Частотная
характеристика
Критерий
устойчивости
Пропорциональные
регуляторы
(статические)
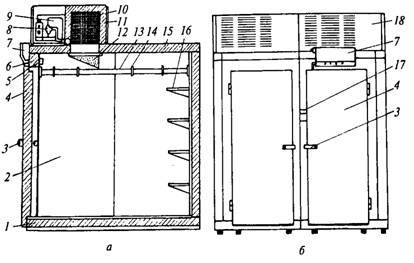
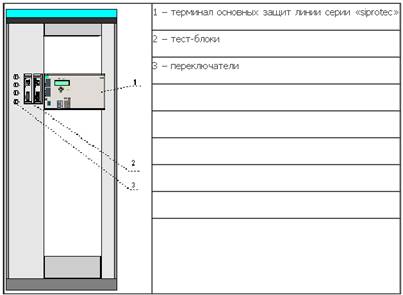
Z1,Z2
– обозначения
функционального
признака прибора.5
– номер позиционного
обозначения
Измерение
т-ур
Измерение
давления
Измерение
плотности
Автоматический
мост
Усилители
пневматические
и гидравлические
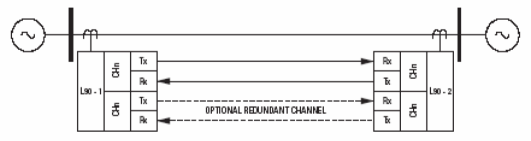
Структура
микропроцессорных
устройств
применяемых
для управления
оборудованием
Навигация
1. Основные понятия и определения
Автоматика – раздел технической кибернетики изучающей вопросы управления, а также создания оптимального использования технических средств управления и регулирования
Управление – процесс воздействия на объект с целью изменения его состояния для достижения поставленной цели, осуществляется регулятором
Технический объект – машина, прибор, система
Объект управления – характеризуется различными параметрами (Хвых – текущее значение регулируемого параметра в данный момент времени)
Совокупность управляющего устройства (регулятора) и объекта управления (регулирования) наз-ся системой автоматического управления
Ху – управляющее воздействие; УУ –управляющее устройство; Хз – заданное значение выходной величины; ОУ – объект управления
2. Классификация САР.
Автоматические системы управления делятся по назначению на:
1. Автоматические системы контроля технологических параметров (АСК)
2. Автоматические системы сигнализации (АСС)
3. Автоматические системы регулирования (АСР или САР)
4. Автоматические системы управления технологическими процессами (АСУТП)
5. Автоматические системы управления роботизированными комплексами (АСУРК)
6. Автоматические системы управления предприятием
3. 4. 5. Принцип регулирования САР (Замкнутые и разомкнутые САР)
АСР по принципу регулирования делятся на системы:
1. Регулирование по возмущению
2. Регулирование по отклонению
3. Комбинированное регулирование
Регулирование по возмущению (Разомкнутая система)
При регулировании по возмущению выделяется наиболее существенный возмущающий фактор, который измеряется и подаётся на вход автоматического регулятора
Достоинства такой системы: 1) Простота; 2) Малая инерционность (быстродействие системы)
Недостатки: 1) Не учитываются другие возмущающие факторы; 2) Не учитывается т-ра в помещении.
Регулирование по отклонению (Замкнутая система)
При регулировании по отклонению измеряется выходной параметр и подаётся на вход автоматического регулятора. В АР сравнивается заданное значение и действительное. Определяется ошибка регулирования Х=Хз-Хвых. И по величине ошибки вырабатывается регулирующее значение.
Достоинства: 1) Выработка регулирующего воздействия в независимости от возмущающего фактора; 2)Учёт действительного параметра и оценка ошибки
Недостатки: 1) Наличие ошибки регулирования; 2) Малое быстродействие; 3) Склонность системы к перерегулированию.
Перерегулирование – колебание регулируемого параметра около заданного значения.
Комбинированный принцип регулирования (Замкнутая система)
При комбинированном принципе имеется контур регулирования по отклонению и возмущению
Достоинства объединяются
Недостатки: 1) Большая стоимость; 2)Склонность к перерегулированию
6. Структура САР
ОУ – объект управления УПУ – усилительно-преобразовательное устройство
РО – регулирующий орган СЭ – сравнительный элемент
ИМ – исполнительный механизм З – задатчик
Система регулирования по отклонению и система комбинированного регулирования имеют контур обратной связи. Такие системы регулирования наз-ют замкнутыми.
