Способы получения уравнений состояния реальных физических объектов ничем не отличаются от способов описания этих объектов с помощью дифференциальных уравнений. Уравнения состояния записываются на основе физических законов, положенных в основу работы объекта.
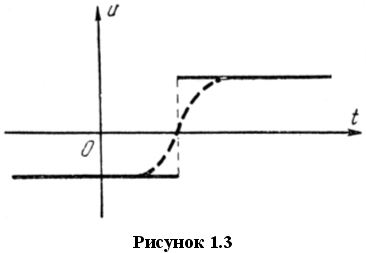
Рассмотрим электромеханическую систему, состоящую из двигателя постоянного тока с независимым возбуждением, работающего на инерционную нагрузку с вязким трением. Управляющим воздействием для двигателя считаем напряжение на якоре U(t), выходной координатой, угол поворота вала двигателя y(t)=j(t). Уравнение электрической цепи имеет вид
![]() ,
,
где ![]() - противо ЭДС,
- противо ЭДС, ![]() - угловая скорость вала двигателя,
- угловая скорость вала двигателя, ![]() - единый электромагнитный коэффициент.
- единый электромагнитный коэффициент.
Уравнение моментов будет иметь следующий вид
![]() ,
,
где ![]() , J - момент инерции нагрузки, приведенный к валу двигателя, f - коэффициент вязкого трения.
, J - момент инерции нагрузки, приведенный к валу двигателя, f - коэффициент вязкого трения.
Выберем следующие переменные состояния: х1=i, x2=w, x3=j.
Получим
![]() ,
,
![]() .
.
Запишем эти уравнения относительно переменных ![]() ,
, ![]() ,
, ![]()
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
Запишем матричные уравнения
![]() ,
,
![]() ,
,
где
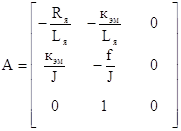 ,
, 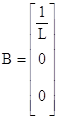 ,
, ![]() .
.
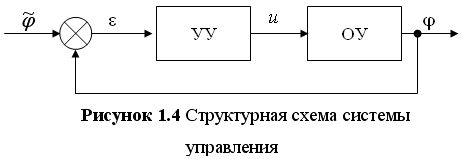
Рассмотрим структурную схему электромеханической системы с двигателем постоянного тока, работающего на инерционную нагрузку с вязким трением.
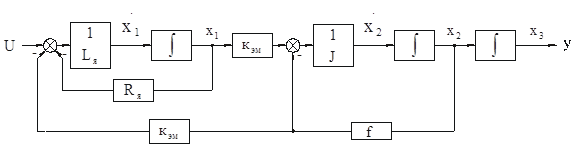
Рис. 2.1. Структурная схема электромеханической системы с двигателем постоянного тока
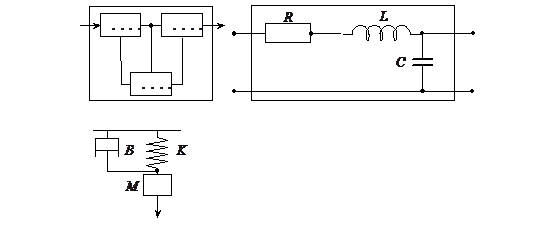
Запишем уравнение состояния для механической системы, представляющей собой груз массой m, подвешенный на пружине и соединенный с гидравлическим демпфером. К грузу приложена сила P(t), выходная переменная перемещения x(t), управляющие воздействия U(t)=P(t). Уравнение движения груза получаем из уравнения равновесия сил
![]() ,
,
где ![]() - инерционная сила, f - коэффициент вязкого трения,
- инерционная сила, f - коэффициент вязкого трения, ![]() - сила сопротивления демпфера,
- сила сопротивления демпфера, ![]() - сила сопротивления пружины.
- сила сопротивления пружины.
Выбираем в качестве переменных состояния x(t) и ![]() - перемещение и скорость перемещения соответственно.
- перемещение и скорость перемещения соответственно.
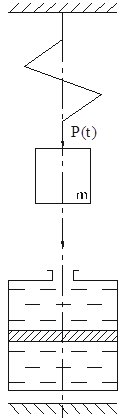
Рис. 2.2. Механическая система, включающая в своем составе пружину, массу и вязкий демпфер
Так как дифференциальное уравнение имеет второй порядок, то и количество переменных состояния будет равно двум. Исходное уравнение движения груза можно записать в виде двух уравнений
где U(t)=P(t) - управляющее воздействие.
Добавим к этим уравнениям следующее уравнение выхода
![]() .
.
Эти уравнения представляют собой уравнения состояния приведенной механической системы. Запишем эти уравнения состояния в матричном виде
 ,
,
 .
.
Запишем это уравнение в другом виде
![]() ,
,
![]() ,
,
где  ,
,  ,
,  ,
, ![]() ,
, ![]() .
.
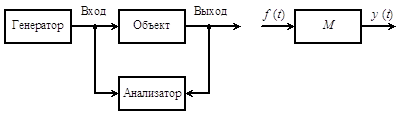
С данным уравнением состояния можно сопоставлять следующую структурную схему, где двойными линиями показаны векторные переменные.
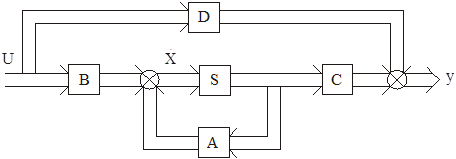
Рис. 2.3. Структурная схема
Пример: Рассмотрим электрическую цепь и получим уравнение состояния RLC цепи
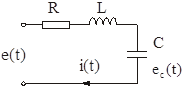
Рис. 2.4. RLC цепь
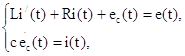
Динамическое поведение этой электрической системы полностью определяется при t³t0, если известны начальные значения: i(t0), ec(t0) и входное напряжение e(t) при t³t0, следовательно, эта система полностью определяется переменными состояния i(t) и ec(t). При указанных переменных состояния i(t) и ec(t) имеем следующие уравнения
где ![]() ,
, ![]() .
.
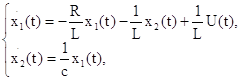
Введем следующие обозначения

