Навигация
Генетический алгоритм глобальной трассировки
25665
знаков
1
таблица
5
изображений
О.Б. Лебедев
1 Введение
Основной целью задачи глобальной трассировки является равномерное и целесообразное распределение ресурсов коммутационного поля для создания благоприятных условий для последующей детальной трассировки.
Большинство алгоритмов, глобальной трассировки осуществляют последовательное построение соединений на укрупненной модели КП (волновые, лучевые, базирующиеся на построении деревьев Штейнера). [1,2,3,4,5,6,7]. Хотя на каждом шаге для каждого текущего состояния среды алгоритмы дают неплохие результаты, «камнем преткновения» является последовательность трассируемых соединений. Цепи, проложенные раньше ,могут блокировать цепи ,прокладываемые позже.
Другим недостатком является то, что большинство алгоритмов используют критерии в большей степени учитывающие параметры соединений (например: общая длина) и в меньшей степени параметры коммутационного поля, что не совсем согласуется с главной целью глобальной трассировки.
Исходя из этих соображений, в работе используется комбинаторный подход, основанный на методах генетической адаптации, при котором в один и тот же момент времени рассматриваются все соединения, а критерий учитывает распределение ресурсов КП.
При разработке генетических процедур основное влияние уделялось разработке с учетом знаний о предметной области методов кодирования решений, модификации генетических операторов и организации эволюционного процесса.
2. Проблемная формулировка, термины и обозначения
Для решения задачи глобальной трассировки используется графовая модель G = (X, U). Коммутационное поле разбивается на области. Вершины графа xi Î Х соответствуют областям на КП. Если области соседние, то вершины xi и xк, соответствующие этим областям, связываются ребром uj. Пусть задано множество цепей Т={ti| i = 1, 2, ...}. Для каждой цепи определяется множество областей, в которых существуют контакты, связываемые этой цепью. На графовой модели G, множеству областей, связываемых цепью xi, соответствует подмножество вершин Хi Ì Х. Для каждого ребра ui,связывающего вершины, задается вес aj, равный пропускной способности между областями, соответствующими вершинам xi и xk. Будем считать, что граф G метризирован, то есть каждая вершина имеет координаты. Координаты вершины принимаются равными координатам центра соответствующей области. Если области имеют один и тот же размер, то граф G представляет собой ортогональную решетку.
Далее для каждой цепи ti на множестве вершин Хi графа G строится минимальное связывающее дерево Di с помощью алгоритма Прима Di={rk | k=1,2, … ,nk}, где rk – ребро минимального связывающего дерева.
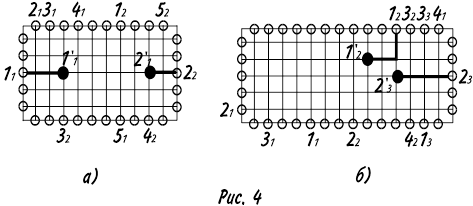
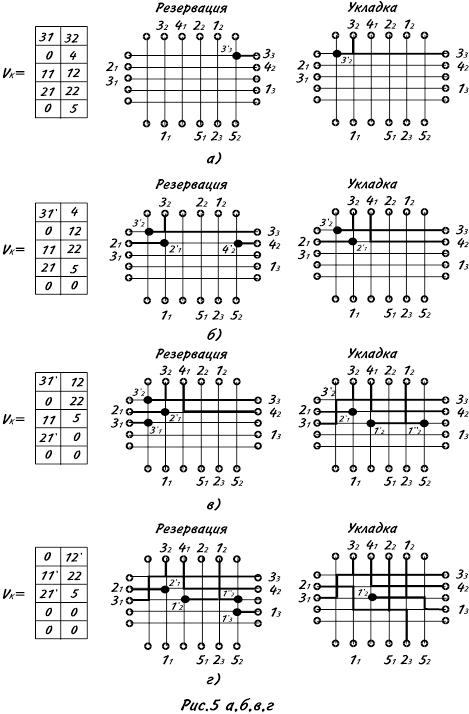
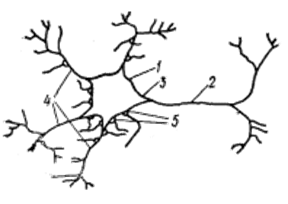
Для каждого ребра rk ÎDi формируется набор Vk вариантов vik маршрутов, связывающих на графе G соответствующие вершины. Формирование возможных маршрутов осуществляется следующим образом. Для ребра rkÎDi, связывающего xnÎG и xmÎG, определяется множество вершин ХkÌ X, смежных вершинам хnи хm ребра rk,. Через множество вершин Хк , а так же через вершины xn и xm проводятся новые вертикальные и горизонтальные линии.Отметим, что эти линии проходят по ребрам ортогонального графа G. В узлах пересечения этих линий лежат некоторые вершины хi Î Х. Эти вершины являются узловыми для формирования вариантов. Будем считать, что варианты маршрутов проходят по тем ребрам графа G, которые лежат на этих линиях, рис 1.
