Навигация
Проекция геометрических объектов
18405
знаков
0
таблиц
0
изображений
Курсовая работа
Проекция геометрических объектов
Студент
Преподаватель
2009
Содержание
1. Использование метода секущих плоскостей для создания проекции пересечения поверхностей фигур
2. Использование метода секущих плоскостей для создания разветки пересечения поверхностей фигур
3. Построение изометрии взаимного пересечения поверхностей фигур
4. Создание фигуры с вырезом
5. Процесс создания опоры
6. Процесс создания стойки
1. Использование метода секущих плоскостей для создания проекции пересечения поверхностей фигур
Вспомогательные секущие плоскости применяют для построения линии пересечения поверхностей, которые пересекаются с этими плоскостями по графически простым линиям – прямым и окружностям. Такая возможность существует в трех случаях:
1.Если образующие (окружности) расположены в общих плоскостях уровня.
2.Если в общих плоскостях уровня оказываются прямолинейные образующие линейчатой поверхности и окружности циклической.
3.Линейчатые каркасы заданных поверхностей принадлежат общим плоскостям уровня или пучкам плоскостей общего положения.
При решении задач на построение линии пресечения поверхностей вспомогательные секущие плоскости обычно выбирают в виде плоскостей уровня – плоскостей параллельных плоскостям проекций. Как всегда в таких случаях, построение начинают с нахождения опорных точек линии, т.к. они позволяют видеть, в каких границах можно изменять положение вспомогательных секущих плоскостей. Произвольные же точки кривой строят с помощью указанного способа.
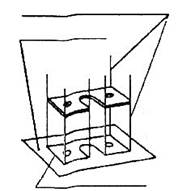
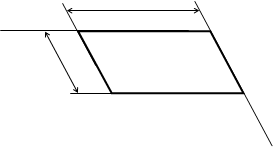
В данной работе пересекаются три поверхности – полусфера, цилиндр и призма.
Полусфера – половина сферы (Сфера радиуса R – множество точек пространства, равноудаленных от одной точки на положительное расстояние R.Сфера является фигурой вращения, т.е образована при вращении криволинейной образующей вокруг неподвижной оси).
Цилиндр - тело, ограниченное замкнутой цилиндрической поверхностью и двумя выделившими ее сечениями – основаниями цилиндра.
Призма – многогранник, у которого две грани (основания) лежат в параллельных плоскостях, а все ребра вне этих граней параллельны между собой.
Линией пересечения поверхностей является множество точек, общих для данных поверхностей. При пересечении полусферы и цилиндра получается эллипс (эллипс – это плоская фигура, у которой для каждой точки сумма расстояний от двух фиксированных точек (фокусов) постоянна), а полусферы и призмы – плоская кривая (это кривая, точки которой не лежат на одной прямой).
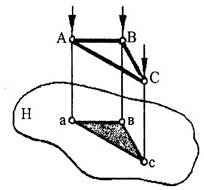
Сначала рассмотрим взаимное пересечение полусферы и призмы. Из характера расположения поверхностей следует, что целесообразно применять секущие горизонтальные плоскости уровня. Сперва находим опорные точки прямой. При пересечении первой вспомогательной секущей плоскости ( ) получаем точку 1 . На плоскости П проводим окружность из центра полусферы радиусом равным расстоянию от оси полусферы до точки пересечения вспомогательной секущей плоскости с самой полусферой на плоскости П . При пересечении этой окружности и главного меридиана полусферы получим точку 1 . Аналогично получаем опорную точку 4 и 4 и произвольные точки 2 ,2 и 3 ,3 .( при пересечении вспомогательных секущих плоскостей – а П , а П , а П ). При соединении этих точек получаем плоские кривые, которые и являются линиями пересечения полусферы и конуса. Видимость будет ограничена точками 4 и 4 . Поэтому невидимую линию пересечения от точки 4 до точки 4 проводим пунктиром с помощью циркуля, так же как и невидимый контур полусферы, закрытый призмой. Для того что бы показать эту же линию пересечения на проекции П , нужно отметить точки 1 , 2 ,3 ,4 , которые лежат на параллельных линиях проекционной связи (из проекции П ) на расстоянии равном длине отрезка от оси полусферы до точек 1 ,2 ,3 ,4 на П . Несуществующий контур полусферы проводим тонкой линией.
