Электромеханическая связь электропривода и ее характеристики
Линейные преобразования уравнений механической характеристики обобщенной машины
Фазные преобразования переменных
Структура и характеристики линеаризованного электромеханического преобразователя
Режимы преобразования энергии и ограничения, накладываемые на их протекание
Навигация
Математическое описание динамических процессов электромеханического преобразования энергии
Математическое описание динамических процессов электромеханического преобразования энергии
45518
знаков
0
таблиц
27
изображений
Математическое описание динамических процессов электромеханического преобразования энергии
1. Общие сведения
В структуре электромеханической системы, представленной на рис.В.2, электромеханический преобразователь ЭМП является функциональным звеном, осуществляющим электромеханическое преобразование энергии. Его физические свойства определяют регулировочные возможности, рациональные способы управления и энергетические показатели электропривода. Поэтому в данном курсе изучению свойств электромеханических преобразователей различного типа уделяется значительное внимание. Основой для углубленного анализа их характеристик, режимов работы и особенностей взаимодействия с другими элементами электромеханической системы являются изученные в курсе электрических машин принципы действия, типы и конструкции двигателей. При этом на первый план выдвигаются вопросы динамики процессов электромеханического преобразования энергии.
Целью данной главы является закрепление полученных в предшествующих курсах навыков составления дифференциальных уравнений, описывающих динамические электромагнитные процессы, и обучение на этой основе обобщенным приемам составления математического описания процессов электромеханического преобразования энергии, используемым во всем последующем изложении. Эти методы и приемы, разработанные в теории обобщенной электрической машины здесь адаптированы по содержанию и форме к потребностям курса. Необходимо освоить их исходные позиции и научиться практическому использованию наиболее употребительных форм записи уравнений. Важно также правильно понять и усвоить смысл и практическое значение характеристик двигателей, используемых в теории электропривода при изучении их электромеханических свойств.
Таким образом, данная глава является вспомогательной. В ней подготавливается математическая база для анализа физических свойств двигателей в разомкнутых и замкнутых системах электропривода. Перед изучением материалов главы нужно проверить знание дифференциальных уравнений электрического равновесия, общего уравнения электромагнитного момента машины, понятия индуктивностей, взаимных индуктивностей, потокосцеплений обмоток машин и т.п. и при необходимости восстановить в памяти их запись.
2. Обобщенная электрическая машина
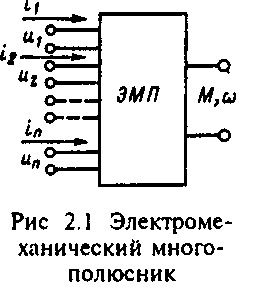
Электромеханический преобразователь в структуре электропривода (см. рис..2) представляет собой идеализированный двигатель, ротор которого не обладает механической инерцией, не подвержен воздействию момента механических потерь и жестко связан с реальным ротором, входящим в состав механической части электропривода. Этому условию соответствует представление двигателя в виде электромеханического многополюсника, показанного на рис..1. Здесь электромеханический преобразователь ЭМП имеет п пар электрических выводов, соответствующих я обмоткам двигателя, и одну пару механических выводов, на которых в результате электромеханического преобразования энергии при скорости развивается электромагнитный момент двигателя М.
Приложенные к обмоткам напряжения u1, u2, ... un связывают электромеханический преобразователь с системой управления электроприводом. Электромагнитный момент М является выходной величиной ЭМП и входной для механической части электропривода. Скорость ротора определяется условиями движения механической части, но при изучении процессов электромеханического преобразования энергии может рассматриваться как независимая переменная. Таким образом, механические переменные и М связывают электромеханический преобразователь с механической частью в единую взаимодействующую систему. Как правило, двигатели являются многофазными электрическими машинами. Это обстоятельство осложняет математическое описание динамических процессов, так как с увеличением числа фаз возрастает число уравнений электрического равновесия и усложняются электромагнитные связи. Поэтому во всех случаях, когда это возможно, стремятся сводить анализ процессов в многофазной машине к анализу тех же процессов в эквивалентной двухфазной модели этой машины.