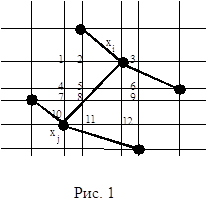
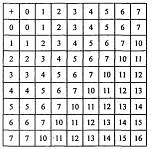
Например: сформируем набор вариантов для ребра гк, связывающего вершины хi и хj. Пронумеруем узлы пересечения вертикальных и горизонтальных линий. Вершина хi лежит в узле 3, а вершина хj в узле 10. Для данного ребра гk существует 10 вариантов прохождения маршрута Vk = {vk1, vk2, vk3, vk4, vk5, vk6, vk7, vk8, vk9, vk10}
vk1 = {3, 2, 5, 8, 11, 10}; vk2 = {3, 6, 5, 8, 11, 10}; vk3 = {3, 6, 9, 8, 11, 10}; vk4 = {3, 6, 9, 12, 11, 10}; vk5 = {3, 2, 1, 4, 7, 10}; vk6 = {3, 2, 5, 4, 7, 10}; vk7 = {3, 6, 5, 4, 7, 10}; vk8 = {3, 2, 5, 8, 7, 10}; vk9 = {3, 6, 5, 8, 7, 10}; vk10 = {3, 6, 9, 8, 7, 10}
Такой способ обеспечивает максимальное совпадение вариантов реализации ребра rkс вариантами ребер, смежных ребру rk. Формирование варианта осуществляется из следующих соображений:
вариант формируется таким образом, чтобы он был минимальной длины.
варианты формируются, чтобы обеспечивалось максимально возможное совпадение вариантов различных ребер одной цепи друг с другом.
Пусть имеется некоторое решение задачи глобальной трассировки, заключающееся в том, что для всех ребер гk всех МСД-цепей, выбраны варианты их реализации. Введем некоторые обозначения. Обозначим через bi число цепей, проходящих по ребру ui графа G. Для каждого ребра ui графа G введем параметр сi, равный сi = ai - bi.
Найдем в графе G ребро, у которого сi имеет минимальное значение, и обозначим его через сmin, то есть cmin ® "i[cmin £ ci].
Для нашей задачи цель оптимизации – максимизация параметра сmin. При перезагрузках параметр сmin может принимать отрицательное значение. Для оценки качества удобнее использовать критерий, который имеет только положительные значения. Обозначим через am – максимально возможное значение показателя ai среди всех ребер ui графа G, т.е. am ® ("i)[ am ³ ai]. В силу этого величина am– cmin никогда не может быть отрицательной, т.е. am– cm³ 0. Отметим, что am является константой.
В качестве фитнесса (оценки качества) индивидуальности будет использоваться критерий
![]()
Цель оптимизации – максимизация F1.По своей сути максимизация F1 совпадает с максимизацией cmin.
В качестве другого критерия оптимизации можно использовать другую характеристику. Обозначим через g число ребер графа G для которых ci имеет отрицательное значение. Очевидно, что целью генетического поиска должен быть поиск решения (индивидуальности) у которого g имеет минимальное значение.
Пусть m – число всех ребер графа G. Введем фитнесс F2=m - g.
Цель оптимизации в таком случае – максимизация F2
Если при оптимизации по критерию F1 не удается найти такого решения при котором у всех ребер ui Î G, соответствующие им сi имеют положительные значения, то оптимизация по критерию F2 минимизирует число таких ребер. Это делается из следующих соображений: чтобы обеспечить 100% реализацию (разводки) соединений, потребуется меньшее число деформаций областей или границ.
Обозначим через j число ребер всех цепей, для которых выбранные и реализованные варианты соединений включают ребра ui графа G с отрицательными значениями сi.
Пусть Nd – общее число ребер всех максимальных связывающих деревьев.
Введем третий критерий оптимизации: F3=Nd - j
Цель оптимизации заключается в максимизации F3. Это обеспечивает минимальное число соединений, требующих перетрассировки, т.е. оптимизация по F3 уменьшает число перетрассируемых соединений. Если при оптимизации по F1, имеются ребра с отрицательными сi, то в зависимости от метода дотрассировки, деформации областей или границ, используется критерий F2 или F3.
Похожие работы
... оценкой качества служит критерий: где li суммарная длина реализованной (протрассированной) цепи ni и L - суммарная длина всех цепей. 2. Генетический алгоритм трассировки в коммутационном блоке Особенностью генетического алгоритма, моделирующего процесс естественной эволюции, является то, что оперирование производится с кодами решений. Каждому решению соответствует одна ...

... производительных сил, тем быстрее повышается Б. населения. В еще большей степени Б. связано с эффективностью социально-экономической политики в данном обществе. Информатика как наука. Предмет и объект прикладной информатики. Системы счисления Инфоpматика — это основанная на использовании компьютерной техники дисциплина, изучающая структуру и общие свойства информации, а также закономерности и ...
... ребрами) изображают конструктивные и потоковые функциональные структуры [14]. Принципы построения функциональных структур технических объектов рассматриваются в последующих главах курса "Основы проектирования им конструирования" не включенных в настоящее пособие. Для систем управления существуют характеристики, которые можно использовать в качестве критериев для оценки структур. Одна из них - ...

... обучения, yi и yj –выходные сигналы i-го и j-го нейронов. В настоящее время существует множество разнообразных обучающих правил (алгоритмов обучения). Глава IV Может ли компьютер мыслить? 4.1 Реально ли компьютерное мышление? Наконец я подошел к заключительной главе своей работы. В предыдущих главах была изложена сущность построения систем искусственного интеллекта, было рассказано о ...
0 комментариев