Навигация
Управление - относится к математической движением технической системы.
Необходимо написать алгоритм, по которому некоторая система управляется с помощью энергетического воздействия, например : летательный аппарат управляется с помощью рулевой машины. Оказывается создать управление это не очень сложно и это можно сделать интуитивно. Однако создать оптимальное управление чрезвычайно сложно.
Теория оптимизации - это наука о наилучших алгоритмах (управления) созданных по некоторому критерию качества
Критерий качества - создание (абстрактное) некоторой функции риска, которая должна быть в процессе оптимизации минимизированна (экстремальная задача).
Управление бывает оптимальным и квазиоптимальным.
Оптимальное - на бумаге,
Квазиоптимальное - реальное, стремится к идеальному.
Управление бывает :
1) Программное
С помощью отрицательной обратной связи
Программное управление –
требуется создать программу, которая дает оптимальную траекторию (заложена в ЭВМ) движения некоторой системы.
Пример 1 : Перевод летательного аппарата из точки А в
точку В.
Критерий - минимизировать расход горючего.
Для реализации такой задачи создано две системы - Novstar
(США) и Глонасс (Россия), стоимость их очень высока.
Пример 2 : Надо создать такую траекторию, чтобы шарик скатился из точки ‘А’ в точку ‘В’ за минимальное время.
А
А - Оптимальная
В В траектория
Управление с помощью отрицательной обратной связи
Отрицательной обратной связью - называется передача энергии с выхода на вход некоторой управляемой системой
вх + Система вых
обратная связь
Бывает два вида обратной связи : Положительная ОС и отрицательная ОС.
Отрицательная ОС уменьшает входное воздействие на систему пропорционально выходному отклику (демпфирует систему в целом).
Автоматика - наука изучающая теорию анализа и синтеза
систем управления (корректировка движения, оптимизация переходных процессов) и создание оптимального управления.
Радиоавтоматика - наука, изучающая вопросы управления
движением радиотехнических систем.
Структурная схема системы радиоуправления :
Радио- ѕѕ® Устройство ѕ-ѕ® Объект ѕ® Датчик
приемник Управления Управления
ООС
Радиоприемное устройство - устройство выделения сигнала
по некоторому радиоканалу.
Особенность выделения сигнала состоит в том, что сигнал выделяется на фоне внутренних шумов и помех.
Внутренние шумы - тепловые шумы, которые всегда имеют
место в радиоприемном устройстве.
Таким образом в радиоавтоматике случайные процессы изучаются особо (шум, помеха, сама траектория движения)
Устройство управления - как правило - вычислительная сис-
тема с приводом и энергетической
установкой.
Привод - преобразователь механических колебаний в элек-
трические.
Объект управления - некоторая динамическая система.
Динамическая система - система, которая описывается ли-
нейными и нелинейными дифферен-
циальными уравнениями высокого
порядка.
Датчик - устройство, которое измеряет положение летатель-
ного аппарата в пространстве.
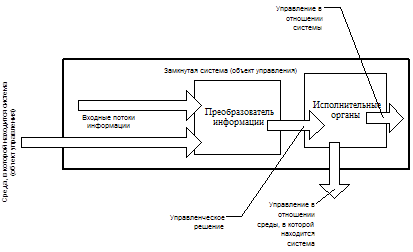
Глава 1 Стохастическое управление
В случае стохастического управления, управляемые процессы являются случайными (стохастическими). Начальная точка управления А и конечная В не известны. В этом случае сам
управляемый процесс описывается стохастическими уравнени-
ями, которые, как правило, апроксимируются марковскими процессами.
Примеры систем автоматического управления
Системы автоматического управления можно описать прибли-
женно используя линейные или нелинейные дифференциальные
уравнения (детерминированный подход без учета шумов).Это
было до 60х годов: все подходы были стохастические линейные и нелинейные дифференциальные уравнения.
Пример 1 (детерминированный)
Управление движением космического аппарата в грави-
тационном поле земли (задача двух тел).
В геоцентрической системе координат
Z r - расстояние от центра земли
З - центр земли (вся ее масса)
К.А.
r К.А. - космический аппарат
X На космический аппарат действует
З притяжение :
Y F2 ;
К.А. F2 - управляющая сила
F3 - сопротивление среды
;
Третий закон Ньютона :
F3 F1
Если это уравнение спроектировать на оси ко-
ординат, то получим следующие три уравнения :
(1)
(1)- система линейных дифференциальных уравнений 2-го по-
рядка, которая описывает движение космического аппа-
рата.
Силы U1,U2,U3 - силы управления.
{x(t),y(t),z(t)} r(t) - траектория
Оказывается, что в зависимости от начальных условий и па-
раметров K1,K2,K3 траектория r(t) может быть круговая,
эллипсоидная, параболическая.
Пример 2 : Нелинейная система. Описывается нелинейным дифференциальным уравнением.
Генератор колебаний :
Можно показать, что процесс
x(t) описывается дифферен-
x(t) циальным уравнением 2-го
M порядка с нелинейным
членом .
