Навигация
Сумматор с параллельным переносом и автомат Мили
3854
знака
9
таблиц
6
изображений
|
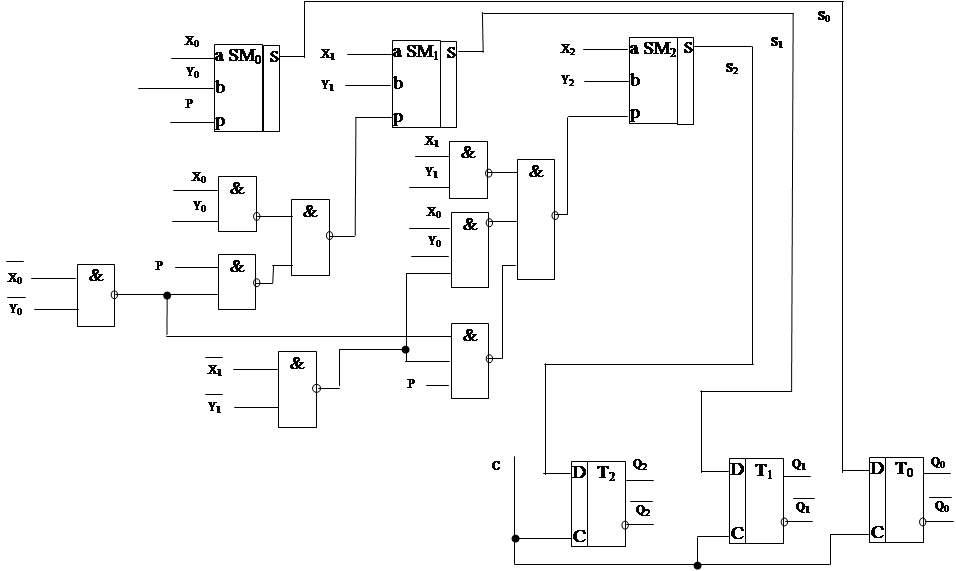
1. Используя одноразрядные полные сумматоры построить функциональную схему трехразрядного накапливающего сумматора с параллельным переносом.
РЕШЕНИЕ:
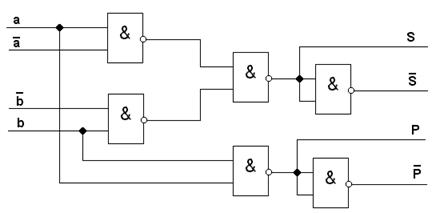
Одноразрядный сумматор рис.1 имеет три входа (два слагаемых и перенос из предыдущего разряда) и два выхода (суммы и переноса в следующий разряд).
|
| ||||||
| ai | bi | ci-1 | Si | Ci | ||
| 0 | 0 | 0 | 0 | 0 | ||
| 0 | 0 | 1 | 1 | 0 | ||
| 0 | 1 | 0 | 1 | 0 | ||
| 0 | 1 | 1 | 0 | 1 | ||
| 1 | 0 | 0 | 1 | 0 | ||
| 1 | 0 | 1 | 0 | 1 | ||
| 1 | 0 | 0 | 1 | ||
| 1 | 1 | 1 | 1 | 1 | ||
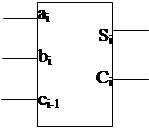 Таблица истинности одноразрядного сумматора.
Таблица истинности одноразрядного сумматора.Сумматоры для параллельных операндов с параллельным переносом разработаны для получения максимального быстродействия.
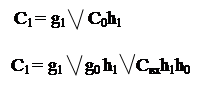
Для построения сумматора с параллельным переносом введем две вспомогательные функции.
Функция генерации – принимает единичное значение если перенос на выходе данного разряда появляется независимо от наличия или отсутствия входного переноса.
![]()
Функция прозрачности – принимает единичное значение, если перенос на выходе данного разряда появляется только при наличии входного переноса.
