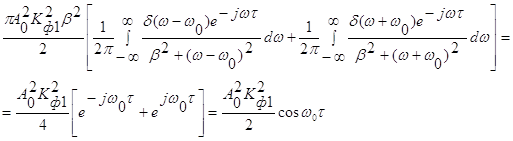
Вероятность ошибки синхронизации при такой организации можно определить так:
![]()
![]()
Как видно, эта вероятность ошибки намного меньше, чем вероятность ошибки РД, приходящейся на один информационный разряд.
3. Расчет параметров радиолинии «ЦП - объект»Считаем, что после сеанса связи (если на данном направлении нет больше объектов) система переходит в режим поиска. ЦП излучает гармонический сигнал длительностью ТК, после чего переходит в режим приема и ожидает ответ от объектов. Если ответ получен, то ЦП переходит в режим определения координат объекта.
Энергетические соотношения в этом случае определяются вероятностью ложной тревоги F и надежностью связи РН при обнаружении сигнала со случайной амплитудой и фазой.
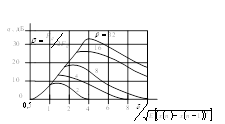
Зависимость вероятности правильного обнаружения от отношения сигнал/шум определяется формулой [4]:

Принимая вероятность правильного обнаружения равной надежности, находим порог обнаружения:
![]() ,
, ![]()
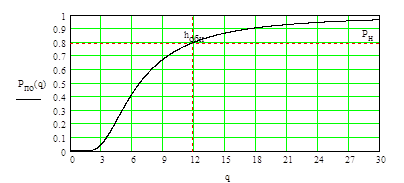
Рис. 4. График зависимости вероятности правильного обнаружения от отношения сигнал/шум.
Тогда мощность принимаемого сигнала, которая будет обеспечивать выбранное отношение сигнал/шум, равна
![]() ,
, ![]() Вт.
Вт.
Мощность передатчика наземной станции составляет [5]:
 ,
, ![]() Вт.
Вт.
Радиоизмерительная система ЦП осуществляет поиск объектов, их опознавание по ответному сигналу, измерение заданных параметров взаимного расположения ЦП и объекта, прием и хранение информации. Точность измерения и разрешения координат объекта не хуже 1% от максимальной величины измеряемого параметра (угла или дальности), причем угловое или дальномерное разрешение измерителя в зоне поиска позволяет проводить сеанс связи только с одним из объектов. Общее число объектов в зоне обслуживания не превышает тридцати единиц. Запросно-ответная радиолиния ЦП–объект обеспечивает, заданную вероятность ложной тревоги F и выбранную вероятность правильного опознавания объекта, равную надежности связи РН [5].
Наиболее часто в РЛС используют последовательный метод обзора, при котором ДН антенны отклоняется в пределах заданного сектора (зоны) обзора. Обеспечение большой дальности действия (при ограничении энергии излучаемого сигнала) и чувствительности приемного устройства, а также повышение угловой разрешающей способности и точности системы возможно лишь за счет сужения ДН, что, в свою очередь, приводит к увеличению времени, необходимого для обзора заданного объема пространства [4].
Предположим, что минимальная высота объекта над земной поверхностью 5 км, а максимальная – не более 20 км. Тогда, выбрав винтовой способ обзора [1, 4], при котором каждая точка ДН описывает линию, близкую к винтовой, пространство сканирования ограничится координатами:
![]() - по дальности,
- по дальности,
![]() - по азимуту,
- по азимуту,
![]() - по углу места.
- по углу места.
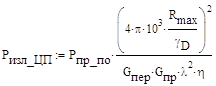
Движение ДН представляет собой комбинацию кругового вращения по азимуту и постоянного подъема по углу места. Причем обратный ход по углу места происходит значительно быстрее.
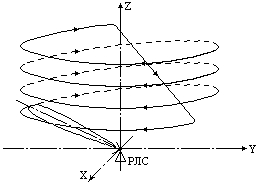
Рис. 5. Винтовой метод обзора пространства.
Для исключения возможности пропуска целей обеспечивается двойное перекрытие ДН на смежных витках при отклонении по углу места.
Полагаем, что ДН перемещается равномерно, и каждый элемент сектора обзора находится в равных условиях, а для надежного обнаружения и для определения координат цели необходимо принять несколько сигнальных импульсов в пределах ДН, тогда скорость её отклонения должна быть снижена.
Для определения координат объекта на ЦП используется комбинированный угломерно-дальномерный метод. Этот метод позволяет найти местоположение объекта из одной точки (и это является большим преимуществом данного метода) и наиболее часто используется в РЛС, которые измеряют наклонную дальность R, азимут a и угол места b.
Рис. 6. Определение координат объекта.
Считаем, что на станции установлен моноимпульсный измеритель угловых координат. Наиболее совершенным является суммарно-разностный вариант моноимпульсного измерителя, так как теоретически он позволяет исключить влияние изменений амплитуды и фазы принимаемых сигналов на стабильность равносигнального направления и пеленгационной характеристики и тем самым обеспечить наибольшую точность определения направления. При суммарно-разностной обработке сравниваются амплитуды сигналов. Для исключения влияния неравенства и нестабильности коэффициентов усиления каналов сравнение амплитуд производится до приемных каналов непосредственно после облучателей антенны с помощью высокочастотных мостовых схем, выполняемых на волноводах или коаксиальных линиях в зависимости от рабочего диапазона системы [4].
Слежение за объектом ведется путем совмещения равносигнальной оси с направлением на объект.
Достоинством моноимпульсной суммарно-разностной системы является возможность принципиального устранения влияния флуктуаций амплитуды сигнала, с помощью сравнения амплитуд и фаз сигналов, принятых по нескольким каналам [1].
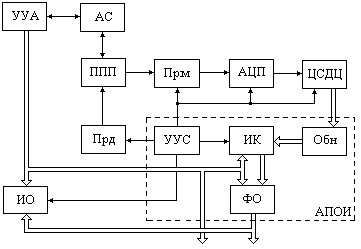
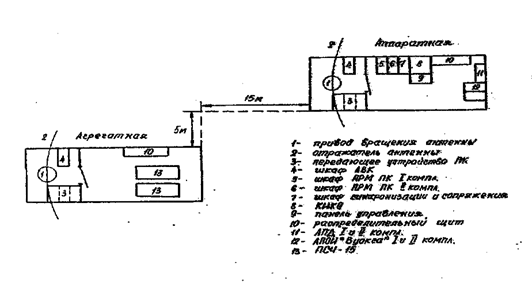
5. Описание структурной схемы центральной станцииЦентральная наземная станция состоит из двух связанных систем: угломерно-дальномерной и системы приема информации с объекта. Угломерно-дальномерная система определяет угол места и азимут на объект, а также расстояние (наклонную дальность) до объекта. Структурная схема ЦП приведена в приложении 1.
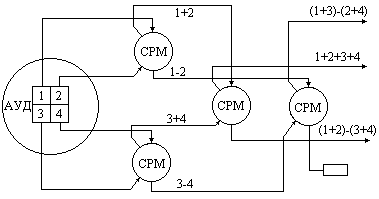
При двумерном слежении по азимуту и углу места измеряются рассогласования по a b. Антенна имеет четыре излучателя, симметрично смещенных относительно фокуса зеркала. В измерителе три суммарно-разностных моста: два – для образования разностных сигналов по a и b, третий – для формирования общего суммарного сигнала. Разносный выход третьего моста замкнут на поглощающую нагрузку. Приемное устройство содержит соответственно три приемных канала: суммарный и два разностных. Выделенные на выходе фазовых детекторов напряжения рассогласования по a и b с помощью следящих систем управляют положением равносигнальной оси, непрерывно совмещая ее с направлением на сопровождаемый объект [4].
Устройство управления антенной (УУА) служит для винтового обзора пространства. В качестве углового датчика используется ФАР, выполняющая функцию пространственного фильтра.
Как было отмечено выше, на ЦП используется импульсный режим излучения, поэтому в момент окончания очередного зондирующего радиоимпульса (ЗИ) антенна переключается от передатчика (Прд) к приемнику (Прм) и используется для приема до начала генерации следующего зондирующего радиоимпульса, после чего антенна снова подключается к передатчику и т.д. Эта операция выполняется переключателем прием-передача (ППП). Пусковые импульсы, задающие период повторения зондирующих сигналов и синхронизирующие работу всех подсистем ЦП, генерирует устройство управления и синхронизации (УУС), от которого зависит также вся логика работы. Сигнал с Прм после цифрового устройства селекции движущихся целей (ЦСДЦ) поступает на аппаратуру первичной обработки информации (АПОИ), где выполняется обнаружение сигнала и измерение координат (ИК) объекта. Окончательно отметки целей формируются в устройстве ФО. Сформированные сигналы вместе с информацией об угловом положении антенны передаются для дальнейшей обработки, а также для контроля на индикатор обзора (ИО).
Такая станция обычно ведет обработку информации в цифровой форме, для чего предусмотрено устройство преобразования сигнала в цифровой код (АЦП).
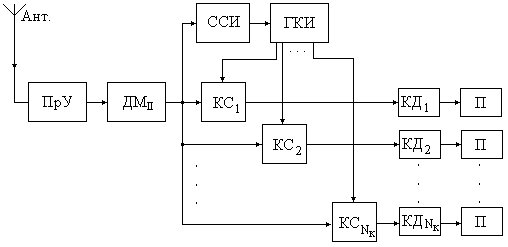
Система приема информации на ЦП имеет стандартную структуру системы выделения информации с ВРК (приложение 1).
Сигналы с объекта через антенну поступают в приемное устройство дискретных сообщений (ПрУ), где производится предварительная фильтрация и усиление. Затем в ДМII для детектирования (снятие вторичной модуляции). На выходе ДМ выделяется оценка группового сигнала. Выделенный групповой сигнал подается на селектор синхроимпульсов (ССИ). ССИ может представлять собой, например, интегрирующую цепь (ИЦ) с пороговым устройством на выходе, срабатывающим при действии на входе ИЦ синхроимпульса (ИС). Выделенные ИС поступают на генератор канальных селекторных импульсов (ГКСИ), имеющий Nкан выходов. ГКСИ вырабатывает последовательности канальных импульсов, открывающих соответствующие временные канальные селекторы (КСi), представляющие собой схемы «И». Канальные сигналы поступают на канальные демодуляторы (КДМi), где снимается первичная модуляция. На выходе КД формируются оценки переданных сообщений (снимается первичная модуляция), поступающие к получателям (Пi) [2, 3].
Для приема данных приемник ЦП должен иметь системы ФАПЧ и БАРУ.
Обращение к объекту осуществляется с помощью адреса.
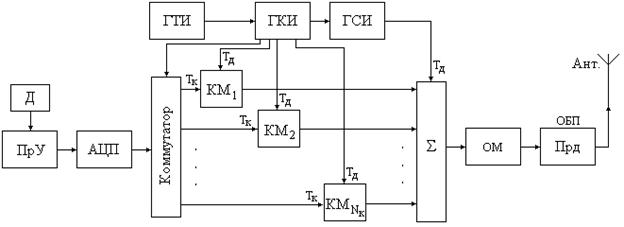
6. Описание структурной схемы объектаСистема сбора и передачи информации шар-зонда согласно ТЗ имеет структуру системы с ВРК (приложение 2).
Аналоговый сигнал с датчиков через фильтр и усилитель согласующего устройства поступает на АЦП, где преобразуется в цифровой код.
Ритм работы системы задается высокостабильным генератором тактовых импульсов (ГТИ). Тактовые импульсы поступают на генератор канальных импульсов (ГКИ), имеющий Nкан+1 выходов, где Nкан – число каналов. Канальные импульсы поступают соответственно на канальные модуляторы (КМi), где модулируются сообщениями, поступающими с коммутатора, а также на генератор синхронизирующих импульсов (ГСИ). На выходах КМ формируются модулированные канальные сигналы (первая ступень модуляции КвАМн). Параметры модуляции выбраны так, чтобы импульсы различных модулированных канальных сигналов (КС) не перекрывались. КС подаются на линейный сумматор (S) одновременно с последовательностью ИС, вырабатываемых ГСИ, которые необходимы для синхронизации работы приемной части. На выходе сумматора образуется групповой сигнал, состоящий из последовательности ИС и модулированных канальных импульсов. Групповой сигнал поступает на модулятор второй ступени (ОМ) и модулирует по амлитуде высокочастотную несущую (ОБП), вырабатываемую передатчиком (Прд).
