Июля 1963г. была получена первая партия Казанского фенола и ацетона
Описание технологического процесса
Загрузчик ЗГВ - 500
Тянущее устройство
Датчики тока и скорости
УПРАВЛЯЕМЫЙ ВЫПРЯМИТЕЛЬ
Выбор тиристоров
Регулировочная характеристика преобразователя
Система импульсно-фазного управления (СИФУ) с входным устройством
СИНТЕЗ ЗАМКНУТОЙ СИСТЕМЫ ЭЛЕКТРОПРИВОДА ЭКСТРУДЕРА
Оптимизация контура регулирования тока
Оптимизация контура регулирования скорости
Расчет статической характеристики
Расчет переходного процесса
РАСЧЕТ НЕУПРАВЛЯЕМОГО ВЫПРЯМИТЕЛЯ ДЛЯ ПИТАНИЯ ОБМОТКИ ВОЗБУЖДЕНИЯ
Расчет и выбор диодов
БЕЗОПАСНОСТЬ И ЭКОЛОГИЧНОСТЬ ПРОЕКТА
Определение категории помещения
Шум и вибрация
Вентиляция, отопление
Расчет искусственного освещения
Расчёт заземлителей
Технологическая безопасность
Расчет основных фондов, капитальных затрат на оборудование и амортизационных отчислений
Дополнительный фонд заработной платы (10% от основного ФЗП)
Расчет расходов на содержание и эксплуатацию оборудования
Электроэнергия на технологические цели
Расчет экономической эффективности
Навигация
Тянущее устройство
Разработка электроприводов прессовых машин
117101
знак
28
таблиц
3
изображения
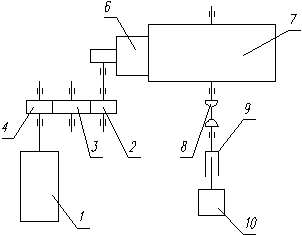
2.3.9 Тянущее устройство
Для протягивания трубы через систему калибраторов необходимо создать тяговое усилие и обеспечить регулируемую скорость движения грубы. Эту задачу выполняет гусеничное тянущее устройство. Рабочим органом этой установки являются две или несколько гусениц, которые синхронно вращаются, заключив между собой трубу. Двухгусеничные тянущие устройства используются преимущественно для протягивания труб от малого до среднего диаметра (от 20 до 250 мм). Многогусеничньте устройства необходимы для работы с тонкостенными трубами или трубами больших диаметров. Прижим гусениц к профилю осуществляется пневмоцилиндрамис регулировкой усилия прижима. Скорость тянущего устройства регулируется бесступенчато. Нижняя гусеница имеет привод регулировки по высоте, чтобы подстраиваться под определенный диапазон диаметров трубы. Для предотвращения боковых или вертикальных перемещений тянущее устройство имеет опорные валики, которые регулируются в зависимости от размеров трубы.
Чтобы избежать опасных усилий в передаточных парах кинематики, каждая из гусениц оснащена дифференциальной муфтой, которая также обеспечивает равномерное и синхронное движение всех гусениц.
Количество гусениц - 2 шт.
Мощность привода - 4,2 кВт.
2.3.10 Длиномер
Длинномер представляет собой колесо, входящее в контакт с трубой. При повороте колеса на один оборот труба проходит 0,5 м. К колесу прикреплен флажок, который, проходя за каждый оборот через паз бесконтактного переключателя, выдает импульс на реле счетчика импульсов.
2.3.11 Машина намоточная
Предназначена для намотки труб в бухты с наружным диаметром не более 2000 мм и шириной не более 400 мм.
Скорость наматывания - не более 25 м/мин.
Мощность привода - 1,7 кВт.
Состоит из двух бухтовых головок, вращаемых электродвигателем постоянного тока, через клиноременную передачу. Момент передается на редуктор связанный цепной передачей с валом привода.
