Предмет: Теория Автоматического Управления
Тема: Дискретные системы автоматического управления
1. Дискретные системы автоматического управления
Дискретные системы – это системы, содержащие элементы, которые преобразуют непрерывный сигнал в дискретный. В дискретных системах сигналы описываются дискретными функциями времени.
Квантование - процесс преобразования непрерывного сигнала в дискретный. В зависимости от используемого вида квантования системы можно классифицировать:
- импульсные системы, использующие квантование по времени;
- релейные системы, использующие квантование по уровню;
- цифровые системы, использующие квантование по уровню и по времени (комбинированное квантование).
Квантование осуществляется с помощью импульсных модуляторов, релейных элементов, а также различного рода цифровых ключей.
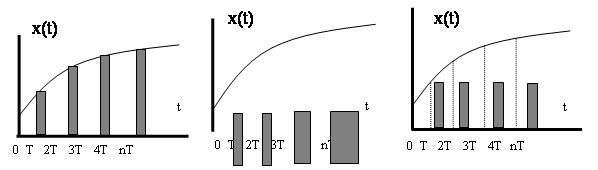
Модуляция - процесс квантования по времени. В импульсных системах в основном используются следующие виды модуляции:
- амплитудно-импульсная (АИМ)- амплитуда импульса пропорциональна амплитуде входного сигнала (рис. 1а);
- широтно-импульсная (ШИМ)- широта импульса пропорциональна амплитуде входного сигнала (рис. 1б);
- фазоимпульсная (ФИМ)- фаза импульса пропорциональна амплитуде входного сигнала (рис. 1в).
 | |||
а) б) в)
Рис. 1
В релейных системах управления используется импульсная манипуляция (ИМ), в цифровых системах используются кодоимпульсная модуляция (КИМ), при этом каждому значению амплитуды соответствует «пачка» импульсов, представляющая код амплитуды передаваемого сигнала. Этот метод квантования обладает хорошей помехоустойчивостью и широко используется в цифровых системах управления.
На рис. 2 приведен пример, иллюстрирующий процесс передачи дискретных сообщений с использованием кодоимпульсной модуляции.
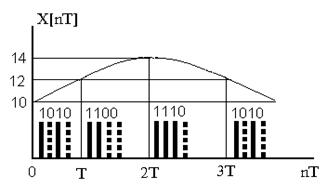
Рис. 2
При этом квантование по времени определяется тактовой частотой управляющей ЭВМ, а квантование по уровню осуществляется с помощью аналого-цифрового преобразователя (АЦП).
2. Импульсный элемент (ИЭ). Математическое описание импульсного элемента
Импульсный элемент – устройство для преобразования непрерывного сигнала в последовательность модулированных импульсов.
Импульсный элемент может быть представлен в виде двух частей: идеального импульсного элемента и формирователя импульсов.
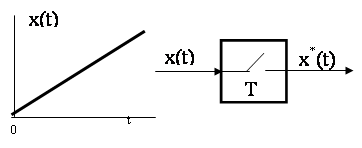
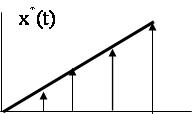
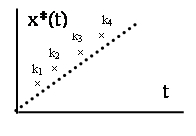
Идеальный импульсный элемент (рис. 3) преобразует непрерывный
сигнал в последовательность идеальных импульсов в виде d(t) –функций, площади которых пропорциональны амплитуде передаваемого сигнала.
 | ||||||
 | ||||||
| ||||||
Рис. 3
Для выходного сигнала импульсного элемента можно записать следующее соотношение
 , (1)
, (1)
где x[nT] - решетчатая функция, которая представляет собой значение непрерывной функции в дискретные моменты времени.
При x(t) = 1(t)
![]() . (2)
. (2)
Для любого x(t)
![]() . (3)
. (3)
Это физически не реализуемо и является математической идеализацией, вводимой для упрощения исследования дискретных систем.
