Навигация
Цифровой сглаживающий фильтр
29613
знаков
4
таблицы
3
изображения
Пояснительная записка
к курсовой работе по дисциплине
«Цифровые устройства и микропроцессоры»
Студент Ксендзов А. В.
Группа 712 специальности 2007
2001
Введение
С внедрением в промышленность цифровых технологий появилась возможность строить устройства обработки оцифрованных сигналов вычислительным методом. Такой способ обладает рядом важных преимуществ, таких как повышенная точность обработки, меньшая зависимость параметров от внешних условий, а также возможность реализации таких обрабатывающих устройств, которые невозможно или трудно было реализовать в аналоговом виде. К таким устройствам относятся и цифровые фильтры, для которых стало возможным построение разнообразных частотных характеристик путем их аналитической задачи. При этом реализуемы и фильтры традиционных типов: нижних частот, верхних частот, полосовые и режекторные.
Сглаживающий фильтр относится к особому типу фильтров и призван убирать из сигнала импульсные проявления (пики и щелчки), сглаживая их. Импульс имеет широкий (в идеале бесконечный) частотный спектр, однако острота его формы определяется именно высокочастотными составляющими.
По заданию требуется спроектировать цифровой сглаживающий фильтр, используя набор К1821, включающий микропроцессор ВМ85, ПЗУ и порты ввода-вывода на микросхеме РФ55, ОЗУ, таймер счетчик и порты на микросхеме РУ55. Входной сигнал аналоговый, оцифровывается с помощью 10-разрядного АЦП 1108ПВ1, после чего имеет вид отсчетов, следующих через интервал дискретизации. После обработки сигнал в дополнительном цифровом коде должен передаваться в порт ввода-вывода по алгоритму с квитированием. Частота дискретизации FД = 5 кГц, разрядность выходного сигнала 8. Обработка должна происходить в реальном масштабе времени. При проектировании следует придерживаться двух критериев: минимальная аппаратная конфигурация устройства и минимальное время операций обработки сигнала (вычисления). При определенных условиях эти критерии противоречат друг другу.
Фильтр есть линейное устройство, производящее операции над частотным спектром исходного сигнала. Для понимания процесса обработки сигнала в цифровом фильтре полезно знать его основные характеристики. Передаточная функция фильтра, определяющая отношение выходного сигнала к входному при конкретном значении комплексной частоты, по заданию имеет вид:
H(z) = 0.4 (0.1 + 0.65z –1 + z –2 + 0.65z –3 + 0.1z -4 ) (1),
здесь z = e p Tд- характеризует задержку отсчета на время, равное интервалу дискретизации ТД = 1/FД = 0.2 мс. Для данного случая это означает, что амплитуда очередного выходного отсчета равна сумме амплитуд пяти последних входных отсчетов, помноженных на соответствующие коэффициенты. Когда на вход поступает очередной отсчет, по этому правилу сразу вычисляется очередной выходной. По сути это и есть алгоритм работы цифрового фильтра, который требуется спроектировать.
По этому алгоритму, при подаче на вход единственного единичного отсчета фильтр ответит пятью отсчетами, следующими через ТД и имеющими амплитуды, равные соответствующим коэффициентам передаточной функции:
Видно, что высокий острый импульс сглаживается и растягивается во времени.
Если на вход подается последовательность из пяти и более единичных отсчетов, то на выходе будет наблюдаться последовательность нарастающих по амплитуде импульсов, причем каждый последующий больше предыдущего на соответствующий коэффициент, а начиная с пятого все отсчеты имеют единичную амплитуду:

Строго говоря, выражение (1) является аналитическим описанием дискретного режекторного гребенчатого фильтра нерекурсивного типа ( с конечной импульсной характеристикой ).
