Навигация
Расчет основных характеристик импульсно-фазовой радионавигационной системы "Лоран-С" и приемоиндикатора этой системы
33100
знаков
8
таблиц
13
изображений
КУРСОВОЙ ПРОЕКТ
по дисциплине: «Радионавигационные системы»
Тема: «Расчет основных характеристик ИФ РНС «Лоран‑С» и приемоиндикатора этой системы»
Введение
Одной из основных задач в судовождении является определение истинного места судна независимо от видимости и состояния моря с любой периодичностью во времени. В настоящее время наиболее полно эта задача решается с помощью наземных и частично спутниковых радионавигационных систем (РНС). Как следствие решения основной задачи РНС позволяют определять абсолютную путевую скорость судна, путевой угол, пройденный путь, время (с точностью до 0,1 мкс), а также обеспечивать диспетчерское управление движением судов в стесненных условиях и на подходах к портам.
РНС включают в себя три функционально взаимосвязанных комплекса радиотехнической аппаратуры:
1) передающие станции, устанавливаемые на неподвижных или подвижных точках с известными координатами;
2) приемоиндикаторы, устанавливаемые на судах, военных кораблях и других подвижных объектах и позволяющие по принятым сигналам от передающих станций с помощью вычислителей или специальных карт и таблиц определять необходимые навигационные данные;
3) береговая аппаратура управления передающими станциями.
РНС, в отличие от средств радