АНАЛІЗ МЕТОДІВ РОЗРОБКИ СИСТЕМ КЕРУВАННЯ ЕЛЕКТРОПРИВОДОМ ДИЗЕЛЬ-ПОТЯГУ
РОЗРОБКА МОДЕЛІ СИСТЕМИ КЕРУВАННЯ ЕЛЕКТРОПЕРЕДАЧІ ДИЗЕЛЬ-ПОТЯГУ
Моделювання пристроїв САК об’єкта керування
Розробка моделі блоку «синхронний генератор-випрямлювач» електропередачі дизель-потягу з використанням нейронних мереж
РОЗРОБКА СИСТЕМИ КЕРУВАННЯ ЗА ДОПОМОГОЮ МЕТОДІВ НЕЧІТКОЇ ЛОГІКИ І НЕЙРОННИХ МЕРЕЖ ДЛЯ ОПТИМІЗАЦІЇ ДИНАМІЧНИХ ПРОЦЕСІВ ЕЛЕКТРОПРИВОДА
Розробка регуляторів системи керування електропередачі дизель-потяга з використанням нейронних мереж
Розробка системи керування дизель-потяга на основі нейромережевих технологій
ДОСЛІДЖЕННЯ СИСТЕМ КЕРУВАННЯ ДИЗЕЛЬ-ПОТЯГА
Дослідження регуляторів системи керування, розроблених на основі використання методів нечіткої логіки і нейромережевих технологій
ЕКОНОМІЧНА ОЦІНКА Й ОБГРУНТУВАННЯ
Конкуренція
Оцінка ризику та страхування
Параметри мікроклімату
Випромінювання від екрана
ЦИВІЛЬНА ОБОРОНА
Навигация
ДОСЛІДЖЕННЯ СИСТЕМ КЕРУВАННЯ ДИЗЕЛЬ-ПОТЯГА
Розробка, дослідження системи керування на основі нейронної мережі
162243
знака
21
таблица
52
изображения
4. ДОСЛІДЖЕННЯ СИСТЕМ КЕРУВАННЯ ДИЗЕЛЬ-ПОТЯГА
4.1. Дослідження регуляторів системи керування, розроблених на основі використання принципу регулювання за помилкою та ПІД закону керування
У розділі 2 приведені математична модель і структура САР електропередачі дизель-потяга, виконаних у відповідності до традиційних підходів на основі використання принципу регулювання за помилкою, тобто компенсація сигналу завдання сигналом зворотного зв'язку. Як правило, такі САР будуються з використанням пропорційно-інтегрально-диференціального закону керування, де в колі регулювання міститься блок задавання інтенсивності, що у залежності від сигналу, що надходить на його, (зростання чи убування) має різні постійні часу.
Одна з можливих структур САР електропередачі містить три контури регулювання: підтримка сталості струму (для заданої позиції контролера машиніста); підтримка сталості потужності; обмеження максимального значення напруги живлення. Усі ці контури з погляду реалізації САР ідентичні, однак функціонують у різних, з погляду динаміки, умовах. Найбільш критичним до зміни умов функціонування є контур САР, що забезпечує підтримку сталості струму (обмеження струму), оскільки його робота пов'язана з режимом пуску, де до якісних показників системи пред'являються досить "жорсткі" вимоги. Особливо це відноситься до такого показника якості, як величина перерегулювання. У якості фізичної досліджуваної величини тут виступає струм фази асинхронного двигуна, що комутується перетворювачем частоти, який має гранично допустимі значення сили струму, що протікає через його елементи.
Дослідження, пов'язані з визначенням параметрів САР і уточненням структури САР, проводилися в кілька етапів. При цьому досліджувану структуру САР можна представити як таку, що складається з кола задавання, формувача сигналу керування (пропорційно-інтегрального регулятора і блоку задавання інтенсивності), об'єкта керування (моделі тягового асинхронного двигуна), блоку формування сигналу зворотного зв'язку (датчики, підсилювачі, що масштабують, фільтри) [30].
За допомогою блоку завдання формувався сигнал, що відповідає визначеній позиції контролера машиніста і характеризується визначеною швидкістю його наростання.
