Навигация
Управление ошибками при передаче информации по каналам связи
22829
знаков
0
таблиц
20
изображений
Содержание
Задание
Виды способов управления ошибками
Метод эхо-контроля
Механизм передачи “бездействие – ЗПР”
Механизм передачи “непрерывная передача – ЗПР”
Описание последовательности передачи кадров в механизме обмена данными “возврат-к-N” при наличии искажений I-кадра и ACK-кадра
Описание временных параметров задержки в канале связи при передаче информации между ПС и ВС
Описание механизма тайм-аута и механизма окна
Механизм тайм-аута
Механизм окна
Расчет эффективности использования пропускной способности канала связи
Исследование зависимости величины эффективности использования канала связи от его пропускной способности
Исследование зависимости величины эффективности канала связи от длины передаваемых пакетов
Нахождение максимальной длины физического канала связи, при которой его эффективность близка к 100%, а коэффициент “а” остается меньше 1
Анализ и определение скорости передачи и длины кадра, при которых эффективность использования канала связи максимальна
Выводы
Задание
Исходные данные для расчета:
– тип канала связи: радиоэфир (спутниковая связь), ![]() (м/с);
(м/с);
– длина канала связи ![]() (м);
(м);
– скорость передачи информации ![]() (Мбит/сек);
(Мбит/сек);
– длина кадра ![]() (бит);
(бит);
– размер окна ![]() ;
;
– вероятность искажения одного бита ![]() ;
;
– режим обмена – “возврат-к-N”.
Виды способов управления ошибками
При передаче информации по каналам связи важным является не только контроль и обнаружение ошибок переданной последовательности битов, но и возможность исправления искаженного кадра или символа. Обычно исправление выполняется исправляющим устройством: когда ошибка обнаружена, оно оповещает отправителя информации об этом, а тот, в свою очередь, посылает новую копию искаженного кадра получателю. Полный цикл обнаружения и исправления ошибок принято называть управлением ошибками.
Существует две основных стратегии управления ошибками: эхо-контроль и автоматический запрос на повторение.
Метод эхо-контроляМетод эхо-контроля используется, главным образом, при асинхронной передаче символьно-ориентированной информации, например, от терминала к удаленному компьютеру. Существуют два режима обмена: локальный и удаленный.
В локальном режиме передаваемый символ ![]() пересылается компьютеру и одновременно выводится на экран терминала (рис. 1).
пересылается компьютеру и одновременно выводится на экран терминала (рис. 1).
В удаленном режиме символ ![]() сначала посылается в компьютер, а затем возвращается обратно (отражается как эхо), и только после этого выводится на экран терминала (рис. 2).
сначала посылается в компьютер, а затем возвращается обратно (отражается как эхо), и только после этого выводится на экран терминала (рис. 2).
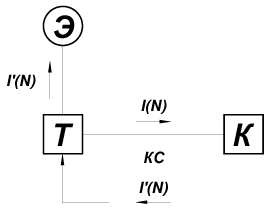
Рис. 2
Если возвращенный символ ![]() не совпадает с посланным, то пользователь посылает компьютеру управляющий символ
не совпадает с посланным, то пользователь посылает компьютеру управляющий символ ![]() (удаление), тем самым извещая компьютер о том, что предыдущий символ был получен им неверно и должен быть игнорирован (рис. 3).
(удаление), тем самым извещая компьютер о том, что предыдущий символ был получен им неверно и должен быть игнорирован (рис. 3).
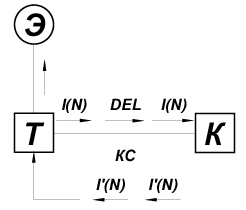
Рис. 3
Как правило, метод эхо-контроля является саморегулирующимся, однако если буферная память удаленного компьютера переполняется, то он перестает отражать символы обратно на экран терминала. Компьютер будет читать символы, а затем их аннулировать. По этой причине используется дополнительный механизм автоматического управления потоком, гарантирующий прекращение посылки символов терминалом до тех пор, пока не будет ликвидировано состояние перегрузки компьютеров.
Этот механизм заключается в том, что компьютер возвращает терминалу специальный символ “![]() -сброшен”, который указывает на необходимость прекращения посылки символов, а после ликвидации состояния загрузки компьютер посылает терминалу парный к символу “
-сброшен”, который указывает на необходимость прекращения посылки символов, а после ликвидации состояния загрузки компьютер посылает терминалу парный к символу “![]() -сброшен” символ “
-сброшен” символ “![]() -установлен”. Таким образом, давая знать управляющему узлу терминала, что он может возобновить посылку символов (рис. 4).
