Навигация
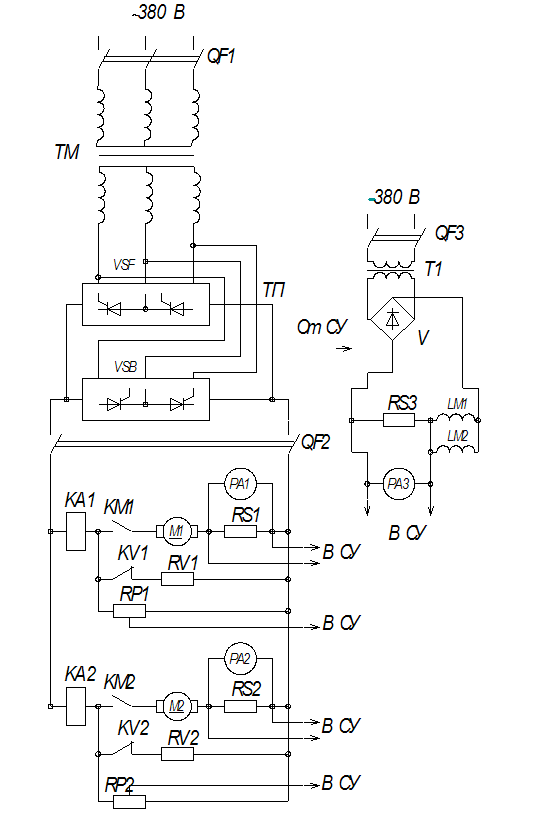
Структурная схема и управление электроприводом
18731
знак
4
таблицы
42
изображения
Ульяновский Государственный Технический Университет
Кафедра «Электропривод и автоматика ПУ и ТК»
Курсовая работа
по дисциплине
Теория автоматического управления
Структурная схема и управление электроприводом
Выполнил: ст. гр.Ад-41
Сапунов Н.Е.
Ульяновск 2010
Содержание
Описание задания на курсовую работу
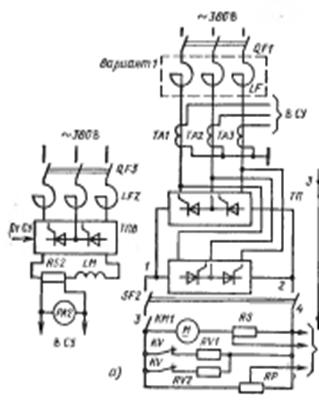
1. Описание САУ переменного тока
2. Статические характеристики САУ переменного тока
2.1 Математическое описание преобразователя частоты (ПЧ) с промежуточным звеном постоянного тока на основе АИН
2.2 Математическое описание асинхронного двигателя при управлении частотой и напряжением статора
2.3 Статические характеристики САУ на основе АД
2.3.1 Статические характеристики САУ при ![]()
2.3.2 Статические характеристики САУ при ![]()
2.3.3 Статические характеристики САУ при вентиляторной нагрузке
3. Динамические характеристики САУ переменного тока
4. Анализ устойчивости САУ
4.1 Критерий устойчивости Гурвица
4.2 Критерий устойчивости Найквиста
4.3 Критерий устойчивости Михайлова
4.4 Построение ЛАЧХ и ФЧХ
5. Расчет переходного процесса
6. Вывод
7. Список литературы
Описание задания на курсовую работу
Целью данной курсовой работы является получение практических навыков по построению структурной схемы для системы «Управляемый выпрямитель - автономный инвертор напряжения – асинхронный двигатель», и ее дальнейшее упрощение с целью получения передаточной функции по управляющему воздействию (Δxf и Δxu). Проверка системы автоматического управления с помощью критериев устойчивости. И построение графиков переходного процесса.
Исходные данные:
САУ переменного тока. Настройка на симметричный оптимум.
| Uф.с.м, В | nc, об/мин | rc, Ом | xc, Ом | rp’, Ом | xp’, Ом |
| 220 | 875 | 3,6 | 2,58 | 5,7 | 2,63 |
1. Описание САУ переменного тока
Развитие полупроводниковой преобразовательной техники привело к широкому использованию электроприводов с электродвигателями переменного тока, к созданию новых систем управления этими электродвигателями. По сравнению с системами управления электроприводами постоянного тока системы управления электроприводами переменного тока значительно более разнообразны. В регулируемых электроприводах используются асинхронные электродвигатели с короткозамкнутым или фазным ротором, синхронные и вентильные электродвигатели. Применяются различные способы регулирования скорости электродвигателя путем изменения: напряжения статора, частоты и напряжения статора, частоты и напряжения ротора, добавочного сопротивления в цепи ротора и др. Используется значительно большее число регулируемых координат, чем в электроприводах постоянного тока. Вместе с тем имеются определенные ограничения в использовании того или иного способа управления и созданной на основе этого способа системы управления электродвигателем. Все эти обстоятельства затрудняют формирование общих подходов к синтезу АСУ ЭП переменного тока в такой степени, как это было сделано в АСУ ЭП постоянного тока.