В теории электрических машин доказано, что любая многофазная электрическая машина с n-фазной обмоткой статора и m-фазной обмоткой ротора при условии равенства полных сопротивлений фаз статора (ротора) в динамике может быть представлена двухфазной моделью. Возможность такой замены создает условия для получения обобщенного математического описания процессов электромеханического преобразования энергии во вращающейся электрической машине на основе рассмотрения идеализированного двухфазного электромеханического преобразователя. В специальной литературе такой преобразователь получил название обобщенной электрической машины.
Обобщенная электрическая машина является упрощенной моделью реальной машины. В реальной машине обмотки уложены в пазах статора и ротора, а это вызывает несинусоидальность МДС обмоток, с одной стороны, и неравномерность воздушного зазора - с другой. В обобщенной машине сосредоточенные в пазах проводники с током заменяются синусоидальными токовыми слоями, эквивалентными по МДС первым гармоникам МДС соответствующих реальных обмоток, а неравномерность зазора, обусловленная пазами, не учитывается. При анализе динамических процессов в обобщенной электрической машине, кроме того, принимается, что магнитная цепь машины не насыщается и имеет очень высокую магнитную проницаемость. Зазор явнопо-люсной машины принимается равномерным, а влияние явнопо-люсности учитывается введением переменной радиальной магнитной проницаемости:
![]()
где эл=pп и - соответственно электрический и геометрический угол поворота ротора относительно статора, рад; рп - число пар полюсов машины.
Как было отмечено, условием возможности приведения многофазной машины к эквивалентной двухфазной является ее симметрия, поэтому полные сопротивления обмоток фаз статора и ротора обобщенной машины равны. Напряжения питания могут быть несимметричными, при этом для анализа динамики следует пользоваться известным методом симметричных составляющих.
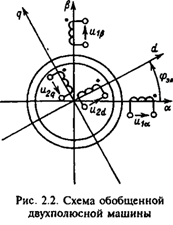
Здесь принимается система обозначений, которая используется во всем последующем изложении курса. Принадлежность переменной той или иной обмотке определяется индексами, которыми обозначены оси, связанные с обмотками обобщенной машины, с указанием отношения к статору (1) или ротору (2), как показано на рис.2.2. На этом рисунке система координат, жестко связанная с неподвижным статором, обозначена ,, с ротором - d, q.
Динамика обобщенной машины описывается четырьмя уравнениями электрического равновесия в цепях ее обмоток и уравнением электромеханического преобразования энергии, которое выражает электромагнитный момент машины М как функцию электрических и механических координат системы.
Уравнения Кирхгофа, выраженные через потокосцепления , имеют вид
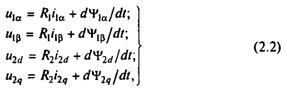
где R1 и R2 - активное сопротивление фазы статора и приведенное активное сопротивление фазы ротора машины.
Уравнения (2.2) однотипны, и их можно записать в обобщенной форме:
![]()
где индекс i принимает значения 1а, 1, 2d, 2q, соответствующие осям, с которыми связаны обмотки.
Потокосцепление каждой обмотки в общем виде определяется результирующим действием токов всех обмоток машины:
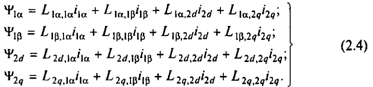
В системе уравнений (2.4) для собственных и взаимных индуктивностей обмоток принято одинаковое обозначение L с подстрочным индексом, первая часть которого i=1,1,2d, 2q указывает, в какой обмотке наводится ЭДС, а вторая j=1, 1, 2d, 2q - током какой обмотки она создается. Например, L11 - собственная индуктивность фазы статора;
Принятые в системе (2.4) обозначения и индексы обеспечивают однотипность всех уравнений, что позволяет прибегнуть к удобной для дальнейшего изложения обобщенной форме записи этой системы:

При работе машины взаимное положение обмоток статора и ротора изменяется, поэтому собственные и взаимные индуктивности обмоток в общем случае являются функцией электрического угла поворота ротора L=f(эл). Для симметричной неявно-полюсной машины собственные индуктивности обмоток статора и ротора не зависят от положения ротора:

L11=L11=L1=const; L2d2d=L2d =L2=const, а взаимные индуктивности между обмотками статора или ротора равны нулю: L1a1=L11=L22d=L22q=0, так как магнитные оси этих обмоток сдвинуты в пространстве относительно друг друга на угол эл=90°. Взаимные индуктивности обмоток статора и ротора проходят полный цикл изменений при повороте ротора на угол фэл=2a, поэтому с учетом принятых на рис.2.2 направлений токов и знака угла поворота ротора можно записать
Для явнополюсной машины в соответствии с принятым выше условием (2.1) собственные и взаимные индуктивности обмоток необходимо представить в виде суммы двух составляющих, одна из которых пропорциональна , а вторая .. Составляющие, пропорциональные , не имеют отличий от рассмотренных для неявнополюсной машины. Составляющие, пропорциональные , имеют полный цикл изменения при повороте ротора на одно полюсное деление. Так как ротор предполагается гладким, то собственные индуктивности явнополюсного статора не зависят от положения ротора, а собственные индуктивности ротора изменяются в соответствии с изменениями . При явнополюсном статоре взаимная индуктивность между обмотками ротора не равна нулю и также определяется изменениями .
Изложенным положениям соответствуют следующие выражения для индуктивностей обобщенной явнополюсной машины:
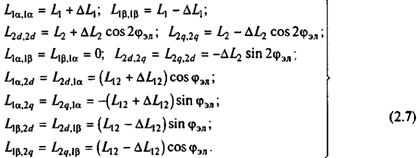
С учетом (2.5) уравнения электрического равновесия (2.3) можно представить в виде

где L определяются (2.6) или (2.7).
Дифференциальное уравнение электромеханического преобразования энергии получим, воспользовавшись известной формулой [8]:

С помощью (2.5) электромагнитный момент машины (2.9) может быть выражен через токи обмоток:

Уравнение электромагнитного момента для неявнополюсной машины можно получить, подставив в (2.10) выражения дня собственных и взаимных индуктивностей обмоток (2.6):
![]()
Аналогично может быть получено с помощью (2.7) и уравнение электромагнитного момента явнополюсной машины.
Похожие работы
... влияния неодновременного включения блоков конденсаторных батарей. При этом рассматривался процесс обжима трубчатых заготовок из алюминиевого сплава АМг2М диаметром 27 мм, 57 мм, 87 мм и толщиной 1,2 мм одновитковым, четырехвитковым цилиндрическим, индуктором-концентратором. Рассматривалось пять типов магнитно-импульсных установок основные характеристики, которых приведены в табл.5.1. Таблица ...
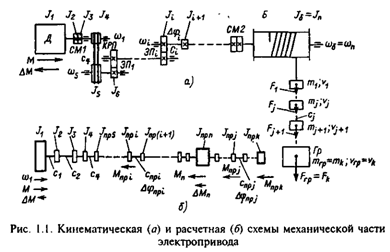




... , кроме электромагнитного момента двигателя. В заключение отметим, что на практике встречаются разветвленные кинематические схемы, которые приводят к разветвленным расчетным схемам механической части Характерным примером являются кинематические схемы многодвигательных электроприводов, в которых двигатели через индивидуальные редукторы воздействуют на общий механизм. 1. Типовые статические ...
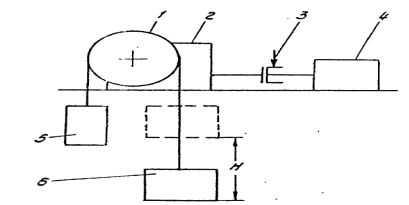
... режим работы, обеспечить выполнение требований по ускорению лифта и возможность его работы с разными грузами на подъем и на спуск. Кинематическая схема электропривода приведена на рисунке 1. Рисунок 1 - Кинематическая схема электропривода грузового лифта:1 – канатоведущий шкив; 2 –редуктор; 3 – тормозной шкив; 4 – двигатель; 5 – клеть; 6 – противовес. Технические данные транспортера ( ...
... о выборе лучшего варианта привода принимается на основе сопоставления приведенных затрат на одинаковый объем выпускаемой продукции. В данном проекте необходимо обеспечить регулирование продолжительности времени выпечки с коррекцией по температуре во второй зоне пекарной камеры. При этом необходимо учитывать, что производительность печи при замене системы привода меняться не должна, а также ...
0 комментариев