-установлен”. Таким образом, давая знать управляющему узлу терминала, что он может возобновить посылку символов (рис. 4).
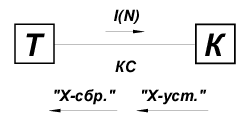
Рис. 4
Аналогичный механизм используется при взаимодействии компьютера с менее быстродействующими терминалами, например, принтерами. В этом случае поток символов регулирует управляющий узел терминала.
Эхо-контроль требует, по меньшей мере, двукратной пересылки каждого символа при непосредственном участии самого пользователя и, следовательно, относительно неэффективно использует пропускную способность канала связи. Однако вследствие своей простоты эхо-контроль широко применяется во многих системах обмена информацией.
Автоматический запрос на повторение используется в случае, когда пользователь не вовлечен непосредственно в процесс передачи данных, поскольку обмен информацией между двумя узлами оборудования системы осуществляется несколькими методами и автоматически. Общим для всех методов является то, что они требуют возврата лишь небольшого сообщения или кадра, извещающего о правильности или неправильности принятого кадра, а не повторной передаче его копии.
Это особенно важно при кадро-ориентированной передаче, когда пересылаемый кадр может содержать достаточно большое количество байтов или символов. Такое использование схемы извещения (![]() и
и ![]() -кадры) называется автоматическим запросом на повторение.
-кадры) называется автоматическим запросом на повторение.
В зависимости от объема буферной памяти и пропускной способности канала связи возможны 2 наиболее часто реализуемых режима работы схемы извещения: “бездействие – ЗПР” (послать-и-ждать) и “непрерывная передача – ЗПР”. Последний режим может применять либо стратегию выборочной повторной передачи, либо механизм “возврат-к-N”.
Механизм передачи “бездействие – ЗПР”Режим “бездействие – ЗПР” наименее эффективно использует пропускную способность каналов связи. Рассмотрим 3 режима работы этого механизма:
1. При передаче без ошибок.
2. При искажении I-кадра.
3. При искажении ACK-кадра.
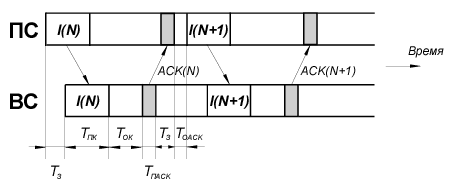
Рис. 5
![]() – время задержки при передаче данных (от первой станции ко второй);
– время задержки при передаче данных (от первой станции ко второй);
![]() – время передачи
– время передачи ![]() -кадра;
-кадра;
![]() – время обработки
– время обработки ![]() -кадра принимающей станцией;
-кадра принимающей станцией;
![]() – время передачи
– время передачи ![]() -кадра;
-кадра;
![]() – время обработки
– время обработки ![]() -кадра принимающей станцией.
-кадра принимающей станцией.
Во многих случаях передачи данных ![]() -кадры передаются одновременно в обоих направлениях, обозначим источник
-кадры передаются одновременно в обоих направлениях, обозначим источник ![]() -кадров как ПС, а их приемник – ВС. Для простоты будет рассматриваться только односторонний поток.
-кадров как ПС, а их приемник – ВС. Для простоты будет рассматриваться только односторонний поток.
В режиме “бездействие – ЗПР” используется следующий порядок обмена кадрами:
1. ПС может иметь только один выделенный ![]() -кадр, ожидающий извещения (
-кадр, ожидающий извещения (![]() -кадр).
-кадр).
2. Инициируя пересылку ![]() -кадра, ПС запускает таймер.
-кадра, ПС запускает таймер.
3. Если ВС получает ![]() -кадр или ПС получает
-кадр или ПС получает ![]() -кадр, содержащий ошибки, то эти кадры аннулируются.
-кадр, содержащий ошибки, то эти кадры аннулируются.
4. Получив ![]() -кадр, не содержащий ошибок, ВС возвращает ПС кадр
-кадр, не содержащий ошибок, ВС возвращает ПС кадр ![]() .
.
5. Получив ![]() -кадр, не содержащий ошибок, ПС может послать следующий
-кадр, не содержащий ошибок, ПС может послать следующий ![]() -кадр.
-кадр.
6. Если ПС не получает ![]() -кадр в течение некоторого заранее заданного промежутка времени, называемого интервалом тайм-аута, то она вновь посылает ожидающий
-кадр в течение некоторого заранее заданного промежутка времени, называемого интервалом тайм-аута, то она вновь посылает ожидающий ![]() -кадр.
-кадр.
Эта схема обеспечивает поступление по крайней мере одной правильной копии, пересланной ПС, однако если искажает, а следовательно и аннулирует сам кадр ![]() , то возможно, что ВС получит 2 или более копии одного
, то возможно, что ВС получит 2 или более копии одного ![]() -кадра. Их называют “дубликатор”. ВС хранит идентификатор последнего
-кадра. Их называют “дубликатор”. ВС хранит идентификатор последнего ![]() -кадра, поступившего без ошибок, и аннулирует все вновь поступающие
-кадра, поступившего без ошибок, и аннулирует все вновь поступающие ![]() -кадры, если ранее она уже их получала без ошибок (рис. 6).
-кадры, если ранее она уже их получала без ошибок (рис. 6).
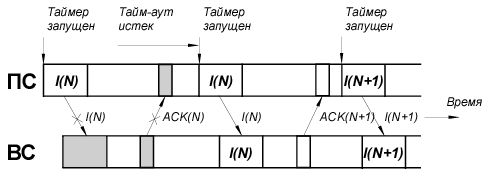
Рис. 6
Чтобы обеспечить ПС возможность новой синхронизации, ВС в ответ на каждый правильно поступивший кадр посылает ![]() -кадр.
-кадр.
Метод “бездействие – ЗПР” неэффективно использует пропускную способность каналов связи, поскольку в лучшем случае полное время ожидания первичной станцией равно:
![]() (1)
(1)
Только по истечению этого времени ПС может послать новый ![]() -кадр, даже если предшествующий кадр был правильно получен ВС. В наихудшем случае задержка равна интервалу тайм-аута, который для корректной работы механизма всегда должен быть больше
-кадр, даже если предшествующий кадр был правильно получен ВС. В наихудшем случае задержка равна интервалу тайм-аута, который для корректной работы механизма всегда должен быть больше ![]() . В силу этого некоторые схемы “бездействие – ЗПР” используют дополнительно кадр негативного извещения –
. В силу этого некоторые схемы “бездействие – ЗПР” используют дополнительно кадр негативного извещения – ![]() -кадр, позволяющий ВС немедленно сообщить о поступлении искаженного
-кадр, позволяющий ВС немедленно сообщить о поступлении искаженного ![]() -кадра, а не ожидать, пока механизм тайм-аута инициирует посылку новой копии
-кадра, а не ожидать, пока механизм тайм-аута инициирует посылку новой копии ![]() -кадра.
-кадра.
Основным достоинством метода “бездействие – ЗПР” является то, что для него требуется минимальная буферная память, т.к. ПС и ВС должны содержать буферную память только для одного кадра. Для обнаружения дубликатов достаточно хранить запись идентификатора только последнего правильно полученного кадра.
Благодаря минимальным требованиям к памяти механизм “бездействие – ЗПР” широко используется тогда, когда на одном из концов соединения используется сравнительно простые устройства (терминалы или приборы).
Механизм передачи “непрерывная передача – ЗПР”При этом механизме звено данных используется значительно эффективнее по сравнению с механизмом “бездействие – ЗПР” за счет повышения требований к объему буферной памяти.
На рис. 7 показана работа этого механизма передачи. Предполагается, что ошибок при передаче кадров нет.
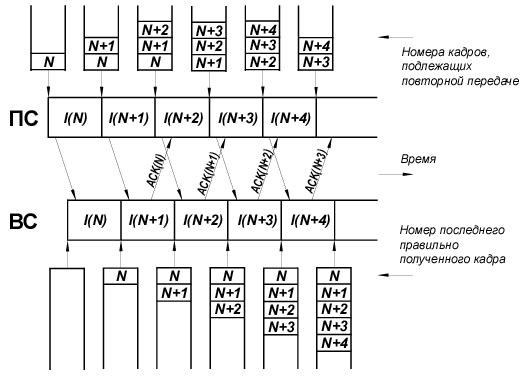
Рис. 7
ПС непрерывно посылает ![]() -кадры, не дожидаясь возвращения
-кадры, не дожидаясь возвращения ![]() -кадров. ПС сохраняет копии каждого посланного
-кадров. ПС сохраняет копии каждого посланного ![]() -кадра в списке повторных передач. Список повторных передач функционирует в режиме FIFO. ВС возвращает
-кадра в списке повторных передач. Список повторных передач функционирует в режиме FIFO. ВС возвращает ![]() -кадр для каждого правильно принятого
-кадр для каждого правильно принятого ![]() -кадра. Каждый
-кадра. Каждый ![]() -кадр содержит уникальный идентификатор, возвращаемый в соответствующем кадре
-кадр содержит уникальный идентификатор, возвращаемый в соответствующем кадре ![]() . ВС ведет так называемый список поступлений, содержащий идентификаторы последних правильно полученных
. ВС ведет так называемый список поступлений, содержащий идентификаторы последних правильно полученных ![]() -кадров. При получении
-кадров. При получении ![]() -кадра ПС исключает соответствующий
-кадра ПС исключает соответствующий ![]() -кадр из списка повторных передач. Из диаграммы последовательности кадров видно, что при отсутствии ошибок передачи эффективность использования звена данных будет всегда равна 1, если только передача
-кадр из списка повторных передач. Из диаграммы последовательности кадров видно, что при отсутствии ошибок передачи эффективность использования звена данных будет всегда равна 1, если только передача ![]() -кадров не будет чем-либо ограничена.
