Навигация
Устройство управления системой измерения веса
22919
знаков
11
таблиц
6
изображений
Введение
В настоящее время встроенные компьютерные системы получают все большее распространение из-за их высокого качества и надежности, а так же простоты обработки информации.
Микроконтроллеры являются ядром многих современных устройств и приборов, в том числе и бытовых. Главной особенностью микроконтроллеров является то, что с их помощью легче и зачастую гораздо дешевле реализовать различные схемы.
Одними из самых популярных микроконтроллеров на сегодняшний день являются микроконтроллеры фирмы Atmel. Они основаны на новой RISC-архитектуре, которая была разработана с использованием достижений полупроводниковой микроэлектроники и возможностей программного обеспечения 1990-х годов. Созданные в результате микроконтроллеры имеют самое высокое соотношение производительность/потребление энергии, доступное на рынке 8-разрядных микроконтроллеров.
Языки программирования высокого уровня быстро становятся стандартным методом программирования для встроенных микроконтроллеров из-за уменьшения времени разработки и упрощенной поддержки сопровождения. Архитектура микроконтроллеров фирмы Atmel была разработана совместно с экспертами языка Си, чтобы гарантировать, что аппаратные средства и программное обеспечивают получение высокоэффективного кода.
В данном курсовом проекте разрабатывается устройство управления системой измерения веса, построенном на микроконтроллере ATmega16 фирмы Atmel.
1. Анализ поставленной задачи
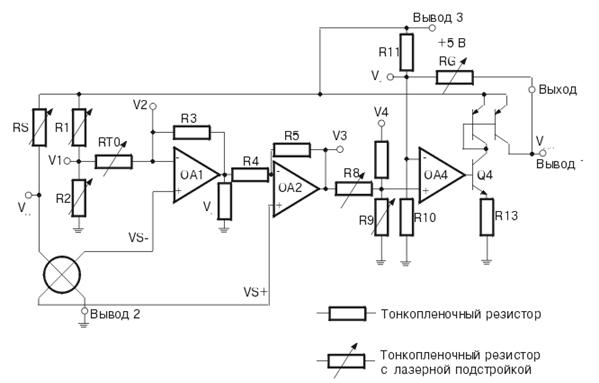
Система измерения веса построена на весовом индикаторе WE2108, который является измерительным усилителем для подключения 4х датчиков веса. Сигнал датчиков веса усиливается и преобразуется прибором в цифровую форму и отображается на встроенном дисплее. Управление системой в целом осуществляется микроконтроллером ATmega16, который принимает от WE2108 сигнал превышения заданного уровня срабатывания и выдает соответствующие сигналы управления задвижками бункера и транспортером.
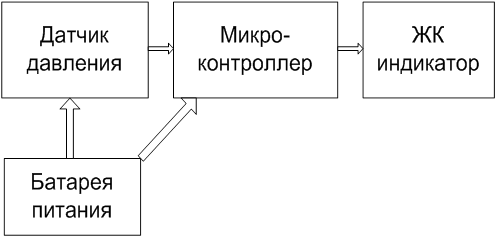
Структурная схема системы приведена на рисунке 1.1.
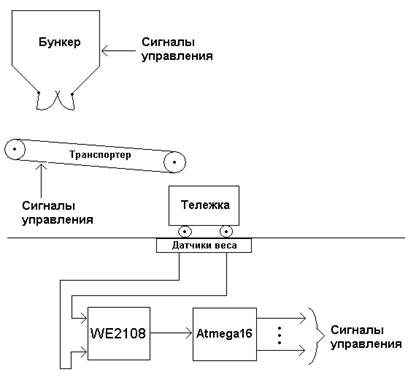
Рисунок 1.1 - Структурная схема системы
Работа системы заключается в следующем: в бункере находится груз (например, песок), который необходимо отсыпать дозированными порциями. Тележка заезжает на платформу, на которой установлены весовые датчики. Прибор WE2108 позволяет задать функцию тарирования, при выполнении которой запоминается текущее значение массы тележки и это значение вычитается из последующих значений веса. Т.е., если платформа с весовыми датчиками нагружена только пустой тележкой, то прибор показывает нулевое значение. При нажатии кнопки Пуск микроконтроллер ATmega16 выдает сигнал включения транспортера, а после выдержки времени в 5 секунд на открытие бункера. Тележка начинает наполняться грузом. Как только вес тележки с грузом достигнет заданного, WE2108 выдает сигнал о превышении установленного веса. ATmega16 получает этот сигнал, закрывает бункер и после выдержки времени в 5 секунд останавливает транспортер.
Предложенный для решения задачи микроконтроллер ATmega16 обладает следующими характеристиками:
• напряжение питания+5 V
• размер памяти программ 16 К
• размер EEPROM512 В
• размер внутренней SRAM 1 К
• порты ввода/вывода4x8 bit
• четыре таймера счетчика
• программируемый последовательный УСАПП
Этих свойств микроконтроллера вполне достаточно для обеспечения управления задвижками бункера и временем работы транспортера.
2. Проектирование принципиальной схемы устройства
2.1 Схема включения микроконтроллера
Микроконтроллер AVR типа ATmega16 имеет напряжение питания +5 V, которое подводится к выводу VCC. Так как питание всего нашего устройства +10 V, то питание к микроконтроллеру должно подводится через понижающий импульсный стабилизатор. Кроме этого, микроконтроллер имеет еще два вывода для питания порта А (или АЦП), один из которых (AVCC) должен быть подключен к напряжению питания даже если порт А не используется. Если используется АЦП, то это питание должно подключатся через фильтр низких частот. Второй вывод (AREF) используется для подачи напряжения смещения на АЦП.
В нашем устройстве АЦП не используется, поэтому к выводам VCC и AVCC можно подключить предварительно стабилизированное питание +5 V от стабилизатора, а вывод AREF подключить к общей шине земли.
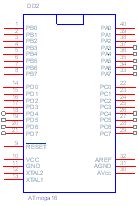
Рис.2.1 – Условное обозначение ATmega16
2.2 Формирование тактовых импульсов
Тактовые импульсы для работы микроконтроллера можно формировать с помощью либо встроенного генератора импульсов, либо подключая внешний генератор. Внешний генератор в данном случае не является приемлемым выбором, так как для получения импульсов заданной частоты для него нужна отдельная схема деления. Внутренний генератор, хотя и обладает меньшей стабильностью, по сравнению с внешним генератором (но стабильность можно повысить, подключив кварцевый резонатор), имеет встроенный делитель тактовой частоты. Предварительный делитель позволяет делить тактовую частоту на 8, 64, 256 и 1024. Выбор коэффициента деления тактовой частоты задается битами CS02, CS01, CS00 регистра управления т/сч0 TCCR0 или битами CS12, CS11, CS10 регистра управления т/сч1. Для данной схемы выбран коэффициент деления 1024, обеспечивающий максимальную задержку.
Похожие работы
... плана ФЭ. Большое разнообразие моделей РК приводит к необходимости использования разнообразных способов и технических средств для измерения их параметров. Как правило, статические и динамические параметры РК измеряют на разных технологических установках. Методы построения средств измерения для идентификации моделей РК могут быть сведены к следующим принципам, учитывающим особенности подключения ...
... —к «массе». Качество отработки элементов вождения по трудным грунтам зависит от наличия и состояния цепей противоскольжения, трековых дорожек, матов и средств самовытаскивания 4. РАЗРАБОТКА КОНСТРУКЦИИ ДУБЛИРУЮЩЕГО УСТРОЙСТВА УПРАВЛЕНИЯ 4.1. ОПРЕДЕЛЕНИЕ РАСЧЕТНОЙ НАГРУЗКИ НА ВАЛ, ВОЗВРАТНЫЕ ПРУЖИНЫ И ПЕДАЛИ. Номинальное усилие на дополнительные педали тормоза и сцепления будет находиться в ...
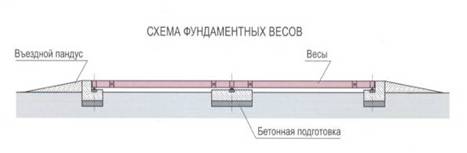


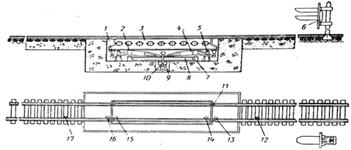
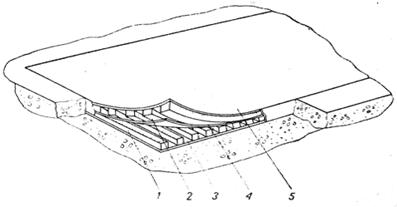
... , что позволяет осуществлять монтаж этих весов без использования большегрузных кранов. Платформы могут быть снабжены ограничительными барьерами для предотвращения случайного съезда автотранспорта с весов. В автомобильных колейных весах может быть предусмотрен доступ для очистки конструктивных засоров без демонтажа весовой платформы [5, с. 11]. Также важным является то, что колейные автомобильные ...


... их на соответствующий порт, также необходимо вывести десятичную точку P2.7. Заключение В результате проделанной работы были разработаны электронные весы с диапазоном измерения от 0 до 250 килограмм, с точностью измерения 500 грамм, с микропроцессорным управлением. Точность измерения не зависит от положения объекта на весах. Габаритные размеры весов 5000x5000 мм. Электронные весы работают от ...
0 комментариев