Тут і надалі , як показник завантаженості складу (тобто його загальної маси чи моменту інерції) використовувався показник p/J,
де р - число пар полюсів асинхронного двигуна,
J - момент інерції поїзду, приведений до колісної пари.
На першому етапі проводилися дослідження САР з метою визначення параметрів регулятора каналу відсічення по струму, виконаного відповідно до традиційної схеми, описаної в розділі 2. Основна увага приділялася питанням, зв'язаним з адекватністю розроблених моделей і визначенням параметрів САР, що забезпечують задану якість регулювання. При цьому показниками якості виступали величина перерегулювання, час перехідного процесу (tпп ), число перерегулювання (N).
Для проведення досліджень з метою уточнення структури і визначення параметрів САР необхідно мати моделі блоків САР (формувачів сигналу задавання, формувачів сигналів зворотних зв'язків, тягових двигунів), які адекватно відображають процеси, що протікають у самому об'єкті керування. При цьому, як було відзначено в розділі 2, при розробці структури САР доцільно на першому етапі використовувати спрощену схему моделі ТАД, за допомогою якої може бути зроблене уточнення структури й оцінка параметрів САР з погляду стійкості роботи і визначення припустимих границь зміни параметрів, а на другому - повну модель, що описує перехідні процеси ТАД, наприклад на підставі системи диференціальних рівнянь в рухомій системі координат.
Оскільки одержання спрощених моделей ТАД і їхнього дослідження приведено в другому розділі, то тут приділяється увага тільки адекватності моделі ТАД, представленої системою диференціальних рівнянь в рухомій системі координат.
Адекватність моделі ТАД доводиться за допомогою деякої інтегральної оцінки функціонування всієї системи при розгоні дизель-потяга й аналізу отриманих при цьому інтегральних характеристик (швидкості руху, величини ковзання) щодо теоретичних передумов.
На рис 4.1 - 4.3 приведені процеси розгону дизель-потяга при різних темпах наростання напруги живлення ТАД. При одній і тій же завантаженості складу (p/J = 0.0001) і законі керування U/f = 10.
Тут: 1 - крива, що відповідає напрузі живлення (U, B) ТАД у визначений момент часу;
2 - електрична кутова частота живлення (w0, 1/сек) ТАД;
3 - електрична кутова частота обертання ротора (w , 1/сек) ТАД.
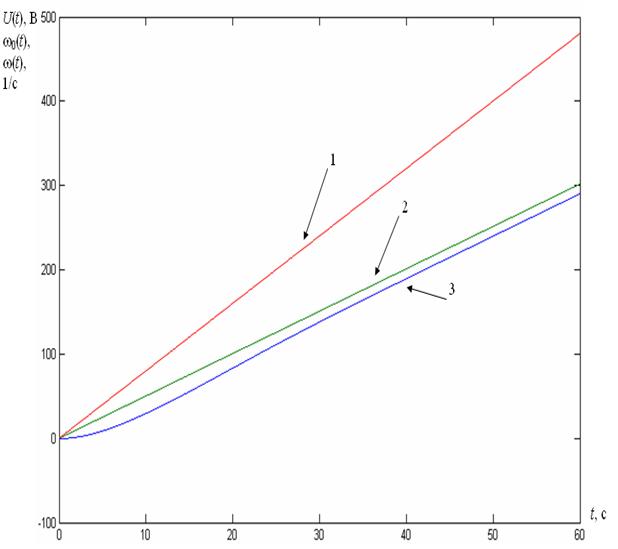
Рис. 4.1. Процеси розгону дизель-потягу при наступних параметрах:
p/J = 0.0001; U/f = 10; темп нарощування напруги живлення ТАД – 8 B/сек.
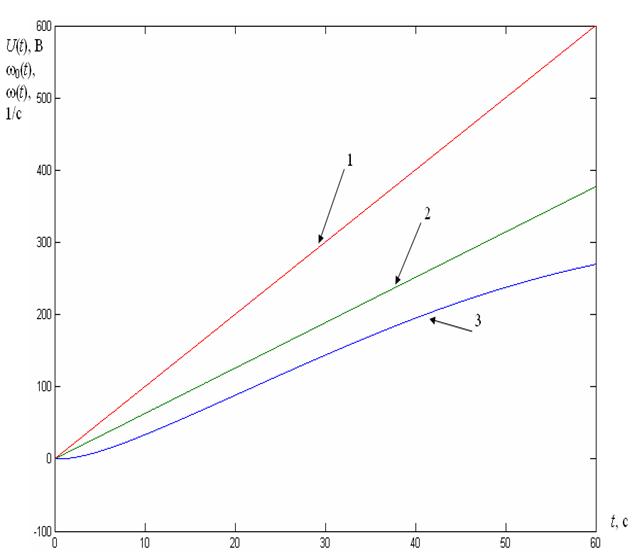
Рис. 4.2. Процеси розгону дизель-потягу при наступних параметрах:
p/J = 0.0001; U/f = 10; темп нарощування напруги живлення ТАД – 10 B/сек.
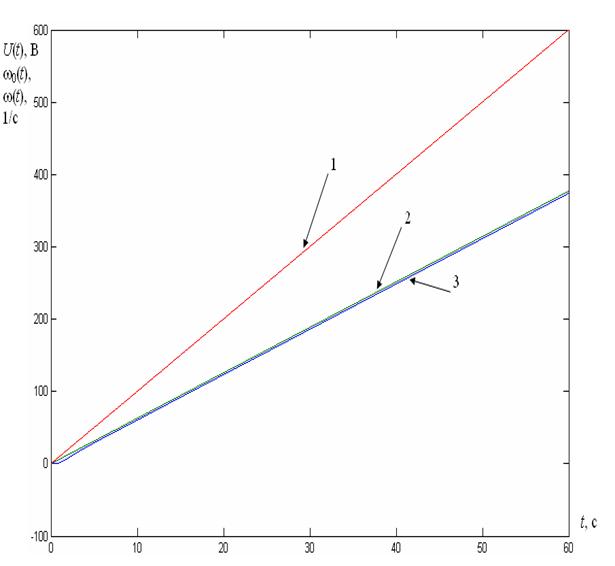
Рис. 4.3. Процеси розгону дизель-потягу при наступних параметрах:
p/J = 0.0005; U/f = 10; темп нарощування напруги живлення ТАД – 10 B/сек.
Як випливає з рис. 4.1 при даному темпі наростання напруги живлення ТАД і законі керування напругою і частотою процес розгону протікає нормально, на що вказує така узагальнена характеристика, як ковзання, яка у даному випадку знаходиться в межах від 2 Гц до 3,5 Гц, що відповідає теоретичним передумовам. У випадку зменшення темпу наростання напруги живлення, наприклад до величини 5 B/сек, процес розгону протікає нормально, але з меншим значенням величини ковзання (від 1 Гц до 2 Гц), що не суперечить теоретичним передумовам.
При збільшенні темпу наростання напруги живлення ТАД до величини 10 B/сек - процес розгону протікає не нормально (рис. 4.2), на що вказує величина ковзання (досягає величини 16 Гц, що не природно). Якщо ж зменшити масу складу, наприклад як у нашому випадку, у 5 разів (p/J = 0.0005), що близько до роботи тягових двигунів у режимі неробочого ходу (див. рис. 4.3), то розгін протікає практично при ковзанні близькому до нульового значення, що характерно для роботи ТАД у такому режимі. Збільшення темпу наростання напруги живлення ТАД (наприклад, 12 B/сек) при p/J = 0.0005 не вносить істотних змін у процес розгону, тобто розгін здійснюється при ковзанні близькому до нульового значення.
Проведені дослідження з моделлю об'єкта керування, тобто моделлю ТАД, представленою системою диференціальних рівнянь в обертовій системі координат указують на те, що модель адекватно відображує процеси, що відбуваються при розгоні дизель-потяга, адекватно реагує на зміну факторів, що збуджують, і законів керування, дає можливість установити можливий (робочий) діапазон зміни значень темпу зміни сигналів керування напругою і частотою. Це дозволяє використовувати дану модель об'єкта керування як для уточнення структури САР електропередачі, так і визначення її параметрів згідно вимог, обумовлених до якісних показників перехідного процесу.
Наступні дослідження даного підрозділу спрямовані безпосередньо на уточнення структури САР і визначення її параметрів.
Вихідна структура моделі САР каналу відсічення по струму приведена на рис. 4.4.
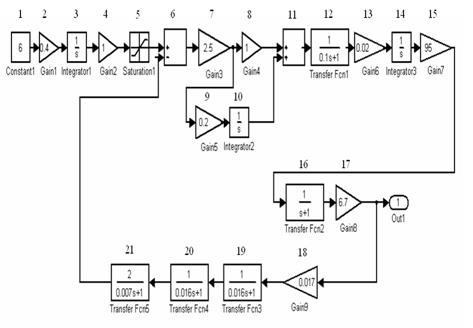
Рис. 4.4. Структура моделі САР каналу відсічення по струму.
Тут: блоки (1-5) - модель формування сигналу задавання по струму; блоки (6-11) - модель регулятора на основі пропорційно-інтегрального закону керування; блок (12) - фільтр; блоки (13, 14) - модель блоку задавання інтенсивності (без обліку завдання різних постійних часу в залежності від зміни вхідного сигналу); блоки (15 - 17) - модель об'єкта керування (формування струму фази ТАД); блоки (18 - 21) - модель пристроїв узгодження і фільтруючих ланок, використовувані в ланцюзі зворотного зв'язку САР.
На рис. (4.5 - 4.8) приведені перехідні процеси, що відповідають току ТАД, при зміні одного з параметрів (коефіцієнта підсилення) САР. Відповідність процесів, параметрів і рисунків приведено в таблиці 4.1.
Таблиця 4.1. Результати досліджень
| № | K1 | K2 | K3 | K4 | Номер рис. | Dmin, сек | tmin, сек | Nmin |
| 1 | 2,5 | 1 | 0,2; 0,3; 0,4; 0,5; 0,6 | 0,2 | Рис. 4.6 | 29,78 | 20 | 4 |
| 2 | 2,5 | 1 | 0,2 | 0,02; 0,03; 0,04; 0,05; 0,06 | Рис. 4.7 | 25,28 | 45 | 8 |
| 3 | 2,5 | 1 | 0,2 | 0,02; 0,03; 0,04; 0,05; 0,1 | Рис. 4.8 | 13,2 | >50 | >20 |
| 4 | 2,5 | 1 | 0,2 | 0,15 | Рис. 4.9 | Процес не сталий |
Процеси, що відповідають параметрам, зазначеним у таблиці 4.1 і рис. 4.5, дають можливість оцінити якісні показники перехідного процесу. Найменше значення як величини перерегулювання Dmin, так і часу регулювання (tmin) і числа перерегулювання (Nmin) при значенні K3 = 0,2. Числові дані цих показників приведені в таблиці 4.1.
На рис. 4.6 приведені аналогічні процеси, але при зміні коефіцієнта підсилення K4 (блок задавання інтенсивності). Тут, як видно з процесів, представлених на даному рисунку, постійні часу блоку задавання інтенсивності (Тmin=16,6 сек, Тmах=50 сек) істотного впливу на величину перерегулювання не роблять, однак зі зменшенням постійної часу (збільшенням значення K4) збільшується швидкодія системи, що дуже важливо, однак збільшується коливальність (час перехідного процесу і число коливань).
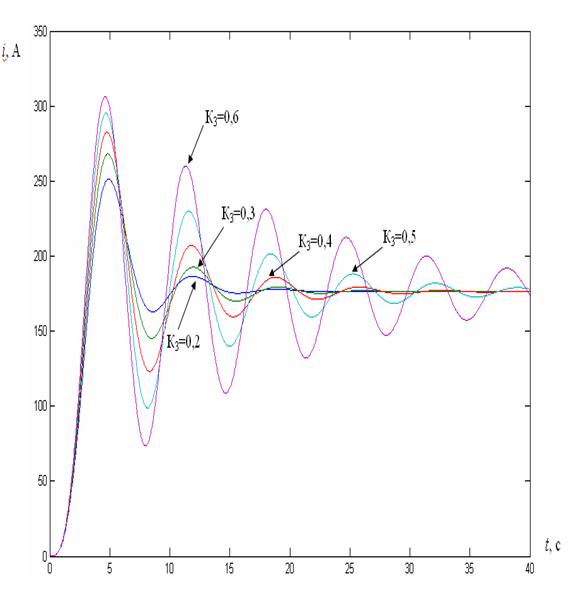
Рис. 4.5. Залежності струмів ТАД при зміні коефіцієнта K3.
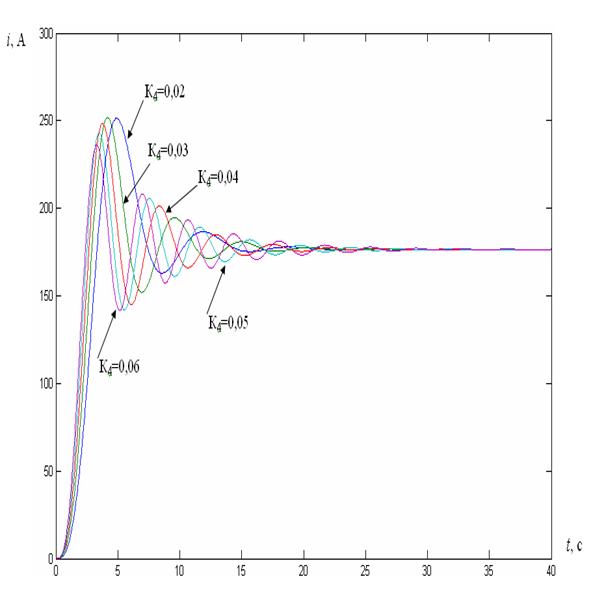
Рис. 4.6. Залежності струмів ТАД при зміні коефіцієнта K4.
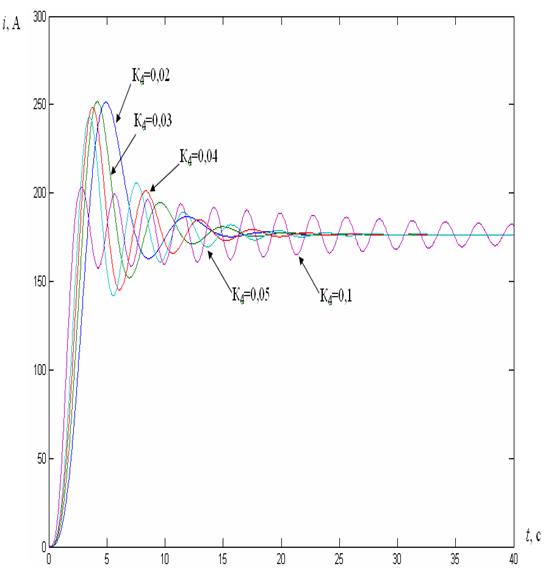
Рис. 4.7. Залежності струмів ТАД при зміні коефіцієнта K4(при максимальному K4=0,1).
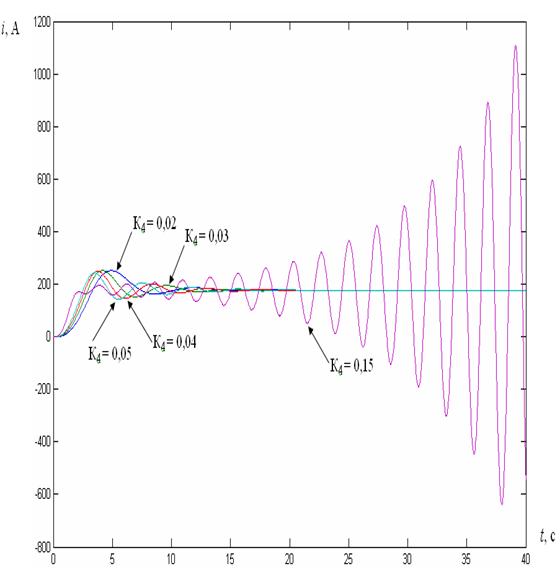
Рис. 4.8. Залежності струмів ТАД при зміні коефіцієнта K4(процес не стійкий).
