Навигация
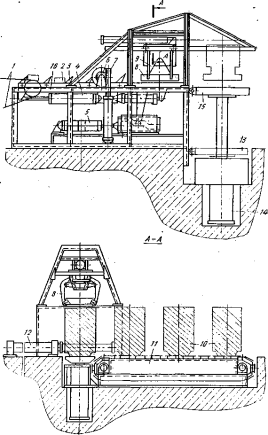
Механизмы качающегося конвейера
21008
знаков
12
таблиц
12
изображений
1. Динамический синтез рычажного механизма
Динамический синтез рычажного механизма по коэффициенту неравномерности движения сводится к определению момента инерции маховика, обеспечивающего приближенно равномерное движение звена приведения.
1.1. Исходные данные
Механизм качающегося конвейера (рис 1.)
Таблица 1.
| Размеры звеньев рычажного механизма | Частота вращения электродвигателя | Частота вращения кривошипа 1 | Массы звеньев механизмов | ||||||
| ОА | AB | BC | BD | nДВ | n1 | m2 | m3 | m4 | m5 |
|
| |||||||||
| м | м | м | м | об/мин | об/мин | кг | кг | кг | кг |
| 0.12 | 0.46 | 0.39 | 1.5 | 1350 | 70 | 18 | 20 | 100 | 500 |
Продолжение таблицы1
| Момента инерции звеньев | Сила сопротивления при движении слева на право | Сила сопротивления при обратном ходе | Коэффициент неравномерности вращения кривошипа | |||
|
|
|
|
| Pc1 | Pc2 | d |
|
|
|
|
| кН | кН |
|
| 1,2 | 0,5 | 1,2 | 40 | 1,5 | 4,0 | 0,06 |
Рисунок 1.
1.2. Построение положений механизма.
Для выполнения построения планов механизма выбираем масштабный коэффициент длин, определяемый по формуле:
где lOA- действительная длина звена ОА, м; OA – изображающий ее отрезок на чертеже, мм.
В левой верхней части листа строим 12 положений механизма, с шагом через 30 о. За первое начальное положение принимаем такое положение, при котором звенья 1 и 2 образуют одну прямую ОВ по длине равную ОВ=ОА+АВ.
1.3. Построение планов скоростей и определение действительных значений скоростей точек.
Найдем угловую скорость звена 1:
![]()
Определяем линейную скорость точки А:
![]()
По условию ![]() , следовательно линейная скорость точки А при всех положениях механизма будет одинаковой.
, следовательно линейная скорость точки А при всех положениях механизма будет одинаковой.
Строим план скоростей для второго положения механизма (т.к. при первом положении механизма будет присутствовать только скорость точки А, а остальные скорости точек будут равны 0).
На листе чертежа произвольно выбираем полюс скоростей Pv, и из полюса проводим отрезок длиной 44 мм перпендикулярно звену ОА, который является графическим аналогом скорости точки А. В конце вектора скорости обозначаем точку а.
Назначаем масштабный коэффициент плана скоростей по формуле:
Определяем скорости точки В. Для определения скоростей точки В составляем систему уравнений:
Решая систему уравнений получим:
![]()
где, VA-известно по направлению и значению; VBA-неизвестно по значению, но известно по направлению; VBC- неизвестно по значению, но известно по направлению.
На плане скоростей из конца вектора VA проводим прямую перпендикулярно звену AB.
Из полюса скоростей PV проводим прямую перпендикулярно звену ВС. На их пересечении обозначаем точку b. Вектор ab- графический аналог скорости VBA и вектор PVb- графический аналог скорости VBC=VB.
Находим действительные значения VBA и VB:
![]()
![]()
Определяем скорости точки D. Для определения скоростей точки D, составляем уравнение:
![]()
где: VB-известно по направлению и по значению; VDB- известно по направлению, но неизвестно по значению; VD- известно по направлению, но неизвестно по значению. На плане скоростей из точки b проводим прямую, перпендикулярно звену BD. Из полюса скоростей Pv из проводим горизонтальную прямую (т.к. ползун 5, движется поступательно). На пересечении этих прямых обозначаем точку d. Вектор PVD- графический аналог скорости VD и вектор bd- графический аналог скорости VDB.
Находим действительные значения VD и VDB:
![]()
![]()
Определяем скорости точек центров масс звеньев. По условия, центры масс (на схеме механизма обозначены как S2, S3, S4, S5 ) находятся посередине звеньев ![]() .
.
Определяем скорость точки S2. Из полюса скоростей PV, проведем прямую через середину отрезка ab и обозначим точку S2. Вектор PvS2 , будет графическим аналогом скорости VS2.
Определяем действительное значение скорости VS2:
![]()
Определяем скорость точки S3. Скорость точки S3 будет находиться на середине отрезка PVb. Обозначим точку S3. Вектор PvS3 , будет графическим аналогом скорости VS3.
Определяем действительное значение скорости VS3:
![]()
Определяем скорость точки S4. Из полюса скоростей PV, проведем прямую через середину отрезка bd и обозначим точку S4. Вектор PvS4 , будет графическим аналогом скорости VS4.
Определяем действительное значение скорости VS4:
![]()
Определяем скорость точки S5. Так как точка S5 совпадает с точкой D, то и скорости VD и VS5 будут равны. Следовательно, скорость VS5=0,74 м/с.
Определяем угловые скорости w звеньев механизма для данного положения.
Звено 1.
По условию w1 =const, следовательно у звена 1 угловая скорость во всех положениях будет постоянной:
![]()
Звено 2.
Угловая скорость звена 2 определяется по формуле:
где: ab – длина отрезка на плане скоростей, мм ; lAB – действительная длина звена 2, м;
mV – масштабный коэффициент плана скоростей.
Звено 3.
Угловая скорость звена 3 определяется по формуле:

где: cb – длина отрезка на плане скоростей, мм ; lBC – действительная длина звена 3, м;
mV – масштабный коэффициент плана скоростей.
Звено 4.
Угловая скорость звена 4 определяется по формуле:

где: bd – длина отрезка на плане скоростей, мм ; lBD – действительная длина звена 4, м;
mV – масштабный коэффициент плана скоростей.
Аналогично строятся планы скоростей и определяются скорости звеньев и точек для остальных положений механизма. Полученные значения заносим в таблицу 2.
Таблица 2.
|
| Положения механизма | ||||||||||||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | ||
| VA | м/с | 0.88 | 0.88 | 0.88 | 0.88 | 0.88 | 0.88 | 0.88 | 0.88 | 0.88 | 0.88 | 0.88 | 0.88 |
| VB | м/с | 0 | 0.73 | 1.0 | 1.02 | 0.89 | 0.67 | 0.37 | 0 | 0.49 | 1.18 | 1.79 | 1.24 |
| VBA | м/с | 0 | 0.184 | 0.24 | 0.54 | 0.77 | 0.94 | 0.99 | 0 | 0.46 | 0.42 | 1.59 | 1.75 |
| VD | м/с | 0 | 0.74 | 0.96 | 0.89 | 0.68 | 0.44 | 0.22 | 0 | 0.3 | 0.84 | 1.56 | 1.23 |
| VDB | м/с | 0 | 0.016 | 0.15 | 0.35 | 0.45 | 0.41 | 0.26 | 0 | 0.34 | 0.68 | 0.57 | 0.016 |
| VS2 | м/с | 0 | 0.81 | 0.94 | 0.92 | 0.8 | 0.62 | 0.45 | 0 | 0.67 | 1.02 | 1.17 | 0.63 |
| VS3 | м/с | 0 | 0.37 | 0.5 | 0.51 | 0.45 | 0.33 | 0.19 | 0 | 0.25 | 0.59 | 0.9 | 0.62 |
| VS4 | м/с | 0 | 0.74 | 0.98 | 0.95 | 0.76 | 0.53 | 0.28 | 0 | 0.37 | 0.97 | 1.66 | 1.24 |
| VS5 | С-1 | 0 | 0.74 | 0.96 | 0.89 | 0.68 | 0.44 | 0.22 | 0 | 0.3 | 0.84 | 1.56 | 1.23 |
| w1 | С-1 | 7.3 | 7.3 | 7.3 | 7.3 | 7.3 | 7.3 | 7.3 | 7.3 | 7.3 | 7.3 | 7.3 | 7.3 |
| w2 | С-1 | 0 | 0.4 | 0.52 | 0.17 | 1.67 | 2.04 | 2.17 | 0 | 1.0 | 0.92 | 3.46 | 3.8 |
| w3 | С-1 | 0 | 1.88 | 2.59 | 2.63 | 2.29 | 1.71 | 0.95 | 0 | 1.26 | 3.04 | 4.59 | 3.18 |
| w4 | С-1 | 0 | 0.01 | 0.1 | 0.23 | 0.3 | 0.28 | 0.17 | 0 | 0.23 | 0.45 | 0.38 | 0.01 |
Похожие работы
1.2. Построение кинематической схемы Построение кинематической схемы начинаем с разметки неподвижных опор рычажного механизма. Принимаем на чертеже масштабный коэффициент схемы ml = 0.004 м/мм. В принятом масштабе LОА = ОА/ml = 0.11/0.004 = 27.5 мм За нулевое принимаем такое положение механизма, при котором ползун 5 занимает крайнее левое положение (в соответствии с условием). При этом шатун ...
... темп производства, обеспечивать его ритмичность. Являясь основным средством комплексной механизации и автоматизации транспортных и погрузочно-разгрузочных процессов, и поточных технологических операций, конвейеры вместе с тем освобождают рабочих от тяжелых и трудоемких транспортных и погрузочно-разгрузочных работ, делают их труд более производительным. Широкая конвейеризация составляет одну из ...
... для получения высококачественных плит при размоле щепы на дефибраторах применяют размольное оборудование для вторичного размола – рафинаторы.[7] 1.1.3.4 Проклейка древесноволокнистой массы При сухом способе производства древесноволокнистых плит большинство схем технологического процесса предусматривает введение в древесноволокнистую массу термореактивных смол. Это обстоятельство вызывается ...

... . У ленточных машин не используются изложницы холостой ветви и требуется сравнительно частое регулирование и контроль состояния звеньев. 2.3. Модернизация узлов конвейера 2.3.1 Модернизация привода За время работы электролизного производства на литейных конвейерах было предложено и внедрено несколько разных схем привода: 1. Привод состоит из электродвигателя М2МА-6, мощностью N=3кВт, с ...
0 комментариев