ТЕХНОЛОГИЧЕСКИЙ ПРОЦЕСС ПРОИЗВОДСТВА РЭА И ЗАДАЧИ
Структура производства РЭА, особенности
Система стандартизации
Если предприятие существует сравнительно давно, входит или
Задачи службы стандартизации на предприятии
Контроль хода технологического процесса и качества
Системы обеспечения качества продукции
Сертификация продукции с сертификацией системы
качества на
Структура и характеристики технологических систем
Стадии и этапы разработки РЭА
Исходные данные для разработки технологии
Основные принципы автоматизации производства
ЭВМ в режиме советчика. В таких системах кроме сбора и обра-
Понятие автоматизированного технологического
Иерархическая структура автоматизированной
Многоцелевое технологическое оборудование с микропроцессорным
Применение роботов на вспомогательных и транспортных
Алгоритмы управления роботами
Классификация систем управления
Трудно или даже невозможно дать строгое
формальное описание
Технико-экономическая эффективность как целевая
Системы оптимизации параметров технологических процессов. В
Ние системы
Устойчивость линейных САР. Если какое-либо решение линейного
Понятие и типы моделей сложных систем
Идентификация технологических процессов
Надежность технологических систем. Надежность
Вычисление условных характеристик потока отказов;
Иногда трудно осуществлять наблюдение за работой некоторых
Связь показателей надежности и качества
Методы оценки надежности технологических систем
На высшем уровне решаются задачи координации взаимодействия
ЗАКОНЫ РАСПРЕДЕЛЕНИЯ ПРОИЗВОДСТВЕНЫХ
При однобайтовой адресации и 961 при двухбайтовой
Основные понятия теории вероятности
Если нет возможности произвести замену оборудования, а сущест-
Навигация
Алгоритмы управления роботами
Технология и автоматизация производства РЭА
369637
знаков
0
таблиц
0
изображений
1.13. Алгоритмы управления роботами
Алгоритмы и методы обучения роботов подразделяются на:
- прямое обучение;
- роботоориентированное программирование;
- метод задачно-ориентированного программирования.
При прямом обучении предполагается ручное перемещение робота во
все требуемые положения и запись соответствующих им обобщенных коорди-
нат сочленений. Выполнение программы заключается в перемещении сочле-
нения робота в соответствии с заданной последовательностью положений и
не требует универсальной вычислительной машины. Ограничением является
то, что невозможно использовать датчики. Этот метод программирования
эффективен для точечной сварки, окраски и простых погрузочно-разгру-
зочных работ с фиксированными положениями рабочего органа и обрабаты-
ваемой детали в защищенной от попадания посторонних предметов и людей
зоне.
При роботоориентированном программировании используются датчики и
суть программирования заключается в том, что происходит опрос датчиков
и определяется движение робота в зависимости от обработки сенсорной
информации. Преимуществом этого метода является то, что при использо-
вании сенсорной информации робот может функционировать в условиях не-
которой неопределенности. Этот метод используется для сборки или конт-
роля качества сборки. Упростить процедуру программирования можно путем
использования в роботоориентированных языках метода машинной графики,
который связан с заменой метода прямого обучения моделированием рабо-
чего пространства роботов. Этот метод в значительной степени воспроиз-
водит процесс прямого обучения роботов с такими его достоинствами, как
возможности свободной смены точки зрения, визуального контроля взаим-
ного положения всех элементов рабочего пространства, интерактивной от-
ладкой. Подключение САПР к процессу программирования роботов позволяет
резко повысить степень интеграции робота с производственной системой,
т.е. одна и та же БД может быть использована для всей производственной
системы.
При методе задачно-ориентированного программирования определяется
- 44 -
не движение роботов, а желаемое расположение объектов. Исходной инфор-
мацией для этого метода программирования является геометрическая мо-
дель рабочего пространства и робота. Такие системы называются система-
ми моделирования рабочей обстановки. Характерной особенностью таких
систем является отказ от детального программирования конкретных дейс-
твий робота и программирование задачи в терминах взаимного положения
объектов в рабочем пространстве и его изменений. Фактически действия
робота строятся с помощью методов искусственного интеллекта на основе
модели робота и окружающих его объектов. Здесь также большое значение
имеет геометрическая модель.
Программирование роботов с использованием модельных представлений
включает 3 основных этапа:
1. формирование необходимых информационных моделей;
2. построение программных перемещений деталей с контролем взаим-
ного положения, выполнения технологических операций, в т.ч. смены зах-
ватного устройства и инструмента, проверок условий и организации логи-
ческих переходов, синхронизации с другими устройствами;
3. получение исполнительной программы управления роботом на языке
низкого уровня.
Построение геометрической модели рабочего пространства может быть
осуществлено одним из трех способов:
1. с помощью манипулятора;
2. средствами машинной графики;
3. с помощью системы технического зрения.
Первые два были рассмотрены выше (прямое обучение и роботоориен-
тированное и задачно-ориентированное программирование), а третий спо-
соб - это по-существу модификация первого - интерактивное зрение, в
котором оператор, пользуясь лазером как указкой, указывает световым
пятном характерные точки объектов рабочего пространства, а координаты
измеряются системой технического зрения.
- 45 -
2. ТЕХНОЛОГИЯ РЭА КАК СЛОЖНАЯ СИСТЕМА.
2.1. Общие принципы управления сложными системами.
При определении некоторого объекта как системы предполагается на-
личие следующих признаков:
1. объекта (системы), состоящего из множества элементов и их
свойств, которые могут рассматриваться как единое целое благодаря свя-
зям между ними и их свойствами;
2. исследователя, выполняющего любую целенаправленную деятель-
ность (исследовательскую, проектную, организационную и др.);
3. задачи, с точки зрения решения которой исследователь определя-
ет некоторый объект как систему;
4. языка, на котором исследователь может описать объект, свойства
его элементов и связи.
Любой целенаправленный процесс, происходящий в любой сложной сис-
теме, представляет собой организованную совокупность операций, которые
условно можно разбить на две группы: рабочие операции и операции уп-
равления.
Рабочие операции - это действия, необходимые непосредственно для
выполнения процесса в соответствии с природой и законами, определяющи-
ми ход процесса. Например, процесс обработки детали на токарном станке
состоит из таких рабочих операций, как закрепление детали, подача рез-
ца, снятие стружки и др.
Для достижения цели процесса рабочие операции должны направляться
и организовываться операциями управления. Совокупность операций управ-
ления образует процесс управления.
Система, в которой осуществляется процесс управления, называется
системой управления. В структурном аспекте любую систему управления
можно представить взаимосвязанной совокупностью объекта управления
(управляемой подсистемы) и управляющего органа (управляющей подсисте-
мы). Обобщенная структура системы управления приведена на рисунке 7.
──────────────────────────────────────────────────────────────────────
цель управления
┌──────────────
│
┌─────────────┼───────────────────┐
│ \│/ │
│ ┌───┴─────────┐ │
│ X(t) │ управляющий │<────────┼──────┐
│ ┌─────>│ орган ├────────┐│ │
│ │ └─────────────┘ ││ │
│ │ U(t) ││ │
│ │ ┌─────────────┐ ││ │
│ │ │объект управ-│<───────┘│ └─────
│ └──────┤ления │<────────┼─────────────
│ └─────────────┘ │возмущающие
└─────────────────────────────────┘воздействия
Рис. 7. Обобщенная структура системы управления, где: X(t) - ин-
формация о состоянии системы; U(t) - управляющее воздействие.
──────────────────────────────────────────────────────────────────────
Т.к. любой процесс управления является целенаправленным процессом,
должна быть известна цель управления. Это значит, что управляющему ор-
гану должна быть известна цель управления, т.е. информация, используя
которую можно определить желаемое состояние объекта управления. Управ-
ляющий орган воздействует на объект управления так, чтобы его состоя-
ние соответствовало желаемому.
Объект управления представляет собой открытую систему, т.е. нахо-
- 46 -
дится в динамическом взаимодействии с окружающей средой. Влияние внеш-
ней среды носит неконтролируемый характер и выражается в случайном из-
менении его состояния. Воздействие окружающей среды на объект управле-
ния называется возмущающим воздействием.
Для формального описания задачи управления введем некоторые опре-
деления. Предположим, что доступная информация об объекте управления
содержится в n функциях от времени X 4i 0(t), i=1,2...n. Будем рассматри-
вать переменные X 4i 0 как компоненты многомерной векторной функции X(t),
называемой вектором состояния объекта управления. В системе управления
эти переменные являются контролируемыми выходными переменными объекта
управления и одновременно входными переменными управляющего органа
(см. рис. 7).
Состояние объекта управления изменяется под воздействием возмуща-
ющих факторов F(t)={f 41 0(t),f 42 0(t),....,f 4k 0(t)}, называемых вектором воз-
мущения, и целенаправленного влияния управляющего органа, называемого
вектором управления U(t)={u 41 0(t),u 42 0(t),...,u 4m 0(t)}. В системе управления
переменные u 4j 0(t) являются входными переменными объекта управления и
одновременно выходными управляющего органа.
В любой момент времени t состояние объекта управления X(t) явля-
ется функцией векторов U(t), F(t), а также начального состояния X 4o 0(t),
т.е. X(t)=X{U(t),F(t),X 4o 0(t)} (7).
Уравнение (7) есть математическая модель объекта управления, опи-
сывающая закон его функционирования, в котором единственным изменяемым
целенаправленно фактором является вектор управления U(t). Задача уп-
равления формулируется следующим образом: найти такие вектор управле-
ния и вектор состояния, которые обеспечивают достижение цели управле-
ния. Цель управления может иметь различную формулировку, однако в
большинстве случаев ее можно формально определить значением J 5* 0 некото-
рого функционала J, который называют критерием управления или целевой
функцией: J= J{ X(t),F(t),U(t)} (8).
В реальных объектах управления вектор состояния и вектор управле-
ния могут находиться в определенной конечной области значений:
U(t)сA(t), X(t)сB(t) (9). Здесь А и В - замкнутые области соответс-
твенно векторного пространства управлений и состояний.
Решение задачи заключается в том, чтобы найти такие значения век-
торов состояния X 5* 0(t) и управления U 5* 0(t), при которых выполняется ус-
ловие J{X 5* 0(t),F(t),U 5* 0(t),X 4o 0(t)}=J 5* 0 (10) и одновременно удовлетворяются
ограничения (9).
Если задачу управления поставить несколько по-другому, тогда она
примет следующий вид: найти и реализовать функциональную зависимость
U 5* 0(t)=U{X(t),F(t)} (11), обеспечивающую наилучшее приближение к задан-
ному значению критерия управления. Выражение (11) называется алгорит-
мом управления. Определение программы управления заключается в выра-
ботке траектории движения системы X 5* 0(t) в пространстве параметров ее
состояния.
Контроль состоит в измерении значений компонентов вектора состоя-
ния X(t) по вектору наблюдения Z(t) и определении вектора ошибки e(t)
при наличии возмущающих воздействий F(t).
Формирование управляющего воздействии (принятие решений) заключа-
ется в определении значений управляемых переменных, приводящих объект
управления в желаемое состояние.
Функциональная схема системы управления приведена на рис. 8.
Функциональная схема системы регулирования отличается от приведенной
выше тем, что отсутствует программатор. Желаемое состояние объекта за-
дается извне и то, чем оно задается, называется обычно задающим воз-
действием.
Похожие работы
... гарантійного ремонту). В конструкції кришки для цього передбачено пломбувальний "стакан", що під час складання виробу на виробництві заповнюється пломбувальною пастою перед загвинчуванням гвинта. 2.2 Технологічний аналіз елементної бази В своєму складі блок живлення БП-9/4 має таку елементну базу: мікросхема, транзистор, діоди, конденсатори, резистори постійні та змінні. Усі перелічені ЕРЕ ...
... выполнения норм времени, принимаем равным 1. Результаты расчета показателей поточной линии сборки приведены в таблице 1.2. Маршрутное описание технологического процесса производства модуля сопряжения цифрового мультиметра с компьютером представлено в приложении в виде маршрутных карт. Таблица 1.2 – Результаты расчета показателей поточной линии сборки Операция Оборудование Производит

... 0mil 0.0deg (0.0mil,0.0mil) Flash"* Выполнив сверление отверстий в ПП, робот выполняет установку ЭРЭ. После установки ЭРЭ, плату отправляют на пайку волной припоя. 2 МОДЕЛИРОВАНИЕ ТЕХНОЛОГИЧЕСКОГО ПРОЦЕССА Моделирование – это метод исследования сложных систем, основанный на том, что рассматриваемая система заменяется на модель и проводится исследование модели с целью получения информации об ...
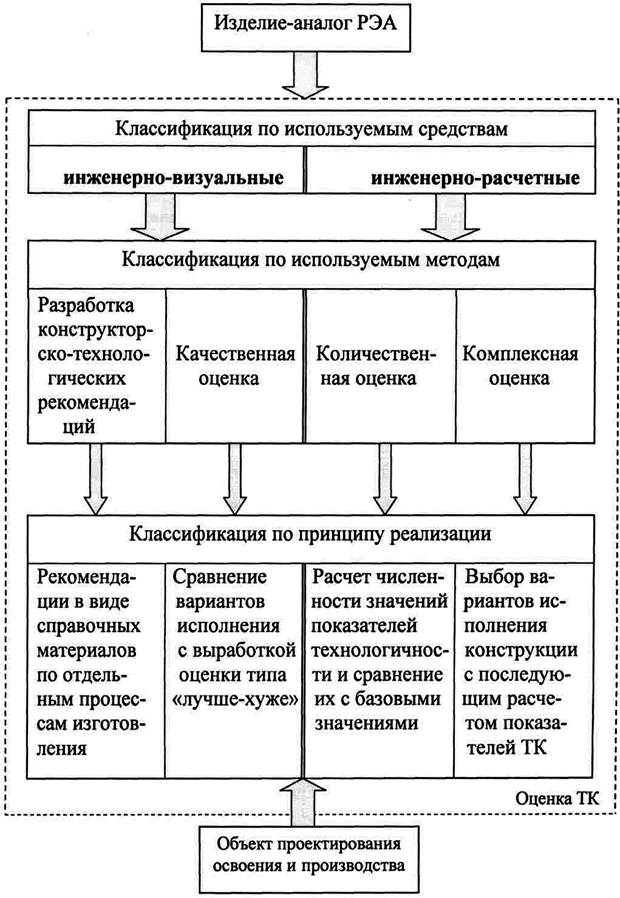

... приведен полный перечень и расчетные формулы используемых для оценки ТК РЭА количественных показателей. 3.2 Разработка информационного обеспечения системы показателей эффективной организации управленческого труда в организации и технологичности конструкции изделий и их составных частей Стандартами ЕСТПП введена система количественных оценок технологичности конструкций, охватывающая всю ...
0 комментариев