-кадров не будет чем-либо ограничена.
На рисунке 8 представлен принцип работы механизма “возврат-к-N” при искажении ![]() -кадра. При этом предполагается, что
-кадра. При этом предполагается, что ![]() кадр искажен, и поступающий в ВС
кадр искажен, и поступающий в ВС ![]() кадр нарушает порядок поступления кадров. В этом случает ВС, получив
кадр нарушает порядок поступления кадров. В этом случает ВС, получив ![]() кадр, посылает
кадр, посылает ![]() для этого кадра, указывая, что последним кадром, правильно ей полученным, был кадр
для этого кадра, указывая, что последним кадром, правильно ей полученным, был кадр ![]() .
.
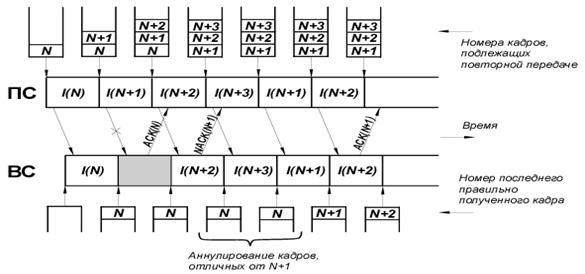
Рис. 8
ВС после отправки кадра ![]() аннулирует
аннулирует ![]() и все последующие кадры –
и все последующие кадры – ![]() . Это будет продолжаться до тех пор, пока она не получит следующий по порядку за правильно полученным
. Это будет продолжаться до тех пор, пока она не получит следующий по порядку за правильно полученным ![]() кадр. После его получения ВС начнет работать в нормальном режиме.
кадр. После его получения ВС начнет работать в нормальном режиме.
Пусть при передаче искажаются ![]() -кадры (рис. 9), но ВС получает все
-кадры (рис. 9), но ВС получает все ![]() -кадры правильно. Пусть будут искаженными
-кадры правильно. Пусть будут искаженными ![]() и
и ![]() . Получив
. Получив ![]() , ПС обнаруживает, что в списке повторных передач имеются два (
, ПС обнаруживает, что в списке повторных передач имеются два (![]() и
и ![]() ) выделенных
) выделенных ![]() -кадра. Так как используется кадр
-кадра. Так как используется кадр ![]() , а не
, а не ![]() , то ПС решает, что предшествующие два кадра
, то ПС решает, что предшествующие два кадра ![]() (
(![]() и
и ![]() ) были искажены, но при этом ВС правильно получала
) были искажены, но при этом ВС правильно получала ![]() ,
, ![]() и
и ![]()
![]() -кадры.
-кадры.
Стратегия “возврат-к-N” обеспечивает правильный порядок ![]() -кадров, сокращая требования к объему буфера.
-кадров, сокращая требования к объему буфера.
Так как данный алгоритм требует повторной передачи некоторых уже правильно полученных кадров ![]() -кадров, то он использует пропускную способность звена менее эффективно, чем метод выборочной повторной передачи.
-кадров, то он использует пропускную способность звена менее эффективно, чем метод выборочной повторной передачи.