Гребенчатость фильтра связана со стробоскопическим эффектом при оцифровке сигнала, когда бесконечное множество аналоговых колебаний различных частот имеют одинаковую дискретную реализацию в отсчетах и, следовательно, обрабатываются фильтром одинаково. Но только одно из таких колебаний имеет частоту, меньшую частоты дискретизации, а значит, остальные колебания не отвечают требованию теоремы Котельникова, согласно которой верхняя частота сигнала должна быть как минимум в два раза меньше частоты дискретизации, иначе может произойти потеря информации, закодированной в дискретном сигнале. По заданию, FД = 5 кГц , следовательно, верхняя частота сигнала, а значит, и фильтра составляет

FВ = 2.5 кГц.
1. Анализ и формализация задачи
Согласно техническому заданию и выражению (1), обобщенная структура, описывающая работу фильтра, выглядит следующим образом:
|
|
|
|
|
|
|
|
| |||||||||||||||||||||||||||||
|
|
где xn – входные отсчеты, yn – выходные отсчеты,
z –1 – задержка на ТД , bm и С – коэффициенты.
Как видно, фильтр должен держать в памяти пять отсчетов одновременно и оперировать с ними, производя арифметические операции. С выполнением поставленной задачи может справиться микропроцессорная система, действующая по заданной программе. Она составляет основу цифрового фильтра и включает в себя микропроцессор, оперативную память для хранения отсчетов и постоянную память для хранения кода программы, реализующей алгоритм фильтрации. Согласно заданию, микропроцессорная система строится на основе комплекта К1821, включающего микропроцессор ВМ85, микросхему РФ55 ( ПЗУ и порты ввода-вывода ) и микросхему РУ55 (ОЗУ, таймер-счетчик и порты ввода-вывода ).
Исходный сигнал, который фильтр должен обрабатывать, имеет аналоговую форму, поэтому его необходимо оцифровать. Для этой цели используется аналогово-цифровой преобразователь (АЦП) последовательного приближения 1108ПВ1. Данный АЦП работает с униполярным сигналом от 0 до 3 вольт, поэтому необходимо обеспечить масштабирование и сдвиг на +1.5 В аналогового сигнала, который по заданию изменяется в пределах от -2 до +2 В. Это осуществляется с помощью высокостабильного резистивного делителя и развязывающего повторителя, выполненного на операционном усилителе.
![]()
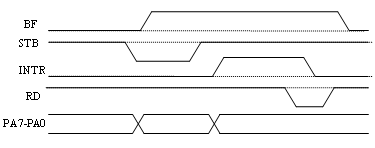
![]() АЦП 110ПВ1 – десятиразрядный, данные выдаются в прямом параллельном коде. Вычисление начинается с отрицательным перепадом тактового импульса (ТИ) при условии низкого уровня на входе запуска ST. в течении первого тактового импульса происходит сброс регистров и установка опорных напряжений на входе внутреннего селектора АЦП. Далее в течении 10 ТИ осуществляется последовательное приближение, и в последнем 12-м ТИ формируется низкоуровневый сигнал RAD, служащий для оповещения внешнего устройства о готовности данных ( присутствии их в выходном буфере). АЦП может работать и в 8-разрядном режиме, если его вход SE10/8 подключен к шине отрицательного источника питания, при этом приближение происходит за 8 ТИ и таким образом, на преобразование затрачивается 10 тактов. Следует заметить, что у данного АЦП может быть внешнее или внутреннее тактирование, в последнем случае частота следования тактовых импульсов определяется величиной конденсатора CCLK , при ССLK = 10 пФ fmax = 27 МГц, tmin = 37 нс, время преобразования tпр= 10tmin = 0.37 мкс, отсюда следует, что максимально возможное время обработки микропроцессором данных tобр= TД – tпр = 200-0.37=199.63 мкс, то есть, время выборки занимает ничтожную часть общего времени ТД, отведенного на получение очередного входного отсчета и вычисление выходного.
АЦП 110ПВ1 – десятиразрядный, данные выдаются в прямом параллельном коде. Вычисление начинается с отрицательным перепадом тактового импульса (ТИ) при условии низкого уровня на входе запуска ST. в течении первого тактового импульса происходит сброс регистров и установка опорных напряжений на входе внутреннего селектора АЦП. Далее в течении 10 ТИ осуществляется последовательное приближение, и в последнем 12-м ТИ формируется низкоуровневый сигнал RAD, служащий для оповещения внешнего устройства о готовности данных ( присутствии их в выходном буфере). АЦП может работать и в 8-разрядном режиме, если его вход SE10/8 подключен к шине отрицательного источника питания, при этом приближение происходит за 8 ТИ и таким образом, на преобразование затрачивается 10 тактов. Следует заметить, что у данного АЦП может быть внешнее или внутреннее тактирование, в последнем случае частота следования тактовых импульсов определяется величиной конденсатора CCLK , при ССLK = 10 пФ fmax = 27 МГц, tmin = 37 нс, время преобразования tпр= 10tmin = 0.37 мкс, отсюда следует, что максимально возможное время обработки микропроцессором данных tобр= TД – tпр = 200-0.37=199.63 мкс, то есть, время выборки занимает ничтожную часть общего времени ТД, отведенного на получение очередного входного отсчета и вычисление выходного.
Однако за малое время tпр сигнал на входе АЦП может меняться, и в результате приближений выходная информация не будет соответствовать действительности. Необходимо, чтобы во время аналогово-цифрового преобразования уровень входного сигнала был постоянен, или хотя бы не изменялся более чем на 0.5h , где h – шаг квантования
Максимальное изменение будет происходить на верхней частоте, равной согласно теореме Котельникова
fв = 0.5 FД = 2.5 кГц. Скорость этого изменения можно рассчитать, взяв производную от испытательного колебания с частотой fв и размахом Uвхmax = 3 B.
S(t) = 3 sin (2p * 2500 t ); S’(t) = 3*2p *2500 cos (2p *2500 t );
Максимальная скорость изменения равна 3*2p*2500 » 47124 В/с.
Du = 47124 * 3.7*10-7 = 17.4 мВ > 5.86 = 0.5h.
Чтобы поддерживать сигнал на входе АЦП постоянным на время преобразования, требуется устройство выборки и хранения (УВХ), которое фиксирует уровень с момента прихода на управляющий вход тактирующего строба и удерживает этот уровень в течении всей его длительности. В простейшем случае УВХ представляет собой аналоговый ключ и емкость хранения:
В настоящее время производятся готовые УВХ в виде микросхем, например, серия К1100. Микросхема К1100СК2 представляет собой УВХ аналогового сигнала, изменяющегося в пределах ±5 В. При подключаемой емкости хранения 1 нФ время выборки не превышает: tвыборки<10 мкс. Скорость изменения выходного напряжения при хранении не более 5 мВ/мс, то есть при использовании УВХ Dumax = 1.85 мВ < 5.86 мВ.
Другая проблема состоит в том, что входной сигнал является биполярным и изменяется в пределах ±2 В, а заданный АЦП требует униполярный сигнал на входе в пределах 0…3 В. То есть необходимо перед подачей входного сигнала на АЦП промасштабировать его на ¾ и поднять постоянную составляющую на 1.5 В. С этой задачей справится аналоговый сумматор на операционном усилителе:
Коэффициент передачи такого сумматора определяется выражением:

Возможен вариант короткого замыкания цепи ОС,
R3 = 0, ROC = ¥. Тогда, если положить, что U1 = UBX , a U2 = Uпит , то очевидно, что коэффициент масштабирования U1 , равный ¾ , можно обеспечить, взяв R1 = 1 кОм, R2 = 3 кОм. Тогда коэффициент при U2 составляет ¼ . Учитывая, что требуемое UСМ = 1.5 В, получаем Uпит = 6 В = ½ Епит = +12 В. То есть, требуемое Uпит можно получить с шины питания с помощью симметричного резистивного делителя, при этом надо исключить влияние делителя на сумматор, поставив между ними повторитель напряжения на операционном усилителе.