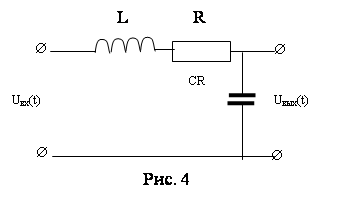
Реальный импульсный элемент (рис. 4) - импульсный элемент с конечной длительностью импульса. Он состоит из идеального импульсного элемента и формирователя.
Формирователь преобразует идеальные импульсы в импульсы длительности - gT
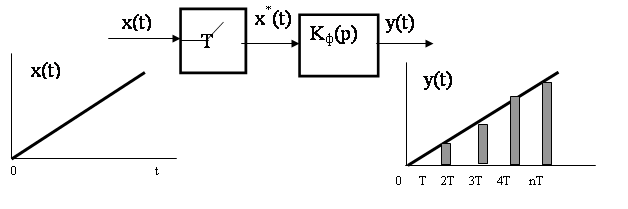
Рис. 4
Импульс конечной длительности можно представить в виде (рис. 5)
 | |||||||||||
 | |||||||||||
| |||||||||||
 | |||||||||||
| |||||||||||
| |||||||||||
Рис. 5
Функция веса формирующего звена представляет собой импульс длительностью - gT, ее можно представить как сумму двух единичных функций противоположного знака, сдвинутых на gT
![]() . (4)
. (4)
Передаточная функция формирователя имеет вид
 (5)
(5)
Формирователь при g = 1 называется фиксатором (или экстраполятором нулевого порядка), при этом его передаточная функция равна
 (6)
(6)
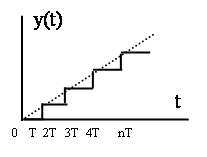
Рассмотрим импульсный элемент при g = 1 (рис. 6).
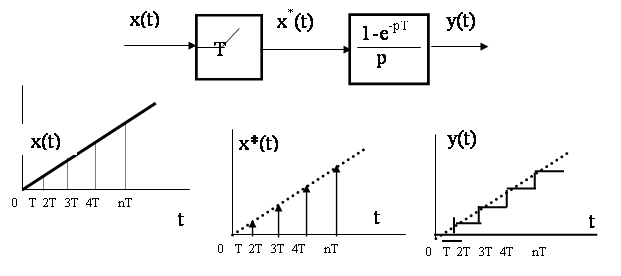
Рис. 6
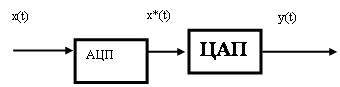
Если на вход подается аналоговый сигнал, то на выходе получаем ступенчатый сигнал. Рассмотрим схему (рис. 7), состоящую из АЦП и ЦАП:
 | |||||||||
 | |||||||||
| |||||||||
 | |||||||||
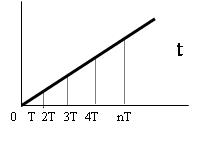 | |||||||||
Рис.7
Если на вход схемы поступает аналоговый сигнал, то на выходе АЦП получаем код, значение которого соответствует амплитуде входного сигнала, а на выходе ЦАП получаем ступенчатый сигнал.
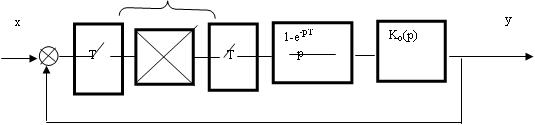
Таким образом, для того, чтобы представить процессы в цифровых системах необходимо использовать идеальный ИЭ и фиксатор. Импульсную систему можно представить в виде идеального импульсного элемента и непрерывной инерционной части, а цифровую систему в виде реального импульсного элемента и непрерывной инерционной части. Характерная схема импульсной системы управления приведена на рис. 8.