R
C L L
C Если емкость варьировать,
то может стать ну-
лем и тогда мы получим си-
нусоидальное колебание:
x(t)=a sin(wt+j)
(автоколебания)
Если - положительно, то амплитуда колебаний увели-
чивается с течением времени.
Если - отрицательно - амплитуда колебаний уменьша-
ется с течением времени до нуля.
Глава 2
Математическое описание систем (детерминированная терия) (идеальный случай)
Линейные системы, которые описываются дифференциальными
уравнениями называются динамическими системами.
Если система описывается алгебраическими уравнениями -
- это описание состояния равновесия (статические системы)
По определению
(1)
(1)- линейное дифференциальное уравнение n-го порядка.
Правая часть - это дифференциальное уравнение воз-
действия. Если Ly=0 (2) ,то Ly=Px.
(2)- однородное дифференциальное уравнение - описывает
линейные динамические системы без воздействия на
них. Например колебательный контур.
Правая часть уравнения (1) описывает воздействие на ли-
нейную систему или называется управлением.
Ly=x - управление.
Если есть часть Px - то это сложное управление, учитыва-
ющее скорость, ускорение.
Передаточная функция линейной системы
От дифференциального уравнения (1) можно перейти к линей-
ной системе, т.е. к некоторому четырехполюснику.
Вх W(p) Вых
Этот четырехполюсник можно создать на элементной базе или
смоделировать на ЭВМ.
От дифференциального уравнения (1) к W(p) можно перейти
двумя путями - используя символический метод и 2-е прео-
бразование Лапласа.
Сивмолический метод Хиви Сайда.
Применив символический метод к (1) получим :
(3)
Формула (3) представляет собой отношение двух полиномов -
описание передаточной функции.
Использование преобразования Лапласа
- преобразование Лапласа, p=jw
Если мы применим преобразование Лапласа к левой части (1)
и учитывая, что , получим :
(4)
X(p) Y(p)
W(p)
Если правая часть передаточной функции простейшая -
, то воздействие обычное. Передаточ-
ная функция будет иметь вид :
(5) , где знамена-
тель дроби есть характеристическое уравне-
ние.
Пример : Дифференциальное уравнение 2-го порядка описы-
вается передаточной функцией :
(6)
Для нахождения решения дифференциального уравнения снача-
ла необходимо решить следующее уравнение :
Известно, что дифференциальное уравнение 2-го порядка
имеет решение в виде комплексной экспоненты или действий
над ней. (Это зависит от корней характеристического урав-
нения). Если корни комплексные, тогда решение будет :
(7) wt+wt)
Если корни ±a + jw решение будет (7)ў
(7) и (7)’ - решение в виде нарастающей или затухающей синусоиды, либо обычной синусоиды, если a=0.
Устойчивость линейных систем
Линейная система полностью описывается передаточной функ-
цией, которая представляет собой :
в комплескной плоскости
p=s+jw . Эти полиномы получены из дифференциальных урав-
нений путем преобразования Лапласа.
Ставится проблема: как исследовать систему с помощью W(p)
Оказывается, что это проще сделать чем исследовать диффе-
ренциальные уравнения. Исследование по W(p) производится с помощью анализа полюсов и нулей.
Полюсом называется то значение корня уравнения в знаменателе, при котором Q(p)=0.
Количество корней определяется степенью полинома. Если
корни комплексно-сопряженные, то в точке, где Q()=0,
W(p)=Ґ - полюс.
Нулями W(p) называются точки на комплексной плоскости,
где полином P(p)=0.
Количество нулей определяется порядком поли-
нома.
jw
s > 0 полюсы
сопряж. пара ®
s > 0
- полюсы (корни характеристического урав-
нения). Если корни комплексные, то они сопряженные.
Выводы :
Похожие работы
... за собой её гибель, либо требующие подключения к процессу самоуправления суперсистемы иерархически высшего управления. Так соборный интеллект видится индивидуальному интеллекту с точки зрения достаточно общей теории управления; возможно, что кому-то всё это, высказанное о соборных интеллектах, представляется бредом, но обратитесь тогда к любому специалисту по вычислительной технике: примитивная ...


... выбрать наилучший вариант из возможных в решении проблем управления. 5. Скорость обработки информации и принятие управленческих решений. Количественный подход дал толчок развитию теории управления запасами, теории массового обслуживания, теории принятия управленческого решения. 23. Характеристика современных подходов к управлению. 2 подхода: 1. Системный – это способ мышления по ...
... важности человеческого фактора; использовании интеллектуального потенциала; преобладании психологических социальных факторов и групповых норм поведения. Начиная с 70-х годов, стала развиваться ситуационная теория управления. Ее главной особенностью является стремление к достижению согласованности между организационной и поведенческой сторонами управления в зависимости от характера производства и ...
... эффективность инвестиций в рекламу? Желая получить ответ на возникший вопрос, руководитель попадает в одну из двух ловушек: утверждается в бесполезности теории управления для решения его практической задачи; находит простое и, естественно, неправильное решение, после чего либо попадает в первую ловушку, либо продолжает поиск волшебных таблеток. Кроме того, многие руководители не хотят ...
0 комментариев