Как уже отмечалось, при проникновении на вход АЦП составляющих с частотами, не отвечающими условию теоремы Котельникова, f1 + m FД , m = 1; 2; 3; … , может возникать стробоскопический эффект, выражающийся в перенесении этих составляющих в частотную область, отвечающую данной теореме, f 1 < FД .
Поэтому частота входного сигнала должна отвечать теореме Котельникова. Поскольку в техническом задании не оговариваются частотные свойства входного сигнала, то на входе необходимо поставить аналоговый фильтр с частотой среза, равной ½ FД = 2500 Гц, который подавлял бы высокочастотные составляющие и в какой-то мере устранял бы подобные проявления. В простейшем случае это ФНЧ 1-го порядка – RC-цепь и операционный усилитель.
R<<RBX oy , R = 1 кОм ; С = 1 / (pRFД ) = 63.66 нФ .
Таким образом, аналоговая входная часть проектируемого устройства представляет собой ФНЧ, грубо ограничивающий спектр сигнала, схему сдвига и масштабирования, устройство выборки и хранения и, наконец, АЦП.
![]() Синхронизацию выборки с частотой FД целесообразно осуществить аппаратным способом, с помощью таймера-счетчика, встроенного в микросхеме РУ-55, настроив его период счета на ТД. Таймер может работать в двух периодических режимах: импульс низкого уровня длится половину периода счета (режим 1) или же один такт общей синхронизации ТТ микропроцессорной системы независимо от периода счета (режим 3). Если тактовая частота составляет fT = 5 МГц, то ТТ = 0.2 мкс. На выборку УВХ необходимо 10 мкс, то есть, в этом плане выгодней режим 1. Однако, для запуска АЦП со строгой периодичностью ТД необходимо, чтобы импульс ST длился не более tпр=0.37 мкс, то есть, для работы АЦП как нельзя лучше подходит режим 3 ( ровный меандр ). Кроме того, короткого импульса может не хватить на сброс УВХ.
Синхронизацию выборки с частотой FД целесообразно осуществить аппаратным способом, с помощью таймера-счетчика, встроенного в микросхеме РУ-55, настроив его период счета на ТД. Таймер может работать в двух периодических режимах: импульс низкого уровня длится половину периода счета (режим 1) или же один такт общей синхронизации ТТ микропроцессорной системы независимо от периода счета (режим 3). Если тактовая частота составляет fT = 5 МГц, то ТТ = 0.2 мкс. На выборку УВХ необходимо 10 мкс, то есть, в этом плане выгодней режим 1. Однако, для запуска АЦП со строгой периодичностью ТД необходимо, чтобы импульс ST длился не более tпр=0.37 мкс, то есть, для работы АЦП как нельзя лучше подходит режим 3 ( ровный меандр ). Кроме того, короткого импульса может не хватить на сброс УВХ.
![]() Из положения можно выйти, настроив таймер на режим 1. На УВХ меандр подавать через схему задержки, состоящую из интегрирующей цепи и инвертора, на АЦП – через схему формирования короткого отрицательного импульса, состоящую из дифференцирующей цепи и инвертора. В результате импульс ST запустит АЦП, когда уровень сигнала на выходе УВХ уже стабилизировался и поддерживается постоянным.
Из положения можно выйти, настроив таймер на режим 1. На УВХ меандр подавать через схему задержки, состоящую из интегрирующей цепи и инвертора, на АЦП – через схему формирования короткого отрицательного импульса, состоящую из дифференцирующей цепи и инвертора. В результате импульс ST запустит АЦП, когда уровень сигнала на выходе УВХ уже стабилизировался и поддерживается постоянным.
При этом должны выполняться следующие временные соотношения:
![]() t1 > tпр = 0.37 мкс;
t1 > tпр = 0.37 мкс;
½ TД – t1 > tвыборки Þ t1 < 90 мс;
![]() t2 > tmin = 37 нс;
t2 > tmin = 37 нс;
t2 < tпр = 0.37 мкс.