Сейчас рассмотрим взаимное пересечение полусферы и цилиндра. Пересечением полусферы и цилиндра является пространственная кривая. Чтобы ее построить воспользуемся тем же методом вспомогательных секущих плоскостей. Опорными точками в данном случае будут являться точки 8 и 9 ,которые получаются при пересечении первой вспомогательной секущей плоскости – в П . Далее находим произвольные точки 5 ,6 и 7 с помощью секущих плоскостей в П ,в П ,в П . Так же как и в первом случае соединяем и получаем линию пересечения полусферы и цилиндра на плоскости П .Несуществующую линию полусферы проводим тонкой линией. Аналогично строим эллипс на проекции П с помощью линий проекционной связи. Видимость будет ограничена точками 5 и 5 .Невидимую часть эллипса проводим пунктиром, а несуществующий контур полусферы тонкой линией.
2. Использование метода секущих плоскостей для создания разветки пересечения поверхностей фигур
Для построения линии пересечения некоторых поверхностей нерационально использовать плоскости в качестве вспомогательных секущих поверхностей (посредников). Например, если пересекаются две поверхности вращения общего вида с пересекающимися осями, то никакие плоскости не помогут рассекать одновременно эти поверхности по линиям, которые проецировались бы в графически простые линии. В таких случаях целесообразно применять способ вспомогательных секущих сфер. В самом деле, сферы обладают большими преимуществами по сравнению с другими посредниками, так как на сфере можно взять бесчисленное множество окружностей и проекции сферы легко построить, что позволяет определить линию пересечения поверхностей с достаточной степенью точности.
Существует способ концентрических сфер и эксцентрических. Способ концентрических сфер применяют для построения линии пересечения двух поверхностей вращения с пересекающимися осями, а эксцентрических – для построения линии пересечения поверхностей вращения и циклических поверхностей, имеющих общую плоскость симметрии.
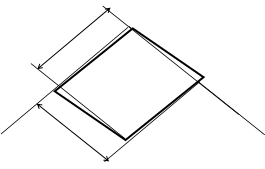
Рассмотрим линию пересечения двух поверхностей вращения (цилиндра и конуса), которую будем находить способом концентрических сфер.
Цилиндр – тело вращения, ограниченное замкнутой цилиндрической поверхностью и двумя выделившими ее сечениями – основаниями цилиндра.
Конус – тело вращения, состоящее из основания – плоской фигуры, ограниченной замкнутой линией(кривой или смешанной), вершины – точки, не лежащей в плоскости основания, и всех отрезков, соединяющих вершину со всевозможными точками основания.
Линией пересечения поверхностей является множество точек, общих для данных поверхностей. При пересечении конуса и цилиндра получается пространственная кривая.
Для того чтобы построить линию пересечения конуса и цилиндра способом вспомогательных секущих сфер сначала нужно вписать сферу максимального радиуса с центром, находящимся на пересечении осей тел вращения. Максимальным будет такой радиус, когда окружность будет проходить через наиболее удаленную точку пересечения тел. В данном случае мы имеем две опорные точки 1 и 2 .Точка 2 находится дальше от центра пересечения осей тел, значит, максимальная окружность будет проходить через нее. Затем проводим сферу минимального радиуса. Минимальным же будет радиус сферы, вписанной в большую по размеру поверхность. Для этого из центра пересечения осей тел вращения опускаем перпендикуляр к поверхности конуса и через эту точку проводим окружность. Она будет пересекать конус и цилиндр в двух точках. Соединим линиями точки пересечения у конуса и точки пересечения у цилиндра. На пересечении этих линий получим точку принадлежащую линии пересечения конуса и цилиндра. Для остальных промежуточных точек проводим вспомогательные сферы у которых Rmin < R < Rmax и аналогично находим еще несколько произвольных точек. Затем соединяем их плавной линией и получаем линию пересечения конуса и цилиндра. Несуществующий контур конуса проводим тонкой линией.
