Вирощування кристалів
Літографія
Загальні принципи побудови
Структура та принцип дії акселерометра фірми Analog Devices типу ADXL
Особливості монтажу
Обґрунтування системи параметрів виробу і визначення відносних показників якості
Визначення коефіцієнтів вагомості параметрів
Планування виконання науково-дослідних та дослідно-конструкторських робіт
Кошторис витрат на науково-дослідні та дослідно-конструкторські роботи
Витрати на оплату праці
Відрахування на соціальні заходи
Навигация
Загальні принципи побудови
Мікромеханічний акселерометр на рухомому об’єкті
73015
знаков
28
таблиц
34
изображения
4.1. Загальні принципи побудови
|
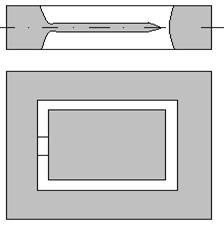
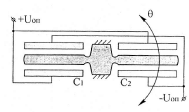
Рис. 13 Принципова схема балочного акселерометра
|
![]()
![]()
![]()
![]() `
`
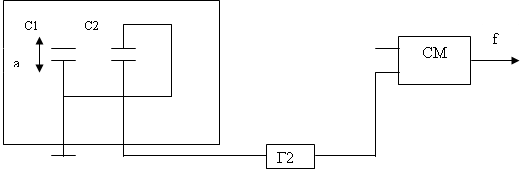
Рис.14 Блок-схема розімкнутого акселерометра з частотним виходом
Номінальний зазор складає 0,039 мм. Маятники складають дві ємності С1 і С2 з електродами, встановленими на корпусі приладу. Обкладки ємностей включені таким чином, що при дії прискорення зазор в одному конденсаторі збільшується а в другому зменшується.
Кожна ємність включена до складу контура генераторів Г1 та Г2. Частота одного генератора зменшується а другого збільшується. Сигнали від кожного генератора складаються за допомогою змішувача ЗМ, а різницева частота цих сигналів і є вихідним сигналом акселерометра. Така схема акселерометра дозволяє виключити додаткові деталі на маятниках і значно спростити конструкцію чутливого елементу.
За вимірюванням різницевих частот двох генераторів можна визначити прискорення. На рис.15 приведена залежність вихідного сигналу акселерометра від величини діючого прискорення.
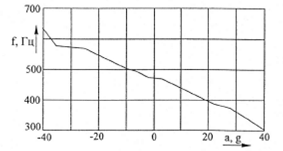
Рис.15. Залежність вихідного сигналу від діючого прискорення
При розробці даного типу акселерометра довелось зіткнутися з цілим рядом проблем: явищем самосинхронізації частот двох генераторів, досить значною залежністю вихідного сигналу акселерометра від величини напруги живлення та температури навколишнього середовища. Для компенсації всіх цих похибок розробниками вводилось алгоритмічна компенсація всіх похибок.
По схемі балочного акселерометра випускаються прилади типу АТ1101 та АТ1105.
|
![]()
| ||||||||||||
| ||||||||||||
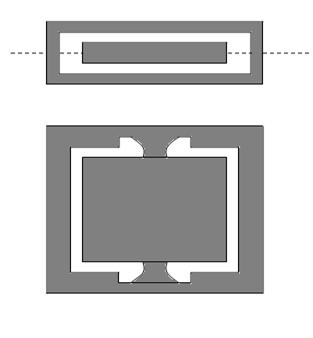
Рис.16. Гібридний акселерометр компенсаційного типу (схема підвісу)
Маятником може слугувати як внутрішня, так і зовнішня пластина. Акселерометр має гібридну конструкцію – датчик моменту контуру зворотнього зв’язку виконаний по традиційній технології і має нерухомий постійний магніт та обмотку на маятнику. На маятнику напилені електроди, які є загальною обкладкою ємнісного датчика переміщень маятника, а два інших електрода напилені на корпусі приладу. Зазор між маятником та електродами на корпусі складає 0,021 мм. Для збільшення маятниковості встановлений груз.
Акселерометр має встрояну електроніку зворотнього зв’язку, виконану на основі гібридно-плівчатої технології. Акселерометри були виготовлені для застосування в керуючих боєприпасах з діапазоном вимірювання від 100g до 100000g а також для комерційних цілей з діапазоном вимірювання прискорень (0,1-1,5)g.
Блок-схема акселерометра наведена на рис.17. Блок-схема складається з задаючого генератора ЗГ, двох підсилювачів У1 та У2, двох випрямлювачів В1 та В2, диференційного підсилювача ДУ, датчика моменту ДМ, та еталонного опору Rе з якого знімається вихідний сигнал.
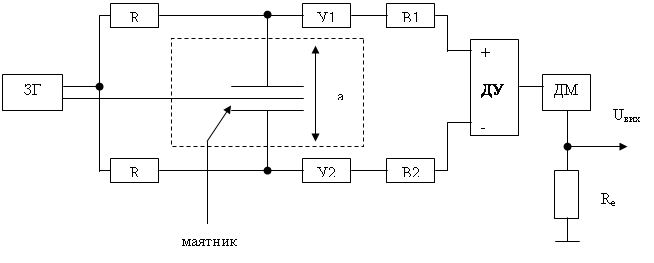
Рис.17. Блок-схема акселерометра
Даний тип акселерометра випускається в декількох модифікаціях (А-12, А-15, А-16), в залежності від конкретного застосування. Ці акселерометри встановлюються в карданні та безкарданні системи.
Основним недоліком описаного приладу є складність конструкції чутливого елементу.
Акселерометр з встрояною електронікою витримує удари до 50g та має наступні характеристики:
- діапазон вимірювальних прискорень ![]() ;
;
- масштабний коефіцієнт ![]() ;
;
- нестабільність масштабного коефіцієнта ![]() ;
;
- дрейф нульового сигналу на протязі однієї години ![]() ;
;
- дрейф нульового сигналу за час більше однієї години ![]() ;
;
- поріг чутливості ![]() ;
;
- маса акселерометра ![]() ;
;
Є також варіант конструкції акселерометра прямого вимірювання з підвісом маятника по схемі рис.16, показаний на рис.18 [5].
|
| ||||||||||||||||
 | |||||||||||||||||
 | |||||||||||||||||
| |||||||||||||||||
| |||||||||||||||||
| ||||||
| ||||||
| |||||
Рис.18. Маятник акселерометра: а) схема підвісу; б) підключення електродів датчика переміщення для лінійного акселерометра; в) підключення електродів для кутового акселерометра; 1- нерухома пластина; 2- пружний підвіс; 3- рухомий елемент підвісу (маятник).
Рухома пластина 3 являється маятником, який за допомогою чотирьох пружних перемичок підвісу 2 з’єднаний з базовою пластиною 1. Вся маятникова система може бути виконана з монокристалічного кремнію анізотропним травленням. Торцеві поверхні бази 1 можуть бути з’єднані зі скляними боросілікатними кришками, наприклад, електростатичною зваркою. Рухома пластина є одночасно центральним електродом ємнісного датчика переміщень.
Похожие работы
... ї стабілізації різних рухомих об'єктів, в заспокоювача хитавиці корабля, для стабілізації літального апарату та інших, а також для визначення викривлення бурових свердловин, шахт і т.д. 3 Гіроскопи в науці В даний час деякі моделі мобільних телефонів та ігрових контролерів обладнуються датчиками прискорення, так званими акселерометра. Такі датчики дозволяють управляти цими пристроями, зді ...
0 комментариев