![]()
![]() Сформируем перенос на выходе младшего разряда:
Сформируем перенос на выходе младшего разряда:
На выходе следующего разряда:
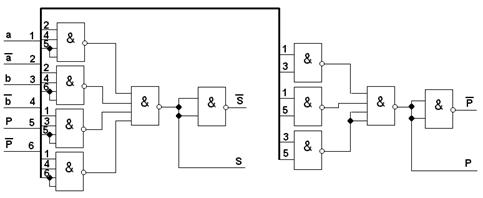
В базисе И-НЕ:
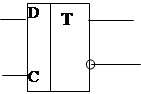
Накапливающий сумматор представляет собой сочетание сумматора и регистра. Регистр выполним на D-триггерах (рис. 2).
 | |||||
| |||||
|
2. 
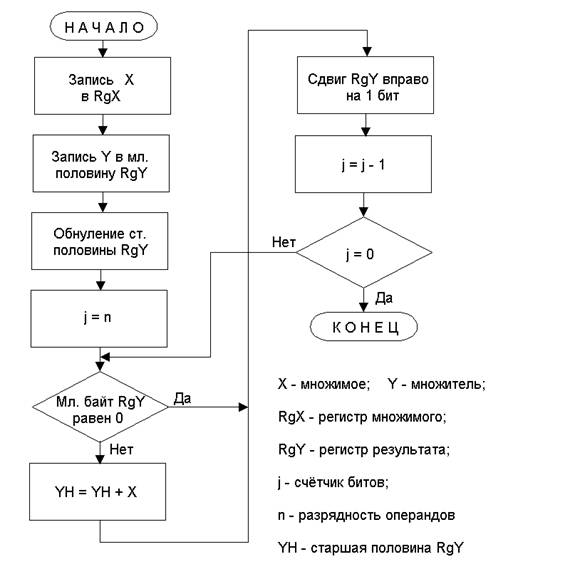
3. Построить схему электрическую принципиальную управляющего автомата Мили для следующей микропрограммы:
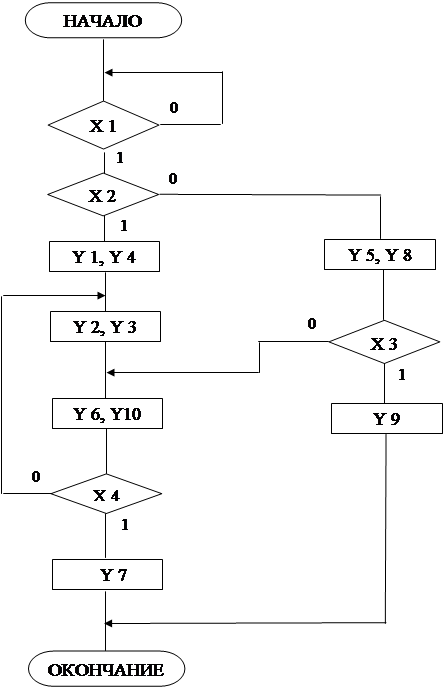
РЕШЕНИЕ:
1. Построение графа функционирования:
Управляющее устройство является логическим устройством последовательностного типа. Микрокоманда выдаваемая в следующем тактовом периоде, зависит от состояния в котором находится устройство. Для определения состояний устройства произведем разметку схемы алгоритма, представленной в микрокомандах (Рис. 1).
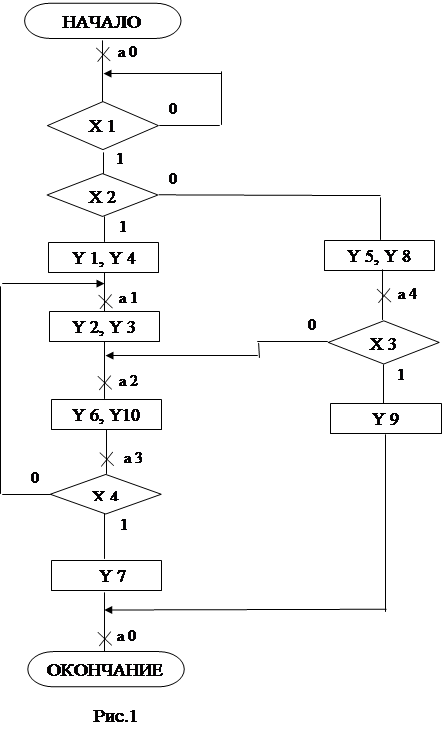
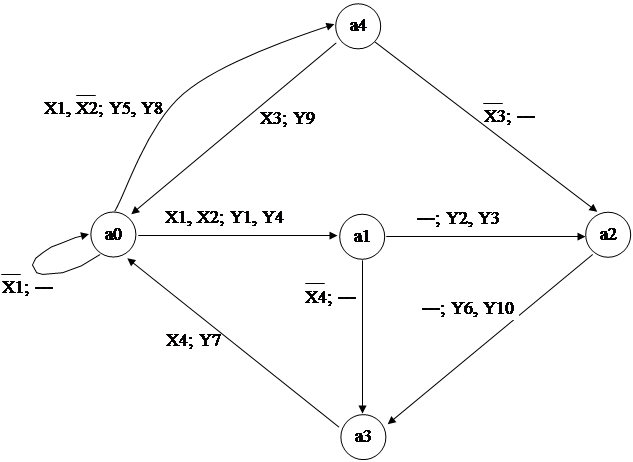
Полученные отметки а0, а1, а2, а3, а4 соответствуют состояниям устройства. Устройство имеет пять состояний. Построим граф функционирования.
