Многие задачи радиотехники требуют специфической формы представления сигналов. Для решения этих задач необходимо располагать не только мгновенным значением сигнала, но и знать как он ведет себя во времени, знать его поведение в “прошлом” и “будущем”.
ПРИНЦИП ДИНАМИЧЕСКОГО ПРЕДСТАВЛЕНИЯ.
Данный способ получения моделей сигналов заключается в следующем. Реальный сигнал представляется суммой некоторых элементарных сигналов, возникающих в последовательные моменты времени. Теперь, если мы устремим к нулю длительность отдельных элементарных сигналов, то в пределе получим точное представление исходного сигнала. Такой способ описания сигналов называется динамическим представлением , подчеркивая тем самым развивающийся во времени характер процесса.
Широкое применение нашли два способа динамического представления.
Первый способ в качестве элементарных сигналов использует ступенчатые функции, которые возникают через равные промежутки времени D (рис. 1.1). Высота каждой ступеньки равна приращению сигнала на интервале времени D .
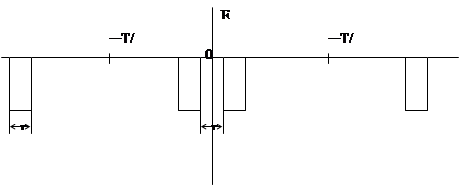
При втором способе элементарными сигналами служат прямоугольные импульсы. Эти импульсы непосредственно примыкают друг к другу и образуют последовательность, вписанную в кривую или описанную вокруг нее (рис. 1.2).
рис 1.1, рис 1.2
Рассмотрим свойства элементарного сигнала, используемого для динамического представления по первому способу.
ФУНКЦИЯ ВКЛЮЧЕНИЯ .
Допустим имеется сигнал, математическая модель которого выражается системой :
Такая функция описывает процесс перехода некоторого физического объекта из “нулевого” в “единичное” состояние. Переход совершается по линейному закону за время 2x . Если параметр x устремить к нулю, то в пределе переход из одного состояния в другое будет происходить мгновенно. Эта математическая модель предельного сигнала получила название функции включения или функции Хевисайда :
В общем случае функция включения может быть смещена относительно начала отсчета времени на величину t0. Запись смещенной функции такова :
ДИНАМИЧЕСКОЕ ПРЕДСТАВЛЕНИЕ ПРОИЗВОЛЬНОГО СИГНАЛА ПОСРЕДСТВОМ ФУНКЦИЙ ВКЛЮЧЕНИЯ.
Рассмотрим некоторый сигнал S(t), причем для определенности скажем, что S(t)=0 при t<0. Пусть {D ,2D ,3D ,...} - последовательность моментов времени и {S1,S2,S3,...} - отвечающая им последовательность значений сигнала. Если S0=S(0) - начальное значение, то текущее значение сигнала при любом t приближенно равно сумме ступенчатых функций :

Если теперь шаг D устремить к нулю. то дискретную переменную kD можно заменить непрерывной переменной t . При этом малые приращения значения сигнала превращаются в дифференциалы ds = (ds/dt ) dt , и мы получаем формулу динамического представления произвольного сигнала посредством функций Хевисайда
Переходя ко второму способу динамического представления сигнала , когда элементами разложения служат короткие импульсы, следует ввести новое важное понятие.
ДИНАМИЧЕСКОЕ ПРЕДСТАВЛЕНИЕ СИГНАЛА ПОСРЕДСТВОМ ДЕЛЬТА-ФУНКЦИЙ.
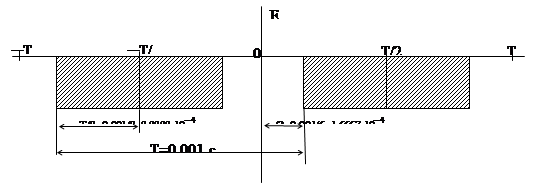
Рассмотрим импульсный сигнал прямоугольной формы, заданный следующим образом :

При любом выборе параметра x площадь этого импульса равна единице :
Например, если u - напряжение, то П = 1 В*с.
Пусть теперь величина Е стремится к нулю. Импульс, сокращаясь по длительности, сохраняет свою площадь, поэтому его высота должна неограниченно возрастать. Предел последовательности таких функций при x ® 0 носит название дельта-функции , или функции Дирака :
![]()
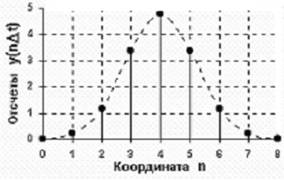
Теперь вернемся к задаче описания аналогового сигнала суммой примыкающих друг к другу прямоугольных импульсов (рис. 2) . Если Sk - значение сигнала на k - ом отсчете, то элементарный импульс с номером k представляется как :
Теперь, если произвести подстановку формулы (6) в (7) предварительно разделив и умножив на величину шага D , то
Переходя к пределу при D ® 0 , необходимо суммирование заменить интегрированием по формальной переменной t , дифференциал которой dt ,будет отвечать величине D . Поскольку
Итак, если непрерывную функцию умножить на дельта-функцию и произведение проинтегрировать по времени, то результат будет равен значению непрерывной функции в той точке, где сосредоточен d - импульс. Принято говорить, что в этом состоит фильтрующее свойство дельта-функции.