В соответствии с этими обозначениями получаем
причем ![]() .
.
Следовательно, для электрической цепи запишем эту систему в векторно-матричном виде
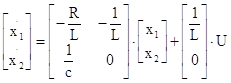 ,
,
.
Запишем матричные уравнения
![]() ,
,
![]() ,
,
где 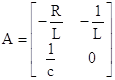 ,
,  ,
, ![]() ,
, ![]() .
.
Похожие работы

... проектирования. Целью проекта является создание программного продукта (ПП), основанного на математическом пакете MatLab, реализующего математическую модель системы управления, построенной на основе оптимального закона, для системы слежения РЛС. Данный проект можно отнести к научно-исследовательской работе, которая принадлежит к типу прикладных, направленных на решение научных проблем с целью ...

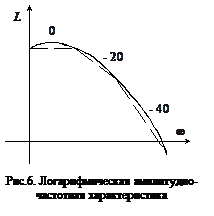
... цепи W1(s) = Wp(s) представлено как параллельное соединение простейших звеньев. 2.9 Неопределенность моделей систем управления Математические модели не отражают исчерпывающим образом динамические свойства систем управления в силу идеализации и упрощений, неизбежных при моделировании, неточной реализации алгоритмов управления и изменений характеристик объектов и других элементов в ...
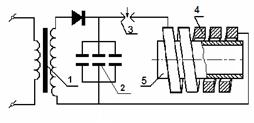
... влияния неодновременного включения блоков конденсаторных батарей. При этом рассматривался процесс обжима трубчатых заготовок из алюминиевого сплава АМг2М диаметром 27 мм, 57 мм, 87 мм и толщиной 1,2 мм одновитковым, четырехвитковым цилиндрическим, индуктором-концентратором. Рассматривалось пять типов магнитно-импульсных установок основные характеристики, которых приведены в табл.5.1. Таблица ...

... функциональных возможностей; - улучшение эргономических качеств; - улучшение эстетических качеств; - повышение чувствительности, точности, стабильности, диапазона. Цели и задачи автоматизации производственных систем Автоматизация - это совокупность организационно-технических мероприятий, обеспечивающих замену физического и умственного труда человека, затрачиваемого на планирование, ...
0 комментариев