Кодирование состояний устройства.
|
В рассматриваемом устройстве М = 5 k = 3. | Таблица 1 | |||
| Состояние | Кодовые комбинации | |||
| Q3 | Q2 | Q1 | ||
| а0 | 0 | 0 | 0 | |
| а1 | 0 | 0 | 1 | |
| а2 | 0 | 1 | 0 | |
| а3 | 0 | 1 | 1 | |
| а4 | 1 | 0 | 0 | |
Соответствие между состояниями устройства и кодовыми комбинациями зададим в таблице 1.
Похожие работы
... MK Совокупность МО Y1 y1,y2,y3 Y2 y2 Y3 y3 Y4 y4 Y5 y5 Y6 y4,y6 Y7 y7 Y8 y8 Y9 y1,y3 Каждой условной вершине содержательной ГСА поставим в соответствие один из входных сигналов управляющего автомата X1, … ,X9, список которых дан в таблице 6. Таблица 6 Входной сигнал УА X1 X2 X3 X4 X5 X6 X7 X8 X9 Логическое условие ОА ...
... в котором находится устройство. Для определения состояний устройства произведем разметку схемы алгоритма, представленной в микрокомандах (Рис. 1). Полученные отметки а0, а1, а2, а3, а4 соответствуют состояниям устройства. Устройство имеет пять состояний. Построим граф функционирования. Кодирование состояний устройства. В процессе кодирования состояний каждому состоянию устройства ...
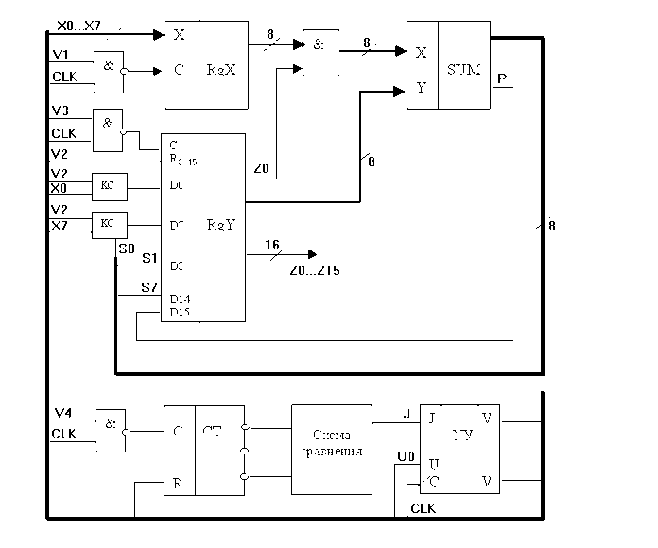
... RgХ и RgY имеют как прямые, так и инверсные выходы , что позволяет уменьшить количество элементов в сумматоре. Рисунок 2.2 Структурная схема АЛУ для умножения двоичных чисел. Как видно из схемы активный уровень сигналов управления - высокий, и устройство управления тактируется по фронту импульса, а исполнительные устройства - по спаду, что позволяет избежать гонок в схеме. 3 Синтез ...
0 комментариев