Обобщенные функции как математические модели сигналов.
В классической математике полагают, что функция S(t) должна принемать какие-то значения в каждой точке оси t . Однако рассмотренная функция d (t) не вписывается в эти рамки - ее значение при t = 0 не определено вообще, хотя эта функция и имеет единичный интеграл. Возникает необходимость расширить понятие функции как математической модели сигнала. Для этого в математике была введено принципиально новое понятие обобщенной функции.
В основе идеи обобщенной функции лежит простое интуитивное соображение. Когда мы держим в руках какой-нибудь предмет , то стараемся изучить его со всех сторон, как бы получить проекции этого предмета на всевозможные плоскости. Аналогом проекции исследуемой функции ¦ (t) может служить, например, значение интеграла
при известной функции j (t) , которую называют пробной функцией.
Каждой функции j (t) отвечает, в свою очередь, некоторое конкретное числовое значение. Поэтому говорят, что формула (8) задает некоторый функционал на множестве пробных функций j (t). Непосредственно видно, что данный функционал линеен, то есть
![]()
Если этот функционал к тому же еще и непрерывен, то говорят, что на множестве пробных функций j (t) задана обобщенная функция ¦ (t) . Следует сказать, что данную функцию надо понимать формально-аксиоматически, а не как предел соответствующих интегральных сумм.
Обобщенные фнкции , даже не заданные явными выражениями, обладают многими свойствами классических функкций. Так, обобщенные функции можно дифференцировать.
И в заключение следует сказать, что в настоящее время теория обобщенных функций получила широкое развитие и многочисленные применения. На ее основе созданы математические методы изучения процессов, для которых средства классического анализа оказываются недостаточным
Похожие работы
... функций в виде зависимости их значений от определенных аргументов Δвремени, линейной или пространственной координаты и т.п.) при анализе и обработке данных широко используется математическое описание сигналов по аргументам, обратным аргументам динамического представления. Так, например, для времени обратным аргументом является частота. Возможность такого описания определяется тем, что любой ...
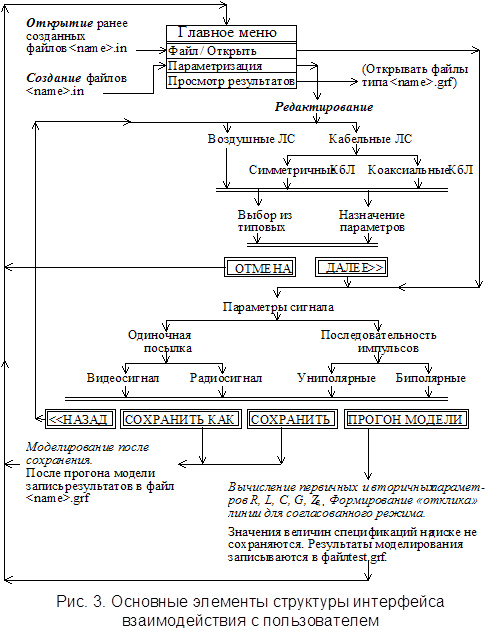
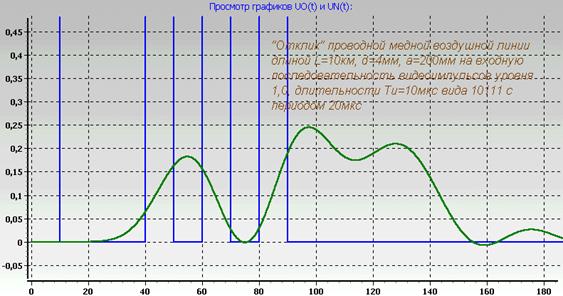
... . Рассчитываются вторичные параметры: – коэффициент распространения: – волновое сопротивление линии Zв. Вычисленные значения параметров доступны для наблюдения пользователю. Проводная линия с распределенными параметрами заменяется цепочечной расчетной эквивалентной схемой, представляющей собой N последовательно соединенных звеньев. Каждое звено рассматривается как пассивный четырехполюсник с ...
... диаграммах совпадают. Определение энергии и средней мощности заданного сигнала на участке цепи с сопротивлением 1 Ом. Определим энергию сигнала по временному представлению. Контрольная работа №2 Расчет прохождения периодических и непериодических сигналов через линейные электрические цепи первого порядка Дано: Шифр периодического сигнала s1 ─ 4 из табл. 3[1]; Рис. 1 ...
0 комментариев