На рис. 4.7 і рис. 4.8 приведені процеси, що дозволяють оцінити критичне значення K4, при якому система стає хитливою. При K4 = 0,1 - практично на границі стійкості, при K4 = 0,15 - не стійка.
Проведені експерименти з моделлю дозволяють установити для даної структури САР, обумовленою її моделлю (див. рис. 4.4), оптимальні значення параметрів з урахуванням близькості до необхідних показників якості перехідного процесу.
Оптимальні значення цих параметрів наступні: K1 = 2,5; K2 = 1; K3= 0,2; K4 = 0,02.
Однак значення величини перерегулювання дорівнює 29,78 %; час перехідного процесу - 20 сек; число перерегулювання - 4. Два останніх показники задовольняють необхідним умовам до вимог до якісних показників перехідного процесу, перший - не задовольняє. Тому необхідно в структуру САР увести блок задавання інтенсивності зі змінною структурою.
Результати досліджень, приведені на рис. 4.9 і рис. 4.10, характеризують протікання перехідних процесів за умови введення в системи САР блоку задавання інтенсивності зі змінною структурою, тобто , у якого параметри (постійна часу) при зростанні й убуванні вхідного сигналу - різні.
Перехідні процеси, приведені на рис. 4.9 відповідають:
- при убуванні - К = 0,02 (Т = 50 сек);
- при зростанні - 1 (К = 0,02); 2 (К = 0,04); 3 (К= 0,06); 4 (К= 0,08); 5 (К= 0,1).
Тут, на відміну від структури блоку задавання інтенсивності, у якого параметри на "накидання" і "скидання" не змінювалися і це приводило до нестійкості при постійної часі, рівній 12,5 сек, то в даному випадку така структура поліпшує систему САР і з погляду стійкості, і з погляду якісних показників. Навіть зменшення постійної часу до 10 секунд не призводить до хитливої роботи (рис. 4.10).
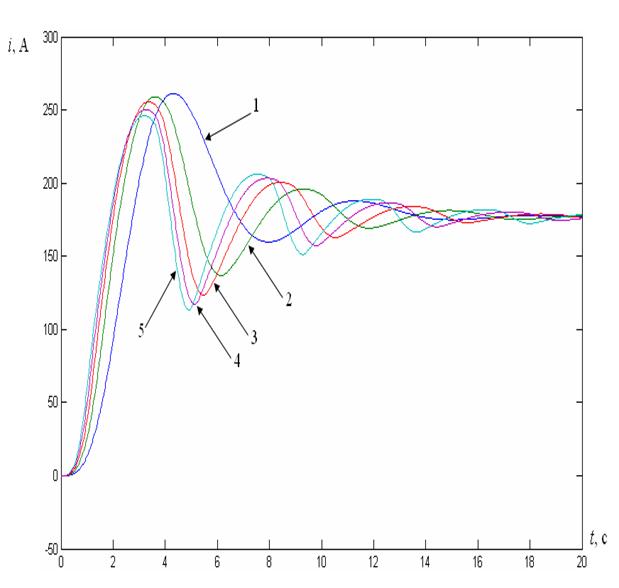
Рис. 4.9. Перехідні процеси в системі за умови введення блоку задавання інтенсивності
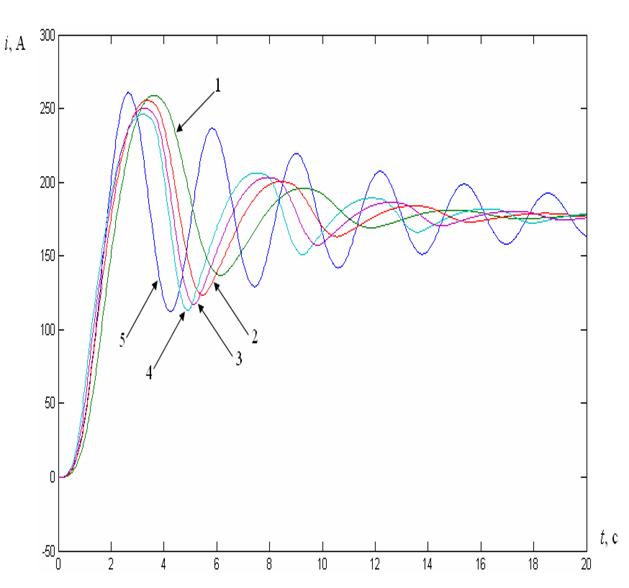
Рис. 4.10. Перехідні процеси в системі за умови введення блоку задавання інтенсивності.