На валу привода смонтированы две свободно вращающиеся звездочки, которые связаны с валом через электромагнитные муфты. При включении соответствующей электромагнитной муфты приводится во вращение соответствующая бухтовая головка.
3. Система управления электроприводом и требования ней
Комплект управления привода червячного пресса линии для производства труб на базе ТПЧ-320/460 укомплектован релейно-контакторной, пускорегулирующей и сигнализирующей аппаратурой, приборами контроля и измерения нагрузки частоты вращения.
Комплект содержит полный состав электрооборудования для контроля и управления приводом червячного пресса с электродвигателями постоянного тока на напряжение U=440В и на токи I= 250/320А.
Схемой предусмотрено управление приводом постоянного тока, приводом вентилятора охлаждения электродвигателя постоянного тока, а так же технологические блокировки линий и перегрева пресса.
Комплект управления является законченным изделием и устанавливается у механизма (пульт управления) или в другом месте [3]. Нормальная работа системы управления обеспечивается в закрытых условиях при соблюдении следующих условий:
а) высота над уровнем моря – до 1000м;
б) температура окружающей среды – 1/+40 С;
в) относительная влажность воздуха – не более 80%;
г) окружающая среда невзрывоопасна, не содержащая пыли, агрессивных паров и газов в концентрациях, разрушающих металлы и изоляцию.
Регулируемый электропривод выполнен по системе тиристорный преобразователь – двигатель (ТП-Д). Регулирование скорости двигателя производится изменением напряжения на якоре двигателя при постоянном токе возбуждения [4].
Для автоматического поддержания постоянства скорости привода применена жесткая обратная связь по скорости. В качестве датчика скорости используется тахогенератор типа ТС-1, напряжение пропорциональное скорости двигателя включено встречно с задающим напряжением , снимаемым с датчика скорости.
Результирующий сигнал поступает на вход промежуточного усилителя тиристорного агрегата. Система автоматического регулирования обеспечивает поддержание скорости с точностью +/-2% при изменении момента нагрузки на валу двигателя от 0,5Мн до 1Мн и изменении напряжения сети в пределах (0,95+1,1) UH в диапазоне регулирования скорости 1:10.
4 Расчёт мощности и выбор электродвигателя
4.1 Выбор электродвигателя
При рассмотрении работы двигателя, приводящего в действие производственный механизм, необходимо выявить соответствие механических свойств электродвигателя характеристике производственного механизма.
Экструдер должен иметь жесткую механическую характеристику. Такой механической характеристикой обладают двигатели постоянного тока с независимым возбуждением (ДПТ НВ) и асинхронные двигатели (в пределах рабочего участка механической характеристики). Наиболее широкое применение в промышленности при разработке регулируемых ЭП нашли ДПТ НВ. Это обусловлено их высокими регулировочными и пусковыми характеристиками, а также хорошими показателями качества переходных процессов.
Правильный выбор двигателя имеет большое значение, поскольку оказывает определяющее влияние на первоначальные затраты, стоимость эксплуатационных расходов, обеспечение всех технологических режимов работы и необходимых динамических и статических характеристик. Мощность электродвигателя выбирается, исходя из необходимости обеспечения заданной работы ЭП при соблюдении нормального теплового режима и допустимой механической перегрузки двигателя.
Расчет мощности электродвигателя для привода червячного пресса будем вести исходя из следующих данных [5]:
-рабочий момент на шнеке экструдера: ![]() н. м;
н. м;
-передаточное число редуктора: i – 16 (редуктор типа Ц2У-355 Н-16-13);
-КПД редуктора: ![]() ;
;
-частота вращения шнека регулируемая: w![]() ; w
; w![]() ;
;
или: n![]() об/мин; n
об/мин; n![]() об/мин.
об/мин.