Выводы
В курсовой работе спроектирована система сбора информации с метеорологических шар-зондов. Она обладает следующими параметрами:
- частота дискретизации 102.3 Гц;
- шаг квантования 0.294 В;
- максимальное отклонение сообщения от среднего значения 17.83 В;
- пик-фактор 4.46;
- число разрядов двоичного кода 7;
- число каналов 8;
- длительность канального сигнала 978 мкс;
- длительность импульса 139.7 мкс;
- полоса частот радиолинии 18.8 кГц;
- пороговое отношение мощности сигнала к мощности шума 38.9;
- рабочее отношение мощности сигнала к мощности шума 174.74;
- необходимая мощность передатчика зонда 282 мВт;
- необходимая мощность передатчика ЦП 231 мВт;
- рабочая длина волны 5 см.
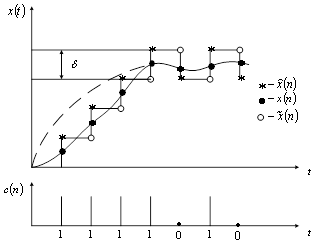
В начале кодовой посылки находится синхропризнак, амплитуда которого значительно превышает длительность информационного импульса. Синхропризнак всегда появляется с одним и тем же периодом, поэтому накапливая необходимое число отсчетов, можно добиться абсолютно четкой работы СПИ.
С целью улучшения системы сбора информации можно применить для шар-зонда антенную систему с большим КНД вследствие чего снизится рабочая мощность передатчика.
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. Бакулев П.А., Сосновский А.А Радиолокационные и радионавигационные системы: Учебное пособие для вузов. М.: Радио и связь, 1994. 296с.
2. Пенин П.И., Филиппов Л.И. Системы передачи цифровой информации: Учебное пособие для вузов. М.: Сов. Радио, 1984. 256с.
3. Радиотехнические системы передачи информации: Учеб. пособие для вузов/ Под ред. В.В. Калмыкова. М.: Радио и связь, 1990. 304с.
4. Радиотехнические системы: Учеб. пособие для вузов/ Под ред. Ю.М. Казаринова. М.: Высшая школа, 1990.496 с.
5. Белых Д.П. Методические указания к выполнению курсовой работы. Екатеринбург: УГТУ-УПИ, 2000. 32с.
Приложение 1. Структурная схема центральной наземной станции
Система определения координат объекта
Угловой датчик и преобразователь суммарно-разностного радиопеленгатора
Система приема информации с объекта
Приложение 2. Структурная схема объекта
Система передачи информации с объекта
Похожие работы

... внедрением автоматизированных систем управления воздушным движением (АС УВД), использованием последних достижений вычислительной техники, более современных радиоэлектронных средств управления воздушным движением, навигации, посадки и связи, совершенствованием методов и средств технической эксплуатации авиационной техники. Аналитический обзор аэродромных РЛС Аэродромные обзорные РЛС (ОРЛ-А) ...
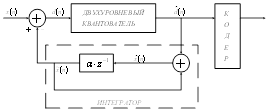
... сигналов. При этом необходимо на блоке отсчетов определять оптимальный порядок предсказателя и коэффициенты предсказания . Адаптация предсказателя может осуществляться по входному или выходному сигналу. Структурная схема системы АРИКМ с адаптивным предсказанием изображена на рисунке (рисунок 9). При адаптации по входу для восстановления сигнала в приемнике необходимо передавать , и . Пусть ...
... предполагается стационарным в широком смысле. Исследование производится для установившегося режима, после окончания переходных процессов. Основным упрощением и отличием предложенного к расчету типового радиотехнического звена от реальных систем является то, что нелинейный элемент предполагается неинерционным, а инерционные фильтры предполагаются линейными. Данное упрощение основано на том, что ...
... , а с помощью ФНЧ фильтруем НЧ сигнал. Тип фильтра подбирался так, чтобы фильтрация проходила оптимально. В ходе работы у меня закрепились знания о детектировании АМ колебаний.Список литературы.И. С. Гоноровский. «Радиотехнические цепи и сигналы». М. «Советское радио». 1994. Изд. 5, перераб. и доп. С. И. Баскаков. «Радиотехнические цепи и сигналы». М. «Высшая школа». 2000. Изд. 3, ...
0 комментариев