Однак істотної зміни (зменшення) величини перерегулювання з уведенням блоку задавання інтенсивності зі змінною структурою домогтися не вдалося, хоча позитивний ефект мається в змісті забезпечення стійкості системи при збільшенні швидкодії (тобто робота блоку задавання інтенсивності зі значно меншими значеннями постійних часу). При цьому встановлено, що прийнятні значення з погляду забезпечення якісних показників відповідають: при "накиданні" - Т = 12,5 секунд; при "скиданні" - Т = 50 секунд.
Структурна схема моделі для реалізації блоку задавання інтенсивності зі змінною структурою приведена на рис 4.11. Тут же зазначені і параметри настроювання моделі.
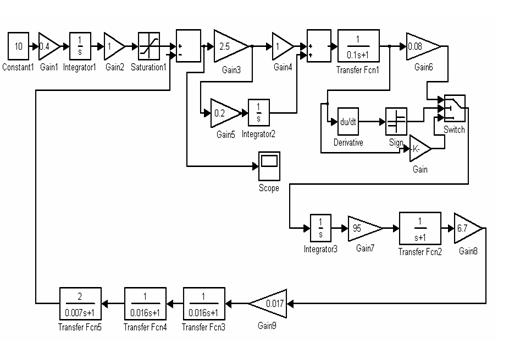
Рис. 4.11. Структурна схема моделі для реалізації блоку задавання інтенсивності зі змінною структурою.
На рис. 4.12 приведені процеси, що характеризують роботу САР з використанням блоку задавання інтенсивності зі змінною структурою і коригувальної ланки у виді зони нечутливості.
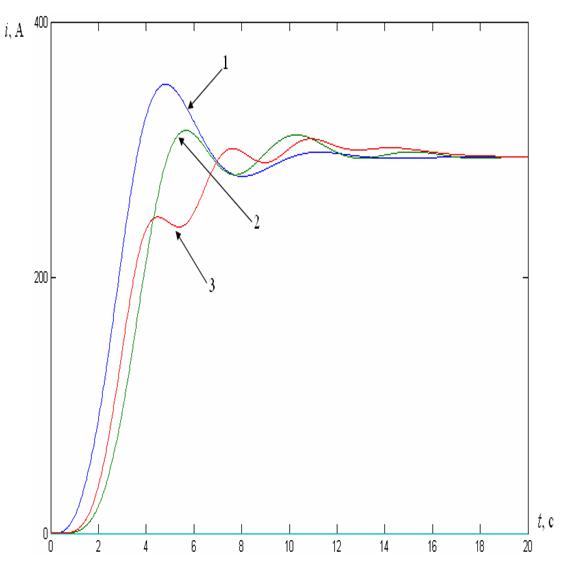
Рис. 4.12. Процеси, які характеризують роботу САР з урахуванням блоку задавання інтенсивності зі змінною структурою та коригувальної ланки.
Тут: 1 - процес, що відповідає САР з використанням блоку задавання інтенсивності з незмінною структурою;
2 - із блоком задавання інтенсивності незмінної структури і коригувальної ланки у виді зони нечутливості;
3 - із блоком задавання інтенсивності змінної структури і коригувальної ланки у виді зони нечутливості.
При заданих параметрах механічної частини електропривода, параметри САР, що забезпечують необхідні показники якості наступні: K1 = 2,5; K2 = 1; K3 = 0,2; K4 (накидання Т = 12,5 сек; скидання Т = 50 сек). Поріг зони нечутливості - (+/- 10,5 В). САР, відповідно до даної моделі, забезпечує функціонування системи з наступними показниками якості перехідного процесу: величина перерегулювання - не більш 6 %; час перехідного процесу - не більш 14 секунд; число перерегулювання - 3, що є цілком припустимим при технічній реалізації САР.
