Визначимо передатні функції розімкненої та замкненої САК відносно вхідної
Побудова логарифмічної частотної характеристики САК та визначення
Для заданого типу вхідної дії розрахунок та побудова графіку усталеної помилки скорегованої САК
Визначення періоду дискретизації імпульсного елемента
Для заданого типу вхідної дії розрахунок та побудова графіку усталеної помилки ДСАК
Навигация
Для заданого типу вхідної дії розрахунок та побудова графіку усталеної помилки скорегованої САК
Одноосьовий гіроскопічний стабілізатор
25465
знаков
1
таблица
21
изображение
3.9 Для заданого типу вхідної дії розрахунок та побудова графіку усталеної помилки скорегованої САК
Дослідимо точність замкнутої системи за передаточною функцією розімкнутої САК. При дослідженні визначимо три коефіцієнти помилок С0, С1, С2, використовуючи передаточну функцію замкнутої системи за похибкою:
Фx(s) = ![]()
Тоді
_![]()
![]()
![]()
![]()
![]()
Тобто С0 = 0, С1 = 0,1333, С2 = - 0,00844.
Побудуємо графіки помилок в усталеному режимі при:
- одиничному ступінчатому сигналі G1(t) = 1 (G1(s) = 1/s) (рис. 11).
![]() - помилка від вхідної керуючої дії.
- помилка від вхідної керуючої дії.
![]() - усталена похибка.
- усталена похибка.
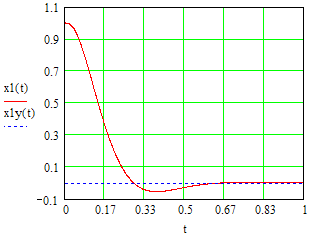
Рис. 11. Графік похибки САК
- при сигналі G2(t) = 100t (рис. 12),
![]() - помилка від вхідної керуючої дії.
- помилка від вхідної керуючої дії.
![]() - усталена похибка.
- усталена похибка.
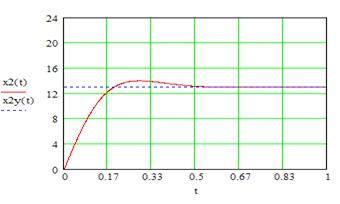
Рис. 12. Графік усталеної похибки САК
3.10 Оцінка якості скорегованої САК
Оцінимо якість перехідних процесів у заданій системі:
- перерегулювання δ – відносне максимальне відхилення перехідної характеристики від усталеного значення вихідної координати, виражене у відсотках:
δ = ![]()
(hmax, hуст – відповідно максимальне та усталене значення перехідної характеристики для досліджуваної системи побачимо на графіку (рис.10))
δ = ![]() .
.
- час регулювання (час перехідного процесу) tp – мінімальний час, після сплину якого регульована координата буде залишатися близькою до усталеного значення із заданою точністю ![]() .
.
![]() , тоді tp = 0,6 (с).
, тоді tp = 0,6 (с).
- число коливань n, яке має перехідна характеристика h(t) за час регулювання tp:
n = 1.
Висновок: приведені вище розрахунки та дослідження показують, що задана система є нестійкою, але її можна скорегувати порівняно нескладними корегуючими пристроями (передаточна функція після корегування має пропорційну, інтегруючу та дві аперіодичні ланки першого порядку), метод розрахунку яких приведений вище; при роботі системи спостерігали усталену похибку САК з заданою вхідною дією, розрахунок провели за допомогою приведених вище формул.
3.11 Моделювання системи в програмному модулі Simulink
Змоделюємо систему в програмному модулі Simulink – зберемо структурну схему отриманої скоректованої системи (рис. 13).
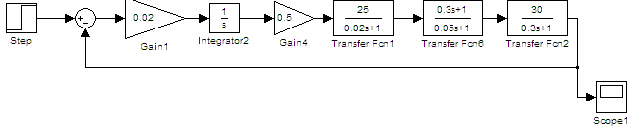
Рис. 13. Модель скоректованої САК в програмному модулі Simulink
1) Реакція системи на одиничний ступінчатий сигнал (рис. 14).
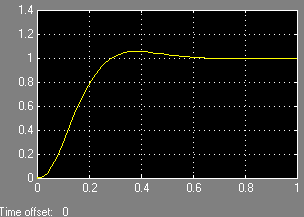
Рис. 14. Реакція системи на одиничний вхідний сигнал
Порівнюючи реакцію САК, отриману за допомогою моделювання (рис. 14), з теоретично отриманою перехідною характеристикою (рис. 10) в пункті 3.8 виявили, що вони співпали (розрахунки в обох випадках проведені правильно).
2) Побудова графіка вихідної координати при заданій вхідній дії
g(t) = 100t (рис. 16).
Змоделюємо систему з заданою вхідною дією в програмному модулі Simulink (рис. 15).

Рис. 15. Модель САК з заданою вхідною дією
Реакція системи на вхідний сигнал (рис. 16).
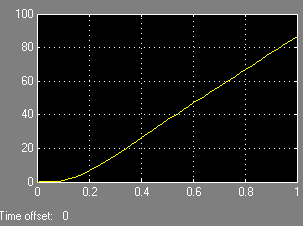
Рис. 16. Реакція САК на задану вхідну дію
З графіків видно, що робота системи залежить від вхідного сигналу.
4 Аналіз дискретної САК (ДСАК)
В основі аналізу дискретної САК візьмемо лінійну неперервну САК після корекції з передаточною характеристикою w(s) = ![]() .
.
Похожие работы
... ї стабілізації різних рухомих об'єктів, в заспокоювача хитавиці корабля, для стабілізації літального апарату та інших, а також для визначення викривлення бурових свердловин, шахт і т.д. 3 Гіроскопи в науці В даний час деякі моделі мобільних телефонів та ігрових контролерів обладнуються датчиками прискорення, так званими акселерометра. Такі датчики дозволяють управляти цими пристроями, зді ...
0 комментариев