Навигация
Синтез астатических систем
12484
знака
6
таблиц
39
изображений
Федеральное агентство по образованию РФ
ГОУ ВПО
"Московский Государственный Текстильный Университет им. А.Н. Косыгина"
ФИТАЭ
Кафедра автоматики и промышленной электроники
Курсовая работа
Тема: "Синтез астатических систем"
Дисциплина: "Теория Автоматического Управления"
Москва 2009
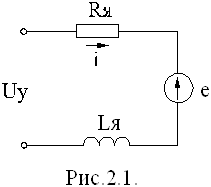
Исходные данные:
ПИ-закон
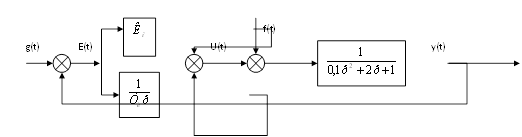
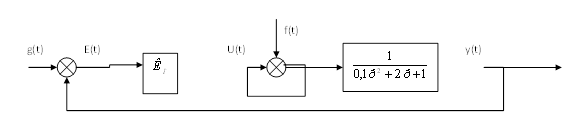
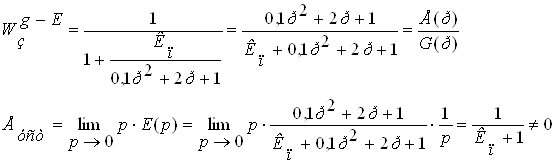
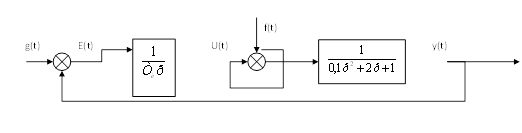
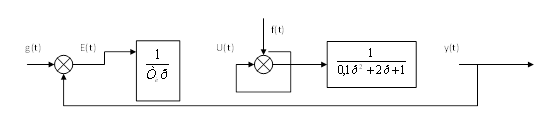
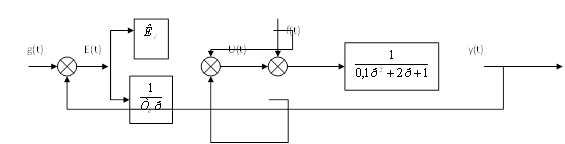
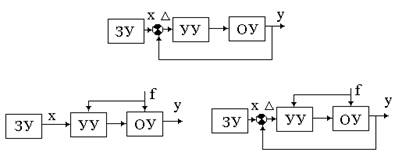
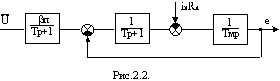
1. По заданной системе уравнений получить передаточную функцию объекта управления и составить структурную схему замкнутой САУ, считая регулятор звеном с входной величиной Е, выходной U и передаточной функцией ![]()
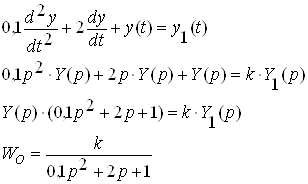

![]()

2. Выбрать регулятор таким образом, чтобы система обладала свойством астатизма по отношению к постоянному задающему g(t) и возмущающему f(t) воздействию.
Для того чтобы система обладала астатизмом необходимо выполнение условия – величина установившейся ошибки по заданию и возмущению должна быть равна 0. Проверим это условие на регуляторах:
· Выбираем П – регулятор
Т.к. величина установившейся ошибки не равна нулю, то система не обладает астатизмом,, а следовательно считать ошибку по каналу f-E нет необходимости.
· Выбираем И – регулятор
![]()
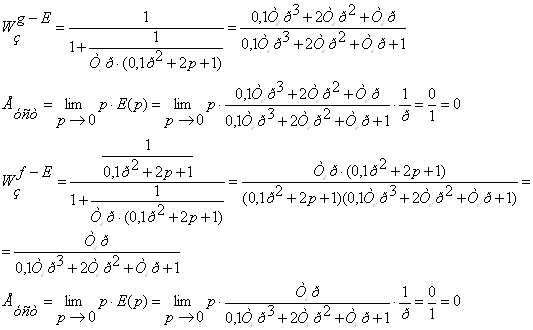
Обе ошибки равны нулю следовательно система с И - регулятором является астатической. Данный регулятор нам подходит
· Проверим наш ПИ – регулятор
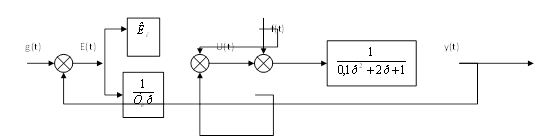
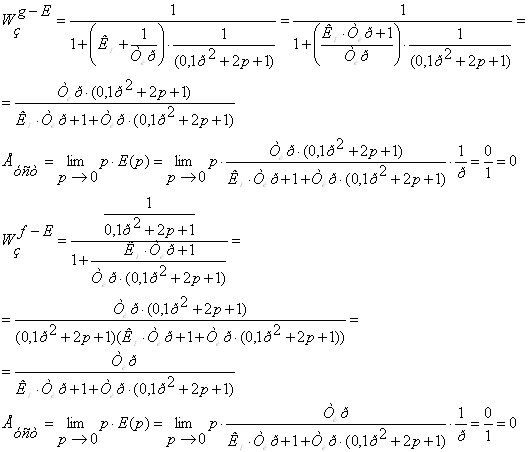
Система так же является астатической, что является тем, что выбранный нами ПИ – регулятор подходит к условию задания.
3. Найти область значений постоянной времени регулятора для И – закона управления, обеспечивающих устойчивость системы.
Найдем передаточную функцию замкнутой системы по каналу g-y и затем выделим ее характеристическое уравнение.
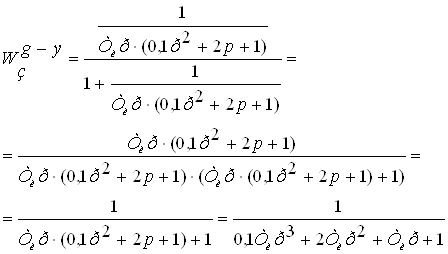
Характеристическое уравнение Q(p):
![]()
Уравнение 3 порядка, следовательно, для устойчивости системы необходимо чтобы произведение внутренних коэффициентов характеристического уравнения было больше произведения внешних коэффициентов.
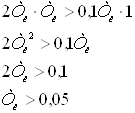
Следовательно область значений ![]() для И – закона можно определить интервалом
для И – закона можно определить интервалом ![]() .
.
4. Для И – закона регулирования найти минимальную возможную величину установившейся ошибки, если g(t)=2t и f(t)=-3t.
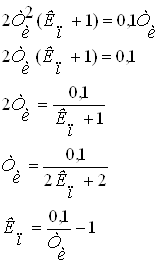
Для определения минимальной установившейся ошибки нам необходимо узнать при каком значении постоянной времени система находится на границе устойчивости. Для этого отыщем передаточную функцию и характеристическое уравнение системы с И – регулятором. И затем найдем значение ![]()