Выберем t1 = 10 мкс. Учитывая, что порог срабатывания инвертора составляет 2.5 В, можно рассчитать постоянную времени RC-цепи:
2.5 = 5 (1 - е – ( t1 / t1 ) ); t1 = - t1 / ln 0.5 = 14 мкс.
При R = 1 кОм С = t / R » 14 нФ.
Аналогично, положим t2 = 0.1 мкс. Постоянная времени дифференцирующей RC-цепи находится из выражения:
2.5 = 5 е – ( t2 / t2 ) ; t2 = - t2 ln 0.5 = 0.144 мкс.
При R = 1 кОм С = t / R » 144 пФ.
Похожие работы

... интервал дискретизации Так как, tmax <Tд, то быстродействие устройства вполне достаточно для обработки выборки в реальном масштабе времени . Составление принципиальной схемы устройства и ее описание Принципиальная схема цифрового фильтра содержит след. микросхемы: DD1 – МП К1821ВМ85 DD2 – ПЗУ К1821РФ55 DD3 – ОЗУ К1821РУ55 DD4 – ЦАП К1108ПА1Б DА5 - ОУ К574УД1 DD6- К174ЛЕ5 ...



... С2 и транзистор оптрона VT1.2 образуют обратную связь для регулирования ШИМ, которая подается на вывод "С" микросхемы DA1 через полосовой фильтр, образованный на R1, С4, С5 и устраняющем коммутационные помехи оптроне. Резистором R5 осуществляется ограничение выходного тока преобразователя, а при помощи R4 устанавливается входной диапазон напряжений. Вторичная обмотка трансформатора TV1 разбита ...





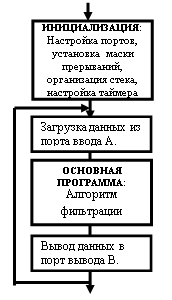
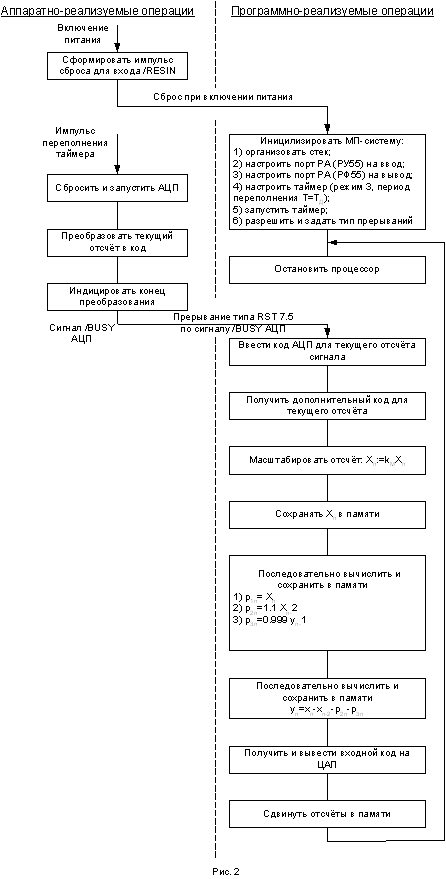
... данных в режиме простого обмена данными; q таймер (РУ55) останавливается; q содержимое ячеек ОЗУ и буферных регистров портов (РУ55) сохраняется. 3. Разработка общего алгоритма функционирования фильтра Общий алгоритм функционирования фильтра строится на основе выводов и определений, сделанных при анализе задачи, и включает в себя все функции устройства, реализуемые аппаратно и реализуемые ...


... , b2i , a2i определяют характеристики фильтра. При значениях коэффициентов фильтр имеет АЧХ фильтра верхних частот b 20 = 1;b 21 = 0;b 22 = 1.1; a 21 = 0.999;a 22 = 0.000 Разностное уравнение задает во временной области порядок получения выходной последовательности отсчетов из входной. В z-плоскости свойства цифрового фильтра описывает передаточная функция H(z), которая при двухкаскадной ...
0 комментариев