Управление электродвигателями переменного тока осложнено рядом обстоятельств, наиболее существенными из которых являются следующие: 1) момент электродвигателя определяется произведением двух результирующих векторов электромагнитных параметров статора и ротора и является функцией четырех переменных; 2) имеется сильное взаимодействие намагничивающих сил статора и ротора, взаимное состояние которых непрерывно меняется при вращении ротора; 3) с целью лучшего использования двигателя в различных режимах его работы возникает задача регулирования магнитного потока двигателя.
Электродвигатели переменного тока совместно с управляемыми преобразователями представляют собой сложные многосвязные нелинейные объекты управления. Полное математическое описание таких объектов оказывается довольно громоздким и неприменимым для инженерных методов синтеза систем управления. Вместе с тем в практике построения систем электроприводов, включая и АСУ ЭП переменного тока, получили распространение простые приемы синтеза систем управления, основанные на принципах подчиненного управления и на использовании унифицированных настроек контуров регулирования, входящих в систему управления. Использование этих приемов позволяет не только просто выполнить синтез систем управления, но и создает обоснованную возможность упрощения математического описания электроприводов переменного тока, в частности возможность пренебрежения взаимосвязью ряда координат и параметров электроприводов.
Основная сложность при создании АСУ ЭП переменного тока заключается в создании независимого управления электромагнитным моментом и потоком двигателя. Если это удается выполнить, то АСУ ЭП переменного тока с обратными связями по скорости или по положению выполняются точно так же, как и АСУ ЭП постоянного тока, включая и способы управления пусковыми и тормозными режимами.
При синтезе взаимосвязанных систем управления используются два основных приема, обеспечивающих автономность (независимость) контуров регулирования: а) использование различного рода дополнительных компенсационных связей между локальными контурами регулирования; б) разделение локальных контуров регулирования по быстродействию. Оба этих приема используются при выполнении АСУ ЭП переменного тока, и это дает основание уже на стадии формирования математической модели электропривода делать ряд упрощений.
Похожие работы
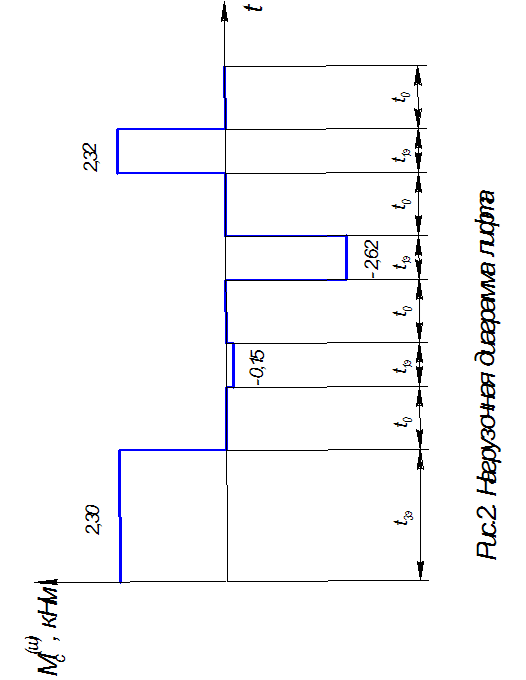
... числа редуктора Расчет передаточного числа редуктора выполняется так, чтобы максимальной скорости рабочего органа механизма соответствовала номинальная скорость двигателя. Для привода грузового лифта: Расчет и построение нагрузочной диаграммы двигателя Для проверки предварительно выбранного двигателя по нагреву выполним построение упрощенной нагрузочной диаграммы двигателя (т.е. ...
