Навигация
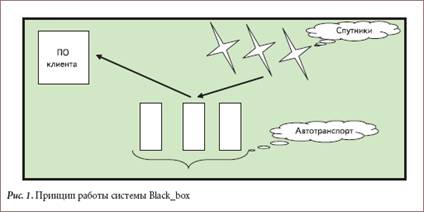
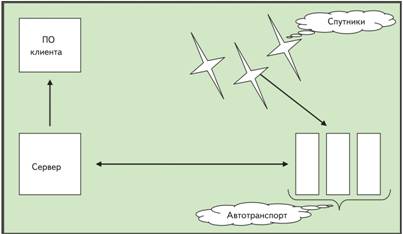
Управление дорожными машинами через "GPS"
23845
знаков
2
таблицы
1
изображение
Курсовая работа
"Управление дорожными машинами через "GPS"
Введение
Высокие темпы автомобилизации после окончания второй мировой войны потребовали коренного перелома в решении дорожных проблем практически во всех странах мира. Рост интенсивности движения автомобилей и плотности транспортных потоков, значительно опережающий темпы дорожного строительства, сделал необходимым принятие энергичных мер по приведению дорожной сети в соответствие с требованиями автомобильных перевозок.
Развитие дорожной сети, обеспечение возрастающего объема строительства новых и содержания действующих транспортных магистралей связано в реальной экономике с обновлением и поддержанием в работоспособном состоянии дорожно-строительных машин.
Поэтому новые методы при проектировании дорожных машин широко используются, изобретаются новые узлы и агрегаты машин, проводятся вычисления множества задач, чтобы обеспечить более долгий срок работы механизмов машинных, множества заводов и предприятий.
В составе машинных парков дорожно-строительных и ремонтно-эксплуатационных предприятий чаще всего можно встретить бульдозеры, скреперы, экскаваторы, катки, планировочно-уплотняющие машины, компрессоры, трубоукладчики. В производстве земляных работ: устройстве и содержании дорог перечисленным дорожно-строительным машинам вряд ли могут конкурировать по производительности другие средства механизации, поэтому они работают на сосредоточенных и линейно-протяжных объектах всех отраслей народного хозяйства.
Объем выпуска дорожно-строительных машин сократится не намного и в ближайшее время ожидается увеличение их серийности наряду с совершенствованием конструкции, улучшением условий работы машиниста, повышением удобства технического обслуживания и ремонтопригодности. На развитие исполнений дорожно-строительных машин оказывают влияние технический уровень и качество применяемых для их сборки базовых тракторов, дизельных двигателей, силовых передач, систем и аппаратуры управления.
Обращают на себя внимание заметные изменения в технологии производства строительно-монтажных работ, выполняемых дорожно-строительными машинами. Повысились темпы возведения и реконструкции объектов, появились новые методы выполнения работ и технологических операций, более конкретными стали задания на подлежащие выполнению машинами объемы работ на строительной площадке, усилилась ответственность и изменились формы оплаты труда рабочих.
Применение современных образцов дорожно-строительных машин обеспечивает выполнение требований интенсивной технологии механизированного производства работ, рост производительности и улучшение условий труда рабочих, но достигается это за счет совершенствования и усложнения конструкций машин, что, в свою очередь, требует высокой квалификации машиниста, одновременно возрастает значение профессиональной инициативы, самостоятельности и ответственности машиниста и его руководителя (менеджера).
Наибольшее распространение при производстве общестроительных земляных работ имеют дорожно-строительные машины мощностью до 150 кВт.
Чтобы в полной мере реализовать технические возможности механизмов и машин применяют общие принципы и особенности конструирования универсальных, специальных промышленных роботов и роботов агрегатно-модульного типа.
Конструкция промышленного робота определяется большим числом факторов, зависящих от его назначения и условий применения.
В современной робототехнике развивается два основных направления конструирования роботов. Первое из них связано с разработкой специализированных роботов, предназначенных для оснащения технологического оборудования определенной группы и выполняющих технологические операции одного вида, и специальных, предназначенных для оснащения технологического оборудования конкретной модели и выполняющих определенные технологические операции. Такие роботы имеют небольшое число степеней подвижности, высокие показатели быстродействия, точности и надежности. Однако возможности их применения при изменении параметров технологического процесса ограничены.
Второе направление состоит в разработке многофункциональных, универсальных промышленных роботов, которые могут применяться в широком диапазоне изменения параметров технологического процесса и в различных процессах. Эти роботы обладают большим числом степеней подвижности, но обеспечить в них высокую точность и надежность значительно труднее, а также они требуют больших затрат при изготовлении. Кроме того, часто на конкретных операциях используются для движения не все степени подвижности.
Эти противоречия могут быть разрешены, если применить агрегатно-модульный принцип построения роботов – конструирование из типовых узлов и модулей. Роботы этого типа не обладают избыточностью на конкретных операциях и в то же время универсальны. Недостатки агрегатно-модульных роботов по сравнению с универсальными при большом числе степеней подвижности – увеличение массы и снижение жесткости.
Похожие работы
... , основанный на управлении качеством, уже имеют преимущества перед конкурентами в борьбе за потребителя и более других чувствуют уверенность в завтрашнем дне. Глава 2. Анализ системы управления качеством на предприятии ООО «ЧелябТрансАвто-3» 2.1. Общая характеристика предприятия Общество с ограниченной ответственностью «ЧелябТрансАвто-3» создано 22 октября 2002 г. (прил. 1) в ...

... 540x420x210 мм и имеет вес 13 кг; Ø Антенно-фидерная система скомпонована в радиопрозрачном колпаке диаметром 295 мм, высотой — 140 мм, весом 3 кг.[1] 4. Предложение системы защиты от слежения за автомобилем Итак, имеется автомобиль УАЗ - 462, перевозящий ценный груз, на котором скрыто установлена система, включающая GPS – приемник и GSM – передатчик и определяющая координаты данного ...

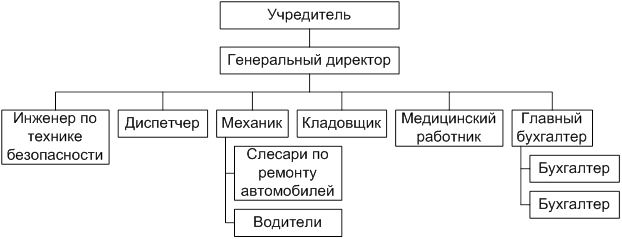
... оборудования. Механик следит за тем, чтобы в каждой машине были огнетушитель и аптечка, исправный ремень безопасности, и за технической исправностью транспортного средства. 2. Анализ коммерческой деятельности предприятия Пассажирские перевозки – распространенное явление в городской жизни, и Тольятти не стал исключением. Важный вид транспорта, обеспечивающий сегодня пассажирские перевозки – ...
... из бака с целью последующей его продажи: спутниковая система мониторинга записывает все сливы топлива с указанием их времени, даты, продолжительности и объёма. Для оперативных служб система GPS мониторинга транспорта является незаменимым источником информации в режиме реального времени, помогая в принятии ответственных решений. Система мониторинга автотранспорта используется для Скорой помощи, ...
0 комментариев