Похожие работы

... інші території. На додаток до цього моделі прогнозування в СППР та основані на реальних знаннях системи часто використовуються як настільні, розраховані на одного користувача системи. Системи підтримки прийняття рішень набули широкого застосування в економіках передових країн світу, причому їхня кількість постійно зростає. На рівні стратегічного управління використовується ряд СППР, зокрема для ...

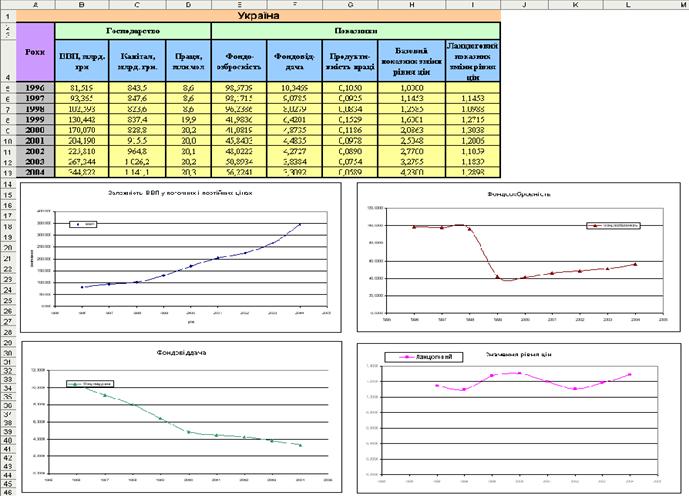
... періоді. Цей прогноз після Кабінету Міністрів України його головних показників є орієнтиром для підготовки пропозицій про визначення економічної політики на середньостроковий період. 3. ПРОГНОЗУВАННЯ РОЗВИТКУ ДИНАМІКИ УКРАЇНИ ЯК ГОСПОДАРСЬКОЇ СИСТЕМИ Порядок виконання роботи: а) Введення вихідних даних і одержання похідних рядів. Ввів в таблицю часові ряди, що відповідають вихідним даним ...
... різця й шорсткості обробленої поверхні; - розробити методику оцінки й визначити ймовірність руйнування різців, які оснащені круглими алмазно-твердосплавними пластинами. Об'єкт досліджень – процес чистового та напівчистового точіння силумінів різцями, які оснащені АТП. Предмет досліджень – надійність інструментів з алмазних композиційних НТМ на прикладі АТП, реєстрація та аналіз сигналів АЕ. ...
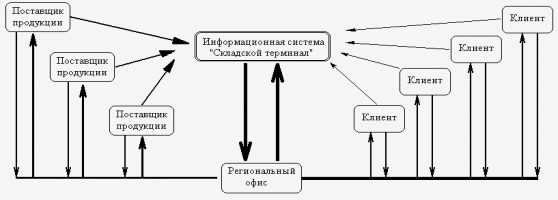

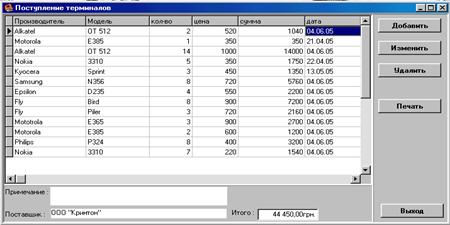
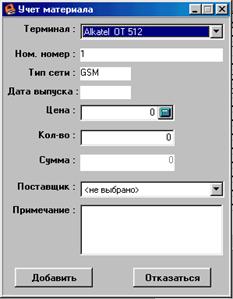
... , хоча воно й може змінюватися при зміні інформації, що зберігається в базі даних. 2.4 Опис програми, форм, звітів Файлом, що запускає інформаційну систему «Облік мобільних терміналів» є здійсненний файл PR.EXE. Розглянемо дії користувача при роботі з системою. Оператор системи обліку і аналізу розрахунків з постачальниками (менеджер) запускає програму на виконання (виконувальний файл PR.exe ...
0 комментариев