Навигация
Многочастотная радиолокация целей
29399
знаков
0
таблиц
9
изображений
2. Многочастотная радиолокация целей
Отрицательное влияние флюктуации отраженных сигналов на характеристики РЛС может быть устранено или, по крайней мере, уменьшено, если удастся каким-либо образом добиться их сглаживания. Одним из способов сглаживания флюктуации является применение многочастотных сигналов. Физическая сущность эффекта сглаживания флюктуации отраженного сигнала при облучении цели многочастотным сигналом состоит в том, что при достаточно большом разносе несущих частот ширина лепестков диаграмм вторичного излучения цели на различных частотах неодинакова, а соответствующие экстремальные точки диаграмм оказываются сдвинутыми друг относительно друга, благодаря чему уменьшается изрезанность эквивалентной диаграммы вторичного излучения цели и соответственно относительная величина флюктуации отраженного сигнала. При этом наибольший эффект сглаживания флюктуации достигается при статистической независимости отраженных от цели сигналов на каждой из составляющих частот [3].
При многочастотном сигнале уже недостаточно рассматривать функции автокорреляции каждой из его частотных составляющих, а необходимо ввести также функцию их взаимной корреляции

Необходимым (но не достаточным) условием независимости отраженных сигналов является ортогональность соответствующих составляющих зондирующего сигнала [4]. Из ( 2) видно, что эта ортогональность не может быть обеспечена подбором законов модуляции, так как преобразование Фурье функции Сjk(t,wj-wk+Wjk) является произведением спектров модуляции j-го и k-го сигналов, один из которых сдвинут по частоте на величину wj-wk+Wjk, так что требуемое равенство нулю этой функции при j¹k достигается лишь при неперекрывании указанных спектров, т. е. При достаточно большой величине ½wj-wk ½.
Функцию корреляции при многочастотном излучении можно преобразовать к виду

где r(t1-t2) – коэффициент флюктуаций; wдj – доплеровский сдвиг j-й несущей частоты; Аj – амплитуда j-го отраженного сигнала; rjk - оределяет степень коррелированности j–го и k–го сигналов.
Известно, что частота корреляции сигналов, отраженных от одной и той же цели, зависит от скорости распространения электромагнитной энергии и радиальной протяженности цели. При этом под радиальной протяженностью цели понимается: для точечных целей — разрешающая способность РЛС по дальности, а для протяженных целей — непосредственно радиальные размеры их. Радиолокационные сигналы цели могут считаться некоррелированными, если разность фаз составляющих многочастотного сигнала, отраженных от крайних точек цели, измеренная относительно ее центра, составляет не менее 2p:
![]()
где Djj=2plцрfj/с - сдвиг фазы сигнала на частоте fj многочастотного сигнала относительно фазы сигнала от отражающего центра цели; lцр — радиальная протяженность цели. Подставив значение Djj и Djj-1, в выражение ( 3), найдем величину необходимого разноса частот
Таким образом, необходимым условием независимости отраженных от одной и той же цели сигналов является обеспечение необходимого разноса их частот, величина которого зависит от радиальной протяженности цели.
Более строго условие независимости отраженных сигналов формулируется следующим образом: отраженные сигналы являются статистически независимыми, если длина волны, соответствующая разностной частоте, мала по сравнению с радиальной протяженностью цели и если отсутствует взаимное перекрывание спектров модуляции сигналов различных частот.
Для статистически независимых сигналов логарифм отношения правдоподобия равен сумме логарифмов отношении правдоподобия для отдельных сигналов. В соответствии с этим схема оптимальной обработки многочастотного сигнала представляет собой совокупность схем для отдельных сигналов. Напряжения на выходах этих схем суммируются и сравниваются с поротом.
Можно показать [4], что для случая медленных флюктуаций и обработки сигнала оптимальным образом, характеристическая функция определяется равенством
где т — число используемых частот.
При q0j=0 этой характеристической функции соответствует хи-квадрат распределение с 2т степенями свободы. Наибольший интерес представляет вопрос о выборе числа частотных каналов, обеспечивающего максимальную дальность обнаружения при заданной общей мощности излучения. Считая, что мощность распределяется между каналами поровну (q01=q02=…=q0/m) уравнение характеристик обнаружения можно представить в виде
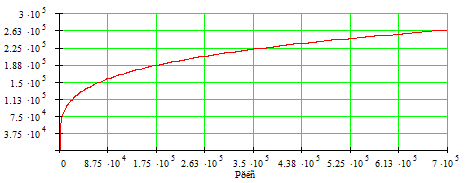
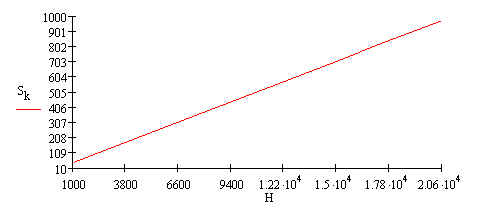
График зависимости q0(m) приведен на рис. 8. Эта зависимость порогового отношения сигнал/шум от числа статистически независимых компонент сигнала, квадратично суммируемых в процессе обработки.
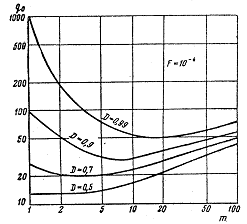
Рис. 8. Зависимость порогового отношения сигнал шум от числа используемых несущих частот
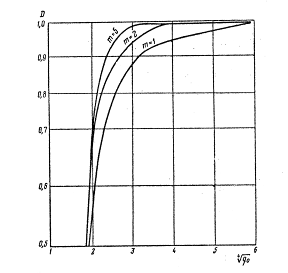
Рис. 9. Зависимость вероятности правильного обнаружения от дальности
Как видно из рисунка, кривые q0(m) при D>0,5 имеют минимум при m=mопт(D), глубина которого увеличивается с увеличением вероятности правильного обнаружения. Соответственно увеличивается и выигрыш в пороговом отношении сигнал/шум (а следовательно, и в дальности обнаружения) при фиксированном числе частотных каналов по сравнению со случаем одночастотной работы. Вследствие этого при многочастотной работе при m<mопт вероятность обнаружения быстрее увеличивается с уменьшением дальности (рис. 9).
Интересно отметить, что кривая зависимости q0(m) весьма быстро спадает при малых т. Благодаря этому выигрыш, близкий к максимальному, можно получить при сравнительно небольшом числе рабочих частот (2 – 4).
При быстрых флюктуациях отраженного от цели сигнала, равномерном распределении мощности между частотными каналами и одинаковых спектрах флюктуаций на различных частотах увеличение числа каналов эквивалентно увеличению в т раз времени наблюдения при одновременном уменьшении отношения сигнал/шум. В частности, для прямоугольной спектральной плотности флюктуаций [4], можно получить
Последнее равенство справедливо при mDfcT >> 1. Из ( 5) видно, что при быстрых флюктуациях отраженного сигнала пороговое отношение сигнал/шум увеличивается с увеличением числа частотных каналов примерно как Öт. Качественно это объясняется тем, что в этом случае уже имеется достаточное число (порядка DfcT) статистически независимых компонент сигнала и дальнейшее дробление мощности между этими компонентами снижает эффективность когерентного накопления сигнала.
Таким образом, при быстрых флюктуациях отраженного сигнала (mDfcT >> 1) использование многочастотной работы с точки зрения требования увеличения дальности действия радиолокатора является нецелесообразным.
радиолокация многочастотный сигнал

Рис. 10. Зависимость вероятности обнаружения цели от отношения сигнал шум
Сглаживание флюктуаций отраженных сигналов при многочастотном зондирующем сигнале позволяет приблизить характеристики обнаружения флюктуирующих целей к характеристикам обнаружения идеальной нефлюктуирующей цели. На рис. 10 изображены зависимости вероятности обнаружения цели от отношения сигнал/шум для двух типов целей — идеальной нефлюктуирующей (кривая 1) и флюктуирующей при одночастотном (кривая 2) и многочастотном (кривая 3) облучениях. Всем трем случаям соответствует равная вероятность ложной тревоги (F = 2·10-5) и одинаковое число импульсов, принимаемых за один цикл обзора (N = 20).
Сравнивая кривые 1 и 3, можно заключить, что при многочастотной работе РЛС вероятность обнаружения флюктуирующих целей практически не отличается от вероятности обнаружения нефлюктуирующих целей (максимальные отклонения имеются при очень больших и очень малых вероятностях обнаружения цели и при этом не превышают 1,5 – 2 дБ).
Из сопоставления кривых 2 и 3 видно, что преимущества многочастотной работы реализуются в области больших вероятностей обнаружения целей (более 0,3). Так, например, в случае многочастотной работы РЛС при отношении сигнал/шум, равном 5 дБ, обеспечивается практически 100 % вероятность обнаружения флюктуирующих целей, тогда как при этих же условиях вероятность обнаружения целей обычной одночастотной РЛС составляет менее 70 %. При заданной вероятности обнаружения целей многочастотная РЛС способна обеспечить намного большую дальность действия, чем соответствующая ей одночастотная РЛС при той же мощности излучения.
Выигрыш в отношении сигнал/шум, равный 7,5 дБ [2], равнозначен увеличению мощности РЛС примерно в шесть раз, в результате чего дальность действия ее будет в 1,5 раза превосходить дальность действия соответствующей одночастотной РЛС.
В области малых вероятностей обнаружения целей многочастотная работа РЛС не имеет преимуществ, так как случайное появление в пачке отраженных сигналов отдельных импульсов, превышающих порог, более вероятно при одночастотном облучении флюктуирующей цели.
Похожие работы

... то Видно, что выполнение РЛС своих задач, в условиях применения комплекса помех, почти невозможно. Не стоит забывать, что устройства постановки помех, так же как и устройства борьбы с ними, динамично развиваются. Чаще всего средства нападения оказываются «сильнее», а адекватные меры противодействия появляются лишь через некоторое время, поэтому оценить эффективность средств помехозашиты и ...



... коррелированной помехе ôr/ô2è1, Кп è, подавление помехи максимально. Рисунок 22. Структурная схема квадратурного компенсатора. Анализ эффективности применения комплекса помех и средств помехозащиты Следует, заметить, что никакое устройство для подавления помех не является универсальным. Каждое устройство защиты позволяет эффективно бороться только с каким-то одним ...
... систем и групповых действий; · разработкой эффективных средств защиты; использованием своих средств РЭБ в интересах помехозащиты. Что же касается помехопостановки, то здесь требуется разработка новых алгоритмов и более быстродействующих вычислительных устройств. Так же хорошо бы разработать алгоритмы, позволяющие отслеживать изменение ситуации в реальном времени. Таким образом, на устройства ...



... снежный покров - свыше 30 см. Полоса частот полезного сигнала определяется минимальной и максимальной шириной зоны чувствительности, а также минимальной и максимальной скоростью передвижения нарушителя. Соответственно для конкретного средства обнаружения при уменьшении длины участка блокирования возможно обнаружение более медленно движущегося нарушителя. Для обеспечения совместной работы ...
0 комментариев