![]()
Находим значение постоянной времени на границе устойчивости:
Найдем величину установившейся ошибки при g(t)=2t и f(t)=-3t
![]()
Поскольку задающее воздействие у нас g(t)=2t, то используя преобразование Лапласа получаем:

![]()
тогда величина установившейся ошибки будет

Подставляем полученное значение ![]() и получаем
и получаем
![]()
Найдем ошибку по каналу f-E
Подставляем ![]() и получаем
и получаем ![]()
Тогда ![]()
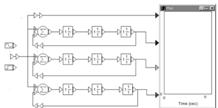
5. Построить, с использованием ЭВМ, область устойчивости, на плоскости, параметров регулятора при использовании ПИ – закона, обосновать возможность и путь получения допустимой установившейся ошибки при ![]() и
и ![]() .
.
Для построение области устойчивости необходимо найти характеристическое уравнение передаточной функции для данного регулятора.

Отсюда:
![]()
Запишем условие, при котором система находится на границе устойчивости:
![]()
Выразим зависимость
![]() от
от ![]()
Строим область устойчивости по по лученной зависимости:
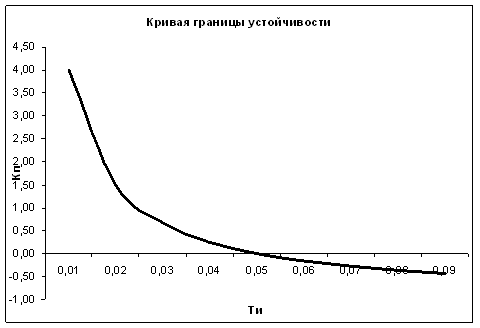
| Ти | Кп |
| 0,01 | 4,00 |
| 0,02 | 1,50 |
| 0,03 | 0,67 |
| 0,04 | 0,25 |
| 0,05 | 0,00 |
| 0,06 | -0,17 |
| 0,07 | -0,29 |
| 0,08 | -0,38 |
| 0,09 | -0,44 |
Таким образом выбирая значения параметров регулятора над границей устойчивости – мы получаем устойчивую систему, и наоборот.
Похожие работы
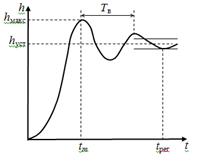
... частот, то переходная характеристика будет колебательной. Переходная характеристика является показателем качества при быстро изменяющемся воздействии. Для систем авторегулирования лучшей считается колебательная переходная характеристика с быстрым затуханием колебаний на вершине (рис. 4). Рис. Обычно используются следующие числовые параметры переходной характеристики: время достижения ...


... значениях функции. Начальное значение функции:. (2.10) Конечное значение функции: . (2.11) 7. Теорема запаздывания . (2.12) 4. Дифференциальные уравнения САУ При математическом описании систем автоматического управления составляют уравнения статики и динамики. Уравнения статики описывают установившиеся режимы и, как правило, являются алгебраическими. Уравнения динамики ...
... главную регулируемую обратную связь и дополнительные обратные связи. 1 ФУНКЦИОНАЛЬНАЯ СХЕМА ОБЪЕКТА УПРАВЛЕНИЯ В качестве объекта управления используется управляемый полупроводниковый выпрямитель, двигатель постоянного тока независимого возбуждения типа 2ПН-132МУХЛ4. Вал двигателя соединен с тахогенератором. Выписываем из справочника параметры двигателя: Pн=2,5кВт Nн=1000 об¤мин; Nм=4000 ...
... состоит в построении системы управления; в нее входит выбор схемы управляющих устройств, элементов и их параметров, соединение автоматизированной и неавтоматизированной части, реализующих информационную технологию управления. Специфика построения систем организационного управления, где основным элементом объекта управления и управляющей части выступает управленческий персонал, рассматривается в ...
0 комментариев