Навигация
Устройство контроля позиционирования исполнительного механизма
10058
знаков
0
таблиц
10
изображений
Содержание
Введение
1.Анализ поставленной задачи
2. Проектирование принципиальной схемы устройства
2.1 Схема включения микропроцессора
2.2 Формирование тактовых импульсов
2.3 Схема сброса
2.4 Схемы входных и выходных устройств
2.5 Схема стабилизатора напряжения
3. Проектирование программного обеспечения микропроцессора
4. Листинг программы
5. Рекомендации по разработке программных и аппаратных диагностических средств для проверки работоспособности устройства
6. Проектирование печатной платы устройства (PCad, OrCad)
Заключение
Приложение
Введение
В настоящее время встроенные компьютерные системы получают все большее распространение из-за их высокого качества и надежности, а так же простоты обработки информации.
Микроконтроллеры являются сердцем многих современных устройств и приборов, в том числе и бытовых. Главной особенностью микроконтроллеров является то, что с их помощью легче и зачастую гораздо дешевле реализовать различные схемы.
Популярность микроконтроллеров AVR постоянно увеличивается. Не последнюю роль в этом играет соотношение показателей «цена — быстродействие — энергопотребление», являющееся одним из лучших на рынке 8-разрядных микроконтроллеров. Также постоянно растет число выпускаемых разнообразных программных и аппаратных средств поддержки разработок устройств на их основе.
В данном курсовом проекте на базе микроконтроллеров AVR необходимо разработать устройство, которое позволит управлять скоростью вращения исполнительного механизма, отслеживать перемещение любой точки на его поверхности в каждый момент времени и передавать данные об этом последовательный порт компьютера.
1. Анализ поставленной задачи
Темой курсового проекта является «Устройство контроля позиционирования исполнительного механизма». Данное устройство предназначено для наблюдения за работой исполнительного механизма, задания скорости его вращения, контроля позиционирования (т. е. сравнения его текущего местоположения с заданным), а также выдачи информации в последовательный порт компьютера.
Устройство состоит из следующих блоков:
• блок датчиков;
• устройство управления;
• блок передачи информации.
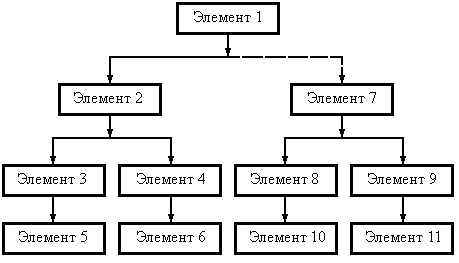
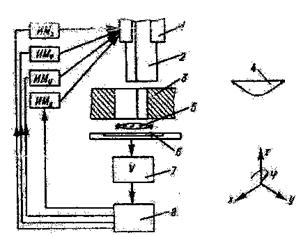
Структурная схема устройства представлена на рис. 1.
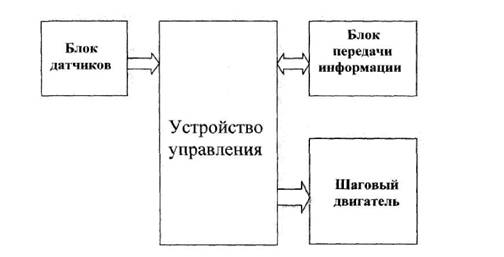
Рис. 1 Структурная схема устройства
Блок датчиков представляет собой два датчика на фототранзисторах, один из которых регистрирует прохождение метки на исполнительном механизме, что заставляет работать второй датчик - он регистрирует прохождение тёмных и светлых участков на ИМ.
Блок передачи информации реализован на микросхеме МАХ232. Устройство управления организовано на микроконтроллере семейства Classic AT90S2313-10. Данный микроконтроллер имеет память программ 2 Кбайт, ОЗУ 128 байт и EEPROM-память данных 128 байт. Максимальное количество контактов ввода/вывода 15.
Т.к. для подключения датчиков необходимо 2 контакта, для подключения шагового двигателя - 4 контакта и семейство AVR имеет последовательный аппаратный интерфейс, то ресурсов этого микроконтроллера достаточно для реализации проекта.
2. Проектирование принципиальной схемы устройства
2.1 Схема включения микропроцессора
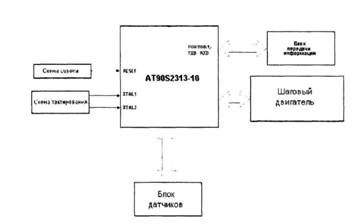
Рисунок 2,1 - Схема включения микропроцессора
2.2 Формирование тактовых импульсов
Формирование тактовых импульсов производится при помощи внешнего кварцевого резонатора. Такой вариант включения необходим для обеспечения высокой точности и стабильности рабочей частоты.
Схема включения показана на рис. 2.2.
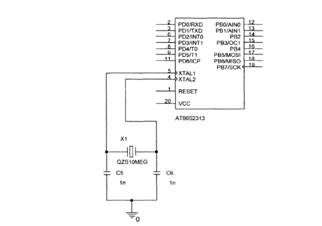
Рисунок 2.2 - Подключение кварцевого резонатора.
2.3 Схема сброса
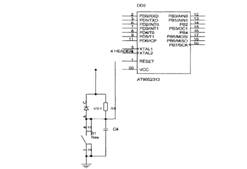
Рисунок 2.3 - Схема сброса
Для осуществления сброса микроконтроллера при включении питания, а также по кнопке используется схема, представленная на рис 2.3.
2.4 Схема стабилизатора напряжения
Для стабилизации напряжения питания схемы используется интегральный стабилизатор LM 7805.
Входное напряжение В. Min - 7.5;
Мах- 35; Максимальный выходной ток, А - 0.5;
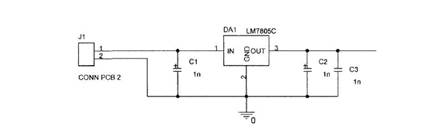
Рисунок 2.4 - Схема стабилизатора напряжения
2.5 Схема входных и выходных устройств
Входными устройствами являются:
• два датчика на фототранзисторах;
• один сигнальный провод внешнего устройства управления. Выходные устройства:
• шаговый двигатель;
• RS-232.
Датчики, сигнальный провод и шаговый двигатель подключены на плату с помощью разъёмов.
Интерфейс RS-232 реализован на микросхеме МАХ 232. Они содержат в себе преобразователь уровня, что позволяет обойтись без дополнительного преобразователя напряжения
Схема её подключения представлена на рис. 2.5
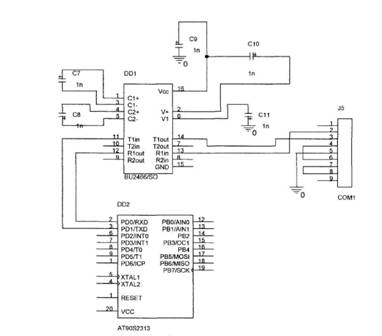
Рисунок 2.5 - Схема включения последовательного интерфейса
Похожие работы
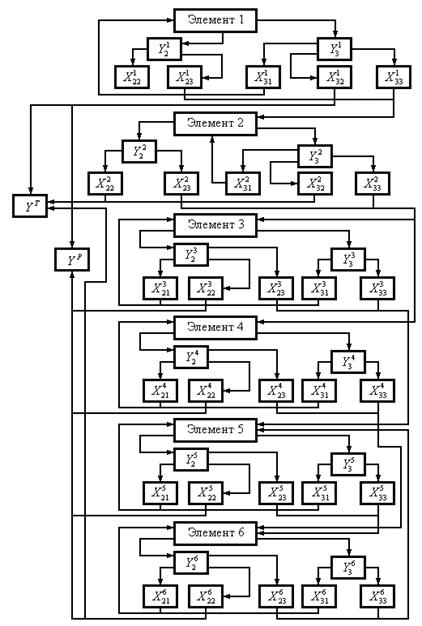
... , , . Произведем оценку числа возможных вариантов, которые можно синтезировать на основе морфологической матрицы при наложении на нее граничных условий проектирования, а именно исключения вышеперечисленных вариантов: Для всего PC машины поточной линии прядильного производства оценка полных решений может быть проведена по следующей формуле: , где – количество исполнительных механизмов в ...

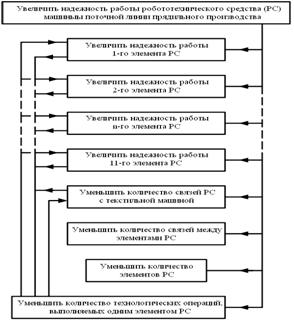
... функциональных возможностей; - улучшение эргономических качеств; - улучшение эстетических качеств; - повышение чувствительности, точности, стабильности, диапазона. Цели и задачи автоматизации производственных систем Автоматизация - это совокупность организационно-технических мероприятий, обеспечивающих замену физического и умственного труда человека, затрачиваемого на планирование, ...


... среды; В проекте используются следующие САР (Системы автоматического регулирования): 1 САР расхода флегмы в колонны 3 и 8; 2 САР расхода продукта, подаваемого в колонну 8; 4. Выбор и обоснование технических средств регулирования, контроля, защиты и блокировки Для измерения давления продукта в верхней части колонн 3 и 8 выбираем: Для контроля давления в нижней и верхней части колонн ...
... соединение сопрягаемых деталей, так как устраняется трение. Все рассмотренные устройства относительного ориентирования могут быть использованы при разработке адаптивных сборочных РТК. 10. Типовые РТК сборки Экспериментальный сборочный РТК на базе ПР мод. РВ - 50Ф2 (рис. 2.12), созданный в ЭНИМСе, обеспечивает автоматическую сборку подшипниковой опоры комбайна. Собираемый узел состоит из ...
0 комментариев