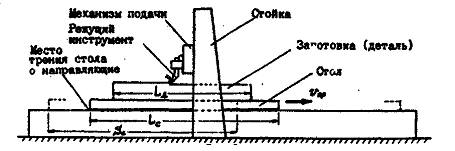
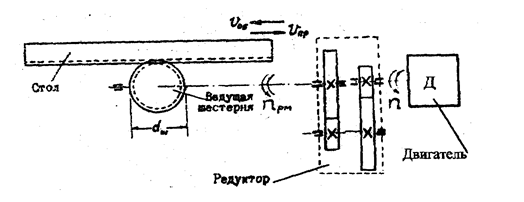
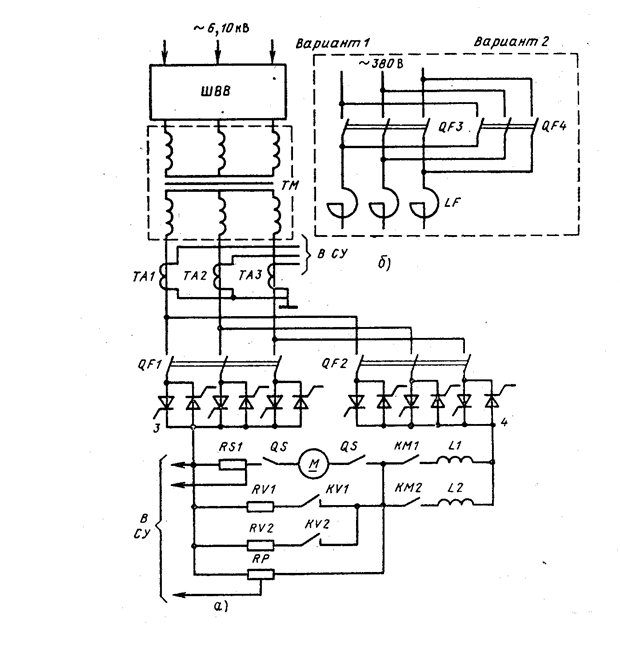
... силовой преобразовательный агрегат, силовой трансформатор и реакторы, выполнить расчет элементов системы автоматического управления электроприводом, выполнить компьютерное моделирование системы автоматизированного электропривода в типовых режимах. Требования к электроприводу: 1. Обеспечение работы механизма по следующему циклу: • подход детали к резцу с пониженной скоростью; • ...
... о выборе лучшего варианта привода принимается на основе сопоставления приведенных затрат на одинаковый объем выпускаемой продукции. В данном проекте необходимо обеспечить регулирование продолжительности времени выпечки с коррекцией по температуре во второй зоне пекарной камеры. При этом необходимо учитывать, что производительность печи при замене системы привода меняться не должна, а также ...
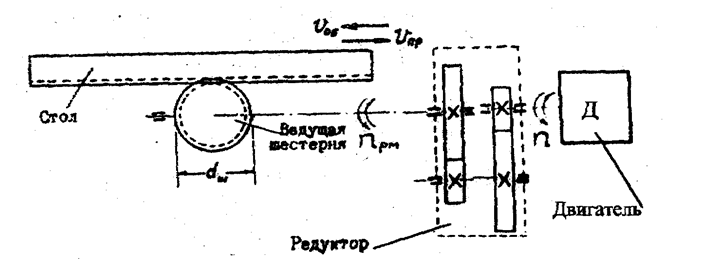
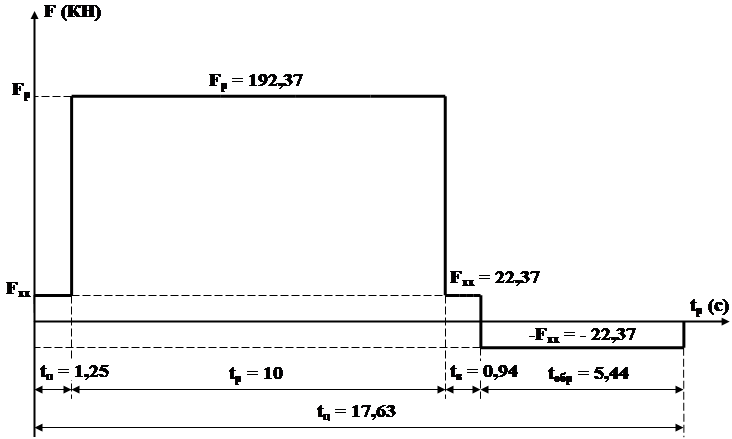
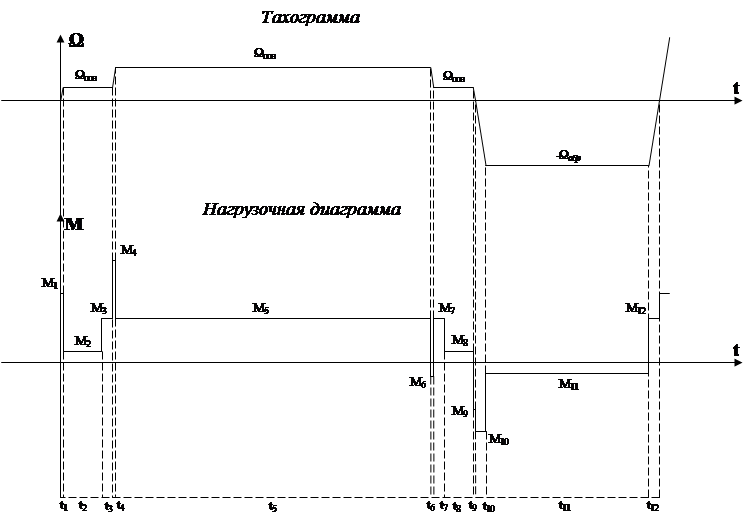
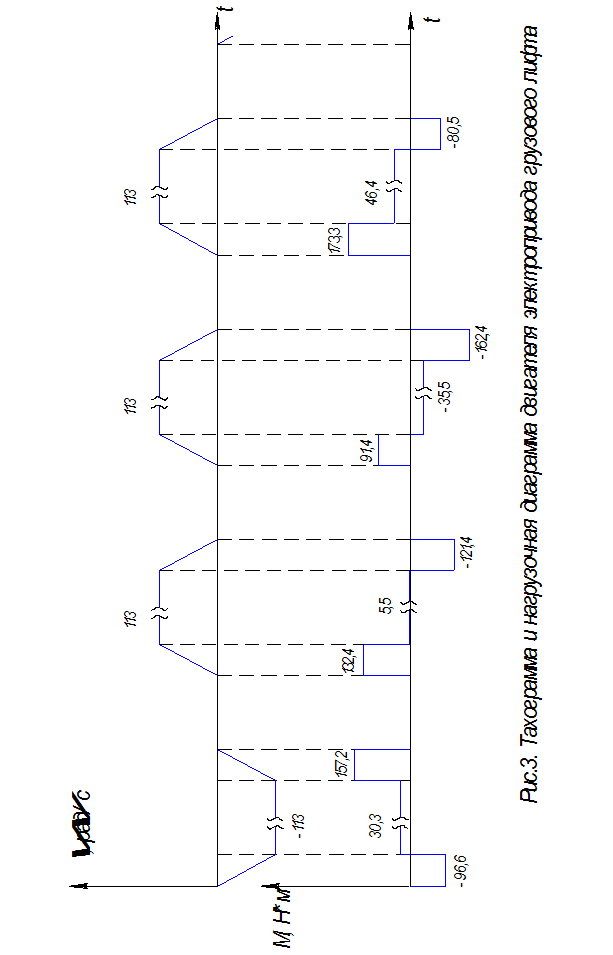
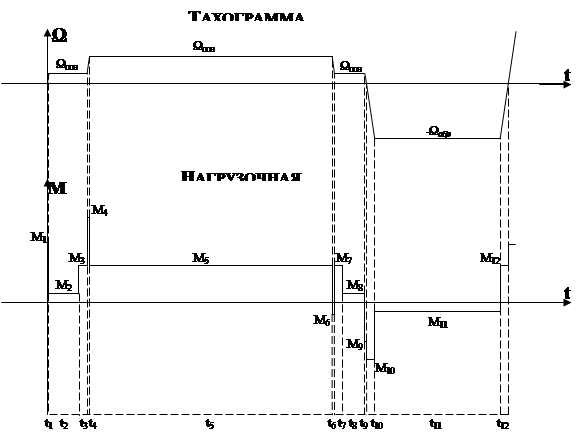
... , пройденный столом на интервале 11: Продолжительность интервала 11: Момент двигателя на интервале 5: Рисунок 4 Тахограмма и нагрузочная диаграмма электропривода механизма перемещения стола продольно-строгального станка. Нагрузочная диаграмма и тахограмма двигателя представлены на рисунке 4: 3.4 Проверка двигателя по нагреву Для проверки двигателя по ...
0 комментариев