Навигация
Способы обработки многочастотных сигналов
29399
знаков
0
таблиц
9
изображений
3. Способы обработки многочастотных сигналов
Как уже говорилось, оптимальное приемное устройство многочастотной РЛС состоит из совокупности параллельных частотных каналов, общего сумматора и порогового устройства. Суммирование выходных сигналов частотных каналов принципиально может быть осуществлено на высокой, промежуточной или низкой (видео) частоте.
Первые два способа объединения частотных каналов, но их реализация представляет довольно сложную проблему. Способ объединения частотных каналов на видеочастоте, несколько уступая двум другим способам в пороговом отношении сигнал/шум, обладает по сравнению с ними такими важными преимуществами, как отсутствие необходимости обеспечения когерентности радиолокационной системы и независимость характеристик приемного устройства от величины доплеровских сдвигов частот принимаемых сигналов.
В зависимости от числа рабочих частот РЛС принципиально возможны несколько способов объединения сигналов частотных каналов приемного устройства: линейное суммирование амплитуд сигналов всех каналов перемножение амплитуд сигналов всех каналов; линейное суммирование амплитуд сигналов нескольких каналов в отдельных сумматорах с последующим перемножением результатов суммирования; перемножение амплитуд сигналов нескольких каналов в отдельных умножителях с последующим суммированием результатов перемножения [2].
Первые два способа применимы при любом числе рабочих частот РЛС, тогда как последние два способа могут использоваться только при числе частот не менее трех. Наиболее распространенным способом сложения частотных составляющих многочастотного сигнала является линейное суммирование их амплитуд, обеспечивающее наибольшую вероятность обнаружения цели:

где Uc - амплитуда результирующего сигнала на выходе сумматора; Ur амплитуда сигнала в r-ом канале; L - число рабочих частот.
Для принятия решения о наличии цели при этом способе сложения сигналов достаточно превышения порога сигналом хотя бы одного из частотных каналов приемника.
Если приемное устройство состоит из L частотных каналов, то вероятность одновременного превышения порога n каналов равна
где DLn - вероятность одновременного превышения порога сигналами n из L каналов; D0 - вероятность обнаружения цели отдельным каналом; (1-D0) - вероятность пропуска цели отдельным каналом; количество возможных комбинаций каналов, сигналы которых одновременно превышают порог

Поскольку при линейном суммировании сигналов частотных каналов необходимым и достаточным условием правильного обнаружения цели является превышение порога сигналом хотя бы одного из каналов, то полная вероятность обнаружения цели многочастотной РЛС будет равна сумме вероятностей превышения порога сигналами одного, двух, трех и т. д. и, наконец, всех каналов приемника
![]()
С помощью аналогичных рассуждений можно найти зависимость полной ложной тревоги в многоканальном приемнике от вероятности ложной тревоги в отдельном канале при линейном суммировании сигналов
или, учитывая, что F0<<1:
F0 @ LF0 .
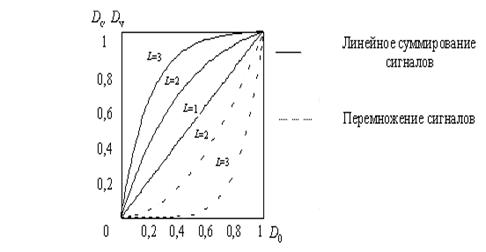
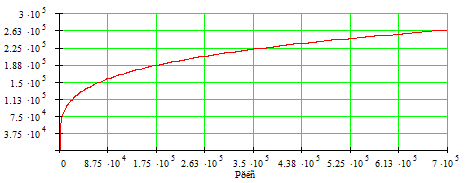
На рис. 11 графически изображена зависимость вероятности обнаружения цели в многоканальном приемнике с линейным суммированием сигналов от вероятности обнаружения цели в отдельном канале при различном числе каналов. Из сравнения графиков зависимости Dc=f(D0) при различных значениях L можно заключить, что вероятность обнаружения цели при линейном суммировании сигналов тем выше, чем больше число частотных каналов приемника. Однако не следует забывать, что увеличение числа каналов связано с повышением также и ложной тревоги. Чтобы сохранить вероятность ложной тревоги в многоканальном приемнике такой же, как в отдельном канале, необходимо увеличить порог, что, естественно, приведет к снижению вероятности обнаружения цели.
При объединении сигналов частотных каналов приемника путем перемножения их амплитуд результирующий сигнал на выходе общего умножителя имеет вид
![]()
где U1, U2,…, UL - амплитуды сигналов в соответствующих каналах приемника.
Необходимым условием правильного обнаружения цели в многоканальном приемнике с перемножением сигналов является превышение порога сигналами всех каналов. Очевидно, при этом вероятность обнаружения будет определятся формулой
![]()
![]() а вероятность ложной тревоги
а вероятность ложной тревоги
Таким образом, в многоканальном приемнике с перемножением сигналов вероятность обнаружения цели так же, как и вероятность ложной тревоги, тем выше, чем меньше число каналов приемника (рис. 11).
Способы объединения сигналов суммированием с последующим перемножением сумм и перемножением с последующим суммированием произведений представляют собой комбинации рассмотренных способов обработки многочастотного сигнала - линейного суммирования и перемножения сигналов.
Похожие работы

... то Видно, что выполнение РЛС своих задач, в условиях применения комплекса помех, почти невозможно. Не стоит забывать, что устройства постановки помех, так же как и устройства борьбы с ними, динамично развиваются. Чаще всего средства нападения оказываются «сильнее», а адекватные меры противодействия появляются лишь через некоторое время, поэтому оценить эффективность средств помехозашиты и ...



... коррелированной помехе ôr/ô2è1, Кп è, подавление помехи максимально. Рисунок 22. Структурная схема квадратурного компенсатора. Анализ эффективности применения комплекса помех и средств помехозащиты Следует, заметить, что никакое устройство для подавления помех не является универсальным. Каждое устройство защиты позволяет эффективно бороться только с каким-то одним ...
... систем и групповых действий; · разработкой эффективных средств защиты; использованием своих средств РЭБ в интересах помехозащиты. Что же касается помехопостановки, то здесь требуется разработка новых алгоритмов и более быстродействующих вычислительных устройств. Так же хорошо бы разработать алгоритмы, позволяющие отслеживать изменение ситуации в реальном времени. Таким образом, на устройства ...



... снежный покров - свыше 30 см. Полоса частот полезного сигнала определяется минимальной и максимальной шириной зоны чувствительности, а также минимальной и максимальной скоростью передвижения нарушителя. Соответственно для конкретного средства обнаружения при уменьшении длины участка блокирования возможно обнаружение более медленно движущегося нарушителя. Для обеспечения совместной работы ...
0 комментариев