8. Решение линейных диф-ых ур-ий САР и их передаточные ф-ции
Хвых общ(t) отражает переходный процесс и наз-ся переходной составляющей (или свободной составляющей)
Хвых частное(t) описывает установившейся процесс соответствующий новому значению входной и выходной величины (принуждённая составляющая)
В решении ур-ий используют метод преобразований Лапласа
При преобразовании Лапласа переменная t заменяется на комплексную переменную t с помощью интегрирования
После нахождения Хвых(t) пользуются обратным преобразованием Лапласа.
С1,С2…Сn – к-енты определяемые из начальных условий
p1,p2,…pn - корни характеристического ур-ия
9. Временные динамические хар-ки САР
При исследовании САР и отдельных элементов этих систем пользуются ступенчатым изменением входной величины. При этом ступенчатое воздействие входной величины принимают равное 1.
f(t)=Xвх = 0 при t0
Эта зависимость наз-ся единичной ф-цией имеющей след вид
Хвх=хвх/хвх0 хвх0 – базовая величина
Изменение выходной величины при единичном ступенчатом изменении входной величины наз-ся ф-цией h(t)
Хвх=А*1(t) Хвых - кривая разгона. Реакция выходной величины на ступенчатое воздействие не равное единичной ф-ции наз-ся кривой разгона.
У импульсной ф-ции площадь импульса = 1.
Изменнение
выходной величины
при воздействии
![]() ф-ции
на входе наз-ся
весовой ф-цией
(t); (t)=1’(t)
– яв-ся производной
единичной ф-ции
ф-ции
на входе наз-ся
весовой ф-цией
(t); (t)=1’(t)
– яв-ся производной
единичной ф-ции
Весовая
ф-ция (t)=
h’(t); h(t)=![]() (t)dt
(t)dt
Похожие работы
... метрологического надзора пригодными к применению. 4. Учет средств измерений и определение сроков эксплуатации приборов и взрывобезопасности возлагается на ответственное лицо по метрологическому обеспечению, назначенное распоряжением по АГЗС. 5. Приборы и устройства автоматики безопасности, автоматического регулирования и контрольно-измерительные приборы должны обеспечивать точность показаний, ...
... и измерительных приборов практически исчерпаны, поэтому для устранения данных недостатков необходимо оснащение РТУ стендами, позволяющими автоматизировать измерения параметров и характеристик электромагнитных реле железнодорожной автоматики. 4. Автоматизированные стенды для измерения и контроля параметров реле Разработка методов измерений и автоматизированных измерительных стендов (АИС) для ...
... в области пожарной автоматики, имеющих квалифицированных специалистов и развитую материально-техническую базу. Для большинства объектов железнодорожного транспорта возможное решение заключается в организации работ ТО и Р устройств пожарной автоматики собственными силами. Реализация данного положения позволит организовать качественное обслуживание устройств и значительно сократит расходы на ...
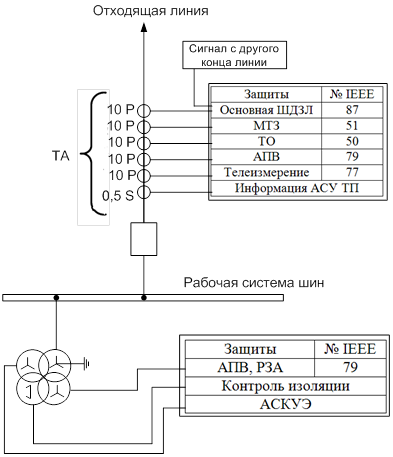
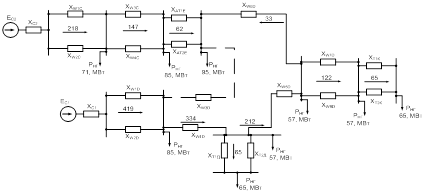
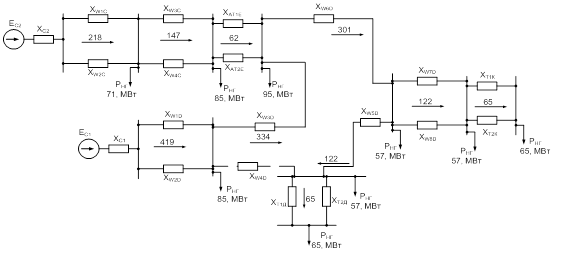
... на отключение выключателя автотрансформатора; · Работа АПВ аналогична нормальному режиму работы; · Подаётся сигнал на сохранение отслеживаемой информации, записываемой автоматикой регистрации аварийных событий. 7. Расчёт токов короткого замыкания Расчёт токов к.з. необходимо производить для правильной настройки релейной защиты. Настройку РЗ необходимо производить по максимальному и ...
0 комментариев