Навигация
Практическая реализация метода Халецкого
11265
знаков
1
таблица
9
изображений
3. Практическая реализация метода Халецкого
3.1 Программа на языке Pascalprogram kursovaya;
uses crt;
const sizemat=10;
type mattype=array[1..sizemat,1..sizemat] of double;
mattype1=array[1..sizemat] of double;
{Процедура для вывода матрицы на экран}
procedure writemat (var a:mattype; n,m:byte);
var i,j:byte;
begin
writeln;
for i:=1 to n do
begin
for j:=1 to m do
write(a[i,j]:7:3,' ');
writeln
end;
end;
{Процедура для ввода значений элементов матрицы}
procedure inputmat (var a:mattype;var d:mattype1; var n:byte);
var i,j:byte;
begin
writeln;
write ('Введите размер матрицы = ');
readln(n);
writeln;
writeln('Введите матрицу:');
writeln;
for i:=1 to n do
for j:=1 to n do
read (a[i,j]);
writeln;
writeln('Введите свободные коэффициенты:');
writeln;
for i:=1 to n do
readln(d[i]);
writeln;
end;
{Процедура получения двух треугольных матриц, произведение которых равно исходной матрице}
procedure getBnC(var a,b,c:mattype; n:byte);
var k,i,a1,j:byte;
begin
for k:=1 to n do
for i:=1 to n do
begin
if k=i then c[k,i]:=1
else c[k,i]:=0;
b[k,i]:=0;
end;
for a1:=1 to n do
begin
if a1=1 then
begin
for i:=1 to n do
b[i,1]:=a[i,1];
for i:=2 to n do
c[1,i]:=a[1,i]/b[1,1];
end
else
begin
k:=a1;
for i:=a1 to n do
begin
b[i,k]:=a[i,k];
for j:=1 to k-1 do
b[i,k]:=b[i,k]-b[i,j]*c[j,k];
end;
i:=a1;
for k:=i+1 to n do
begin
c[i,k]:=a[i,k];
for j:=1 to i-1 do
c[i,k]:=c[i,k]-b[i,j]*c[j,k];
c[i,k]:=c[i,k]/b[i,i];
end;
end;
end;
end;
procedure otvet(var b,c:mattype; d:mattype1; n:byte);
var x,y,s:mattype1;
i,j,k:byte;
w,q:double;
y1,x1:mattype;
begin
for i:=1 to n do
if i=1 then y[i]:=d[i]/b[i,i]
else
begin
w:=0;
for k:=1 to i-1 do
begin
y1[i,k]:=w+b[i,k]*y[k];
w:=y1[i,k];
end;
y[i]:=(d[i]-w)/b[i,i];
end;
for i:=n downto 1 do
if i=n then x[i]:=y[i]
else
begin
q:=0;
for k:=i+1 to n do
begin
x1[i,k]:=q+c[i,k]*x[k];
q:=x1[i,k];
end;
x[i]:=y[i]-q;
end;
writeln;
writeln('Ответ X:');
writeln;
for i:=1 to n do
writeln('x[',i,']= ',x[i]:1:4);
writeln;
end;
{Основная программа}
var a,a1,c,b:mattype;
d:mattype1;
n:byte;
begin
clrscr;
writeln ('Курсовая работа ');
InputMat(a,d,n); {Ввод матрицы A }
getBnC(a,b,c,n);{ Получение треугольных матриц B u C}
Writeln('Матрица B: ');
writemat(b,n,n);
readln;
Writeln('Матрица C: ');
writemat(c,n,n);
otvet(b,c,d,n);
readln;
end.
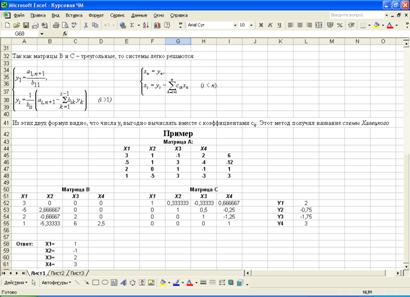
3.2 Решение в Excel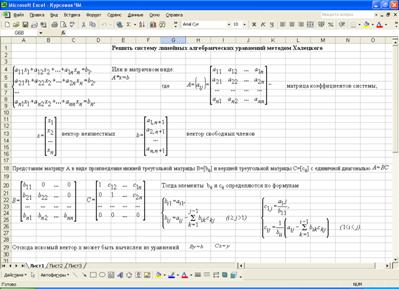
Заключение
Первым из алгоритмов, посвященным большому разделу решения систем линейных уравнений, представляем алгоритм Халейкого. Это фактически метод решения систем общего вида, конкурирующий по быстродействию с общеизвестным методом Гаусса-Жордана, но позволяющий более эффективно использовать решение.
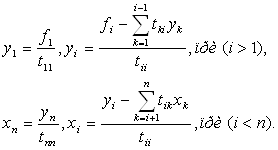
Если мы можем разложить матрицу линейной системы A в произведение A=L*U(B*C), где L(B) - нижняя, а U(C) - верхняя треугольные матрицы, то решение системы уравнений с произвольной правой частью производится весьма просто, применением двух обратных подстановок. Более того, в отличие от известного метода Гаусса-Жордана, разложенная матрица позволяет быстро решать серии линейных уравнений с различными правыми частями при одной и той же матрице.
Метод Халецкого позволяет провести LU-декомпозицию матрицы примерно за то же число операций, что и "прямая" часть метода Гаусса-Жордана. Итоговые коэффициенты двух треугольных матриц упаковываются в матрицу того же размера, что и A, и на том же месте в памяти. При этом верхняя матрица U размещается в наддиагональной части и на диагонали; нижняя L в поддиагональной части, а диагональные элементы L считаются все равными 1 (без ограничения общности) и не выводятся.
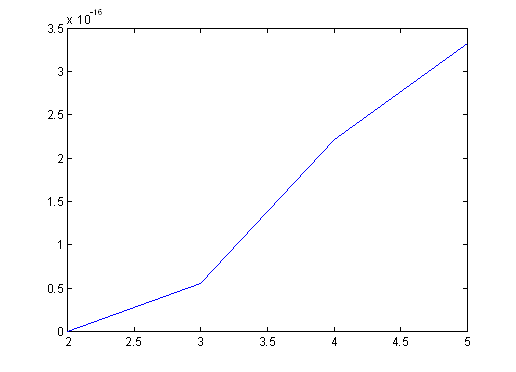
Метод Халецкого исключительно является точным методом, при этом предполагалось, что арифметические операции выполняются над точными числами. Если же метод реализуется на ЭВМ, то появляется вычислительная погрешность, заметим, что даже результаты точных методов являются приближенными из-за неизбежных округлений. Для итерационных процессов также добавляется погрешность метода.
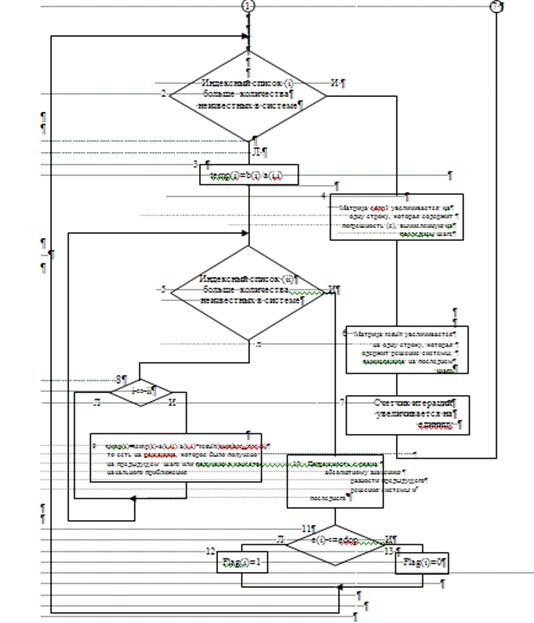
Схема Халецкого удобна для работы на вычислительных машинах, так как при представлении матрицы А в виде произведения нижней треугольной матрицы L и верхней треугольной матрицы U с единичной диагональю, операцию “накопления” можно проводить без записи промежуточных результатов.
Литература
1. Б.П. Демидович и И.А. Марон. “Основы вычислительной математики”, Москва, 1963г.
2. Н.С. Бахвалов, Н.П. Жидков, Г.М. Кобельков. “Численные методы”, Москва, 1987г.
3. Ю.П. Боглаев. “Вычислительная математика и программирование”, Москва, 1990г.
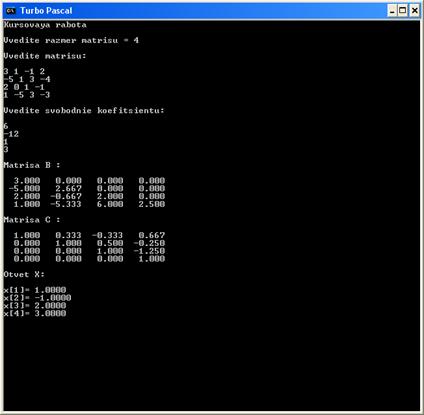
Приложение
Результаты работы программы:
Похожие работы



... , но выбор перехода к системе x=(x) зависит от типа конкретной решаемой системы линейных алгебраических уравнений. 6. Заключение В данной курсовой работе был реализован метод простой итерации для решения систем линейных алгебраических уравнений в виде двух программ, каждая из которых использует свой собственный способ перехода от системы вида F(x)=x к системе вида x=(x). Вообще говоря, ...
о неизвестных в уравнении. А это довольно таки трудоемко, особенно при больших порядках числа n. Еще одним точным методом для решения данных СЛАУ является рассматриваемый в данной работе метод квадратных корней для симметричной матрицы А. Изучать данный метод мы будем следующим образом. Сначала рассмотрим математическую постановку задачи для метода квадратных корней при решении СЛАУ. В данном ...



... образом, исходная система может быть представлена в виде: , откуда получаем: x =1, y = 2, z = 3. 2. Математические и алгоритмические основы решения задачи 2.1 Описание метода Метод Гаусса - классический метод решения системы линейных алгебраических уравнений (СЛАУ). Состоит в постепенном понижении порядка системы и исключении неизвестных. Пусть исходная система выглядит следующим ...
... шаг интегрирования ; tp – время интегрирования трех точечным методом прогноза и коррекции , ta – время интегрирования по методу Адамса-Башфорта , NU – массив начальных условий . Данная процедура способна производить решения систем линейных дифференциальных уравнений произвольного размера , на произвольном промежутке времени интегрирования . Вычисленные данные записываются в файлы prandcom*.df . ...
0 комментариев