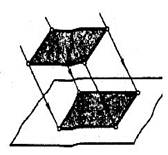
Далее переходим к развертке конуса. Представим поверхность в виде гибкой, тонкой нерастяжимой пленки. Оказывается, при таком условии некоторые поверхности можно, постепенно изгибая, совместить с плоскостью так, что при этом не будет разрывов и складок. Поверхности, обладающие указанными свойствами (многогранные, конические, цилиндрические, торсовые), называют развертывающимися, а фигуру, полученную от совмещения поверхности с плоскостью, - разверткой.
Развертки обладают следующими свойствами:
Длины двух соответственных линий развертки и поверхности равны между собой.
Углы, образованные линиями на поверхности, и углы между соответственными линиями на развертке также равны.
Замкнутая линия на поверхности и соответствующая ей линия на развертке ограничивают одинаковые площади, поэтому площадь развертки равна площади соответствующего отсека самой поверхности.
Из перечисленных свойств вытекают следующие следствия:
Следствие 1: Прямая на поверхности переходит в прямую на развертке.
Следствие 2: Параллельным прямым, лежащим на поверхности, соответствуют параллельные прямые на развертке.
Для построения развертки поверхности конуса, для начала перерисуем его без врезающегося цилиндра и с видимым основанием, которое делим на равные части с помощью циркуля раствором равным радиусу основания цилиндра. Отметим точки 1 , 2 ,3 ,4 ,5 ,6 ,7 .Чтобы найти точки, по которым нужно построить линию пересечения конуса и цилиндра, проводим образующие на которых они лежат, и на пересечении их с линиями проекционной связи получаем точки A ,B ,C ,D , F ,G .
Затем переходим к самой развертке. Развертка прямого конуса имеет форму кругового сектора, который мы чертим циркулем, раствор которого равен высоте конуса, и ограничиваем образующими с обеих сторон. Делим основание развертки конуса на равные части как на предыдущем рисунке, а на образующих находим точки, принадлежащие линии пересечения конуса и цилиндра, которые соединяем плавной линией.
Похожие работы
... при определенных условиях значительно повысить эффективность обучения. Глава II. Техническая составляющая проектирования и разработки ЭУК 2.1 Анализ предметной области дисциплины Данный обучающий модуль электронный учебный курс по дисциплине «Начертательная геометрия, инженерная графика» разработан для студентов Института профессионального образования и информационных технологий ...
... подытожим: движение человеческого тела находится в сложном структурном отношении со следующими тремя топологическими конструкциями: движение в пространстве, пространство движения и геометрический образ движения, определяющий само движение и одновременно определяемый им. Изложенный топологический подход следует понимать не как обращение к математизации, формализации и моделированию движения, а, ...
... урока. Таким образом, выбор методов преподавания является большим и важным делом. Заключение Данная курсовая работа была посвящена теме «Методика изучения раздела «Графика» в 8 классе». Этот раздел является составной частью комплексной дисциплины «Технология». В ходе написания работы было проанализировано содержание технологического образование школьников, большое количество учебной и ...

... для решения самые простые задачи, чтобы дать ему возможность поверить в свои силы[10]. Глава 2. Применение методики развития пространственного мышления на уроках черчения 2.1. Роль и место развития пространственного мышления на уроках черчения На основе длительных теоретических и экспериментальных исследований для определения сформированности у учащихся пространственного представления, их ...
0 комментариев