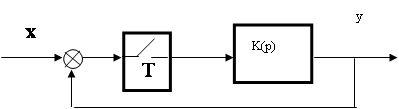
Рис. 8
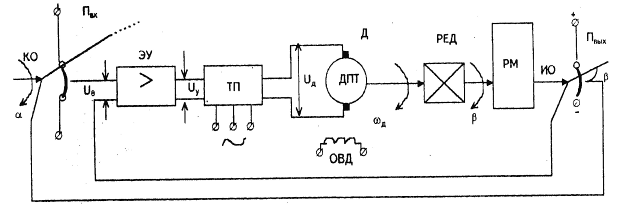
Цифровая система автоматического управления (рис. 9) состоит из аналого-цифрового преобразователя (АЦП), цифро-аналогового преобразова-теля (ЦАП), цифрового автомата (ЦА) и объекта управления.

|
-
Рис. 9
Эту схему можно представить в виде, изображенном на рис. 10.
Ka(z)
-
Рис. 10При этом цифровой автомат реализует алгоритм управления в реальном масштабе времени (Ka(z) – передаточная функция алгоритма), т. е. в течение интервала времени равного периоду дискретности –Т.
В цифровой системе квантование по уровню осуществляется с помощью АЦП, а по времени задается цифровым автоматом. Выходной преобразователь одновременно является экстраполятором нулевого порядка, сигнал на его выходе в течение периода дискретности является постоянным.
Литература
1. Бесекерский В.А., Попов Е.П. "Теория систем автоматического управления". Профессия, 2003 г. - 752с.
2. Бронштейн И.Н., Семендяев К.Н. Справочник по математике для инженеров и учащихся вузов. — М.: Наука,1986.
3. Основы теории автоматического управления / В.С. Булыгин, Ю.С. Гришанин, Н.Б. Судзиловский и др.; под ред. Н.Б. Судзиловского. М.: Машиностроение, 1985. - 512с.
4. Сборник задач по теории автоматического регулирования и управления/ Под редакцией В. А. Бесекерского. — M.: Наука, 1978.
5. Справочник по теории автоматического управления. /Под ред. А.А. Красовского- М.: Наука, 1987. - 712с.
Похожие работы
... записи в Zam_ck=inv(l+sysl)*sysl можно в диалоговом режиме произвести новую запись zpk(.) - сокращая одинаковые элементы числителя и знаменателя в Zam_ck. 2.Исследование линейной импульсной системы автоматического управления Задание: 1) Найти передаточные функции импульсной САУ: W*(z) разомкнутой системы, Ф*(z) – замкнутой системы, Фе*(z) – системы по ошибке. Параметры Т, Т1, τ1, К0, ...


... значениях функции. Начальное значение функции:. (2.10) Конечное значение функции: . (2.11) 7. Теорема запаздывания . (2.12) 4. Дифференциальные уравнения САУ При математическом описании систем автоматического управления составляют уравнения статики и динамики. Уравнения статики описывают установившиеся режимы и, как правило, являются алгебраическими. Уравнения динамики ...

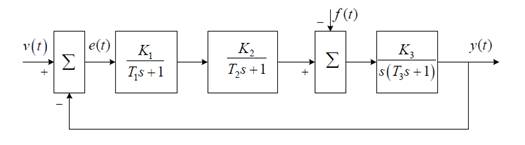
... определению: ; Составим диагональные миноры: ; ; Итак, получаем, что ; ; , т.е. условие устойчивости системы не выполняется, а следовательно система по критерию Гурвица неустойчива. 4.2 Исследование устойчивости САУ по критерию Найквиста В соответствии со структурной схемой (рис.3) АЧХ и ФЧХ разомкнутой САУ можно представить в виде произведения АЧХ и суммы ФЧХ элементарных ...


... имеют некоторый типовой вид. Сложные (многосвязные) технические объекты в совокупности с узлами (устройствами) управления первого, исполнительного уровня образуют подсистемы оперативного управления, которые представляют собой многосвязные системы автоматического регулирования (МСАР) по типу следящих систем. Задающие воздействия для них формируются на втором, тактическом уровне, а цели управления ...
0 комментариев