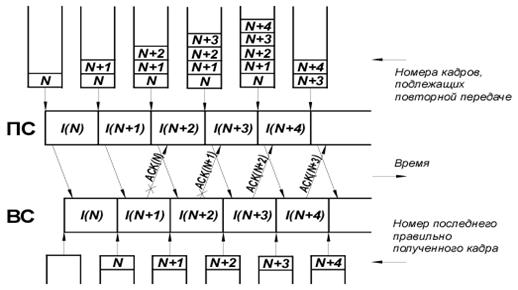
Рис. 9
Описание временных параметров задержки в канале связи при передаче информации между ПС и ВС
Отношение значений различных компонент, составляющих ![]() (формула 1), различно для различных типов звеньев данных. Оно определяется такими факторами как физическая удаленность друг от друга систем связи (ПС и ВС) и скоростью передачи данных по звену. Практически время обработки кадра
(формула 1), различно для различных типов звеньев данных. Оно определяется такими факторами как физическая удаленность друг от друга систем связи (ПС и ВС) и скоростью передачи данных по звену. Практически время обработки кадра ![]() и время
и время ![]() , связанного с ним кадра, относительно мало по сравнению с временем передачи. Кроме того, так как
, связанного с ним кадра, относительно мало по сравнению с временем передачи. Кроме того, так как ![]() -кадр значительно короче
-кадр значительно короче ![]() -кадра, то время, которое истекает до того, как может быть передан следующий
-кадра, то время, которое истекает до того, как может быть передан следующий ![]() -кадр, зачастую приблизительно считается равным
-кадр, зачастую приблизительно считается равным ![]() , поэтому эффективность имеющейся пропускной способности звена данных вычисляется как
, поэтому эффективность имеющейся пропускной способности звена данных вычисляется как
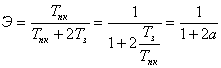 , (2)
, (2)
где ![]() (при отсутствии ошибок при передаче).
(при отсутствии ошибок при передаче).
Задержка передачи ![]() равна времени, необходимому электрическому сигналу, чтобы достичь другого конца линии связи. Следовательно, оно будет одинаковым для обоих направлений и для обоих кадров (
равна времени, необходимому электрическому сигналу, чтобы достичь другого конца линии связи. Следовательно, оно будет одинаковым для обоих направлений и для обоих кадров (![]() и
и ![]() ). Скорость распространения в лучшем случае равна скорости распространения света. В реальных проводниках она меньше (
). Скорость распространения в лучшем случае равна скорости распространения света. В реальных проводниках она меньше (![]() м/с).
м/с).
Таким образом, задержка передачи равна физическому расстоянию (![]() ) между станциями, поделенному на скорость передачи электрического сигнала по линии (
) между станциями, поделенному на скорость передачи электрического сигнала по линии (![]() ). Большое значение имеет отношение
). Большое значение имеет отношение ![]() , т.к. оно соотносит время задержки передачи сигнала со временем, требуемым для передачи кадра. Обычно это отношение колеблется от небольшого значения (для небольших звеньев) до больших значений для длинных звеньев и высокой скорости передачи:
, т.к. оно соотносит время задержки передачи сигнала со временем, требуемым для передачи кадра. Обычно это отношение колеблется от небольшого значения (для небольших звеньев) до больших значений для длинных звеньев и высокой скорости передачи:
1. Для относительно коротких звеньев, для которых ![]() , эффективность их использования близка к 1 и не зависит от его пропускной способности.
, эффективность их использования близка к 1 и не зависит от его пропускной способности.
2. Для более длинных наземных кабелей эффективность звеньев высока (![]() ) при низкой пропускной способности и существенно падает при ее увеличении.
) при низкой пропускной способности и существенно падает при ее увеличении.
Похожие работы




... 1.5 Уровни помех и линейных затуханий 1.5.1 Электрические помехи в каналах ВЧ связи по ВЛ Электрические помехи имеются в любом канале связи. Они являются основным фактором, ограничивающим дальность передачи информации из-за того, что сигналы, принимаемые приемником, искажаются помехами. Для того чтобы искажения не выходили за пределы, допустимые для данного вида информации, должно быть ...


... , числовых данных, компьютерных файлов и т.п., то есть там, где недопустимы даже малейшие отличия исходных и восстановленных данных. Во многих случаях нет необходимости в абсолютно точной передаче информации от источника к ее потребителю, тем более что в канале связи всегда присутствуют помехи и абсолютно точная передача в принципе невозможна. В таких случаях может быть использовано разрушающее ...
... . Предлагается, для самого дешевого решения, на каждый из клиентских компьятеров установить ОС Windows 95. Администрация Владимирской области обладает лицензией на использование данного продукта. Фирма Shiva, крупнейший поставщик оборудования и программного обеспечения для корпоративных территориальных сетй связи, помогла фирме Microsoft внедрить в Windows 95 функции удаленного доступа. ...
... обеспечения безопасности информации: Препятствие — метод физического преграждения пути злоумышленнику к защищаемой информации (к аппаратуре, носителям информации и т.д.). Управление доступом — методы защиты информации регулированием использования всех ресурсов ИС и ИТ. Эти методы должны противостоять всем возможным путям несанкционированного доступа к информации. Управление доступом ...
0 комментариев