Приведем момент шнека к моменту на валу двигателя, через передаточное число редуктора и его КПД по формуле:
![]() ;
;
![]() (нм)
(нм)
Зная момент на валу электродвигателя можно найти расчетную мощность двигателя:
![]()
где ![]() - коэффициент запаса по мощности, учитывающий динамические режимы работы электродвигателя, когда он работает с повышенными моментами;
- коэффициент запаса по мощности, учитывающий динамические режимы работы электродвигателя, когда он работает с повышенными моментами;
![]() ;
;
![]()
![]() (Вт)
(Вт)
Переведем угловую скорость вращения вала из рад/с в об/мин:
![]() ;
;
![]() (об/мин);
(об/мин);
Целью данного расчета является замена физически и морально устаревшего электродвигателя постоянного тока серии 2П. Исходя из полученных данных, т.е. мощности двигателя ![]() Вт и номинальной частоты вращения (
Вт и номинальной частоты вращения (![]() об/мин). Выбираем электродвигатель из наиболее совершенной серии 6П.
об/мин). Выбираем электродвигатель из наиболее совершенной серии 6П.
Из справочника наиболее подходящим для данных условий является двигатель 6ПФ250МГУХЛ4. Его основные данные приведены ниже:
Тип двигателя: 6ПФ250МГУХЛ4
![]() КВТ
КВТ
![]() В
В
![]() об/мин
об/мин
![]() об/мин
об/мин
КПД=89,0 %
![]() А
А
![]() кг-
кг-![]()
![]() Ом
Ом
![]() Ом
Ом
![]() Ом
Ом
По сравнению с предшествующими сериями у машин серии 6П повышена перегрузочная способность, расширен диапазон регулирования частоты вращения, улучшены динамические свойства, уменьшены шум и вибрация, повышена мощность на единицу массы, увеличена надежность и ресурс работы.
Питание ДПТ может осуществляться от источника постоянного тока или от тиристорного преобразователя. При питании от ТП допустимый ток якоря уменьшается в зависимости от схемы выпрямления и электромагнитной постоянной времени якорной цепи. Устойчивая работа ДПТ обеспечивается схемой управления электропривода.
Определим конструкционный коэффициент двигателя.
![]() , (4.9)
, (4.9)
где ![]() -номинальное напряжение питания электродвигателем
-номинальное напряжение питания электродвигателем
![]() -номинальный потребляемый ток электродвигателя
-номинальный потребляемый ток электродвигателя
![]() -суммарное сопротивление цепи якоря электродвигателя
-суммарное сопротивление цепи якоря электродвигателя
![]() -верхняя скорость вращения вала электродвигателя в номинальном режиме
-верхняя скорость вращения вала электродвигателя в номинальном режиме
![]()
![]() (4.10)
(4.10)
где ![]() -сопротивление якоря, 0,068 (Ом)
-сопротивление якоря, 0,068 (Ом)
![]() -сопротивление добавочных полюсов, 0, 0098 (Ом)
-сопротивление добавочных полюсов, 0, 0098 (Ом)
![]() (Ом) (4.11)
(Ом) (4.11)
Номинальный ток якоря:
![]() ; (4.12)
; (4.12)
где ![]() -номинальное напряжение питания электродвигателем
-номинальное напряжение питания электродвигателем
![]() -электрическая мощность двигателя, потребляемая из сети:
-электрическая мощность двигателя, потребляемая из сети:
![]() , (4.13)
, (4.13)
![]() -КПД электродвигателя 89%,
-КПД электродвигателя 89%,
![]() кВт, (4.14)
кВт, (4.14)
тогда ![]() А, (4.15)
А, (4.15)
тогда ![]() (4.16)
(4.16)
4.2 Электродвигатели постоянного тока серии 6ПФ
Предназначены для регулируемых электроприводов главного движения металлорежущих станков с ЧПУ, гибких производственных систем и другого автоматизированного оборудования.
Структура условного обозначения машины постоянного тока 6ПФ250МГУХЛ4:
6 - порядковый номер серии;
П - электродвигатель постоянного тока;
Ф - защищенное исполнение с независимой вентиляцией;
250 - высота оси вращения, мм;
М - условная длина сердечника якоря (М - вторая длина);
Г - наличие встроенного тахогенератора;
УХЛ - климатическое исполнение двигателя;
4 - категория размещения (4 - в закрытом помещении с отоплением и вентиляцией).
Широкорегулируемые повышенной точности с пристроенным тахогенератором постоянного тока и датчиком тепловой защиты, с независимой вентиляцией от пристроенного электровентилятора типа "наездник", степень защиты IР238 по ГОСТ 17494-87, способ охлаждения IС06 по ГОСТ 20459-87.
Расположение вентилятора на торцевой поверхности электродвигателя со стороны коллектора, или на боковой поверхности, сверху. Возможна установка фильтра вентилятора для защиты от попадания пыли вовнутрь. Применена изоляция класса нагревостойкости F по ГОСТ 8865-87.
Группа механического исполнения по ГОСТ 17516.1-90. Конструктивное исполнение по способу монтажа IМ2101 по ГОСТ 2479-79 - горизонтальное, вертикальное валом вверх или валом вниз, крепление за лапы, за фланец.
Режим работы продолжительный S1, допускается работа в режимах S2-S8 по ГОСТ 183-74.
Средний уровень звука при номинальной частоте вращения до 900 мин"1 соответствует классу 1, при номинальной частоте вращения 900 мин" и выше, соответствует классу 2.
Двигатели допускают регулирование частоты вращения напряжением якоря в диапазоне от 0 до 460 В при постоянном моменте, при этом допускается стоянка с моментом, равным половине номинального.
Двигатели допускают регулирование частоты вращения до максимальной ослаблением поля при номинальном напряжении на якоре в диапазоне не менее 1:3 при постоянной мощности.
Условия эксплуатации:
-высота над уровнем моря не более 1000 м;
-температура окружающей среды от 1 до 40°С;
-относительная влажность воздуха до 98% при 1=35°С:
-окружающая среда невзрывоопасная, не содержащая металлической или другой токопроводящей пыли, агрессивных газов и паров в концентрациях разрушающих металлы и изоляцию;
-надежность и долговечность;
-вероятность безотказной работы за наработку 10 000ч не менее 0,95;
-средний ресурс до списания 30 000ч;
-средний срок службы 1 5 лет.
Похожие работы
... быть как можно проще и надежнее. В связи с этим привода кузнечно-прессовых машин запитываются от стандартной промышленной сети на 380 В, 3 фазы, частота 50 Гц. В прессе не требуется сложная система управления электроприводом пресса, достаточно включать и выключать его, так как управление прессом производится за счет управления кинематическими цепями пресса. 3. Выбор принципиальных решений ...

... , если же выполнено любое из условий 1, 3, 4, то будут выполнены и другие из этих условий (хотя ВНД проекта может и не существовать). Глава 2. Анализ возможности расширения производства на примере ООО «Санфлор» 2.1 Общая характеристика предприятия Общество с ограниченной ответственностью «Санфлор» действует в соответствии с законодательством РФ, Уставом и внутренними документами общества. ...
... ) при запуске в серийное производство контейнеров с оборудованием. Все это ведет к снижению сроков и затрат на подготовку производства. 5Автоматизированное проектирование деталей крыла В настоящем разделе проекта рассматривается автоматизированное проектирование деталей и узлов с целью увязки конструкции и подготовки информации для изготовления шаблонов, технологической оснастки и самих деталей. ...
... осуществлять трудовую деятельность более эффективно, творчески, а также способствует выходу личности на новые уровни своего развития. 1.2 Педагогические подходы к реализации программы профессиональной подготовки заливщиков металла Учебные занятия, как правило, проводятся в виде лекций, консультаций, семинаров, практических занятий, лабораторных работ, контрольных и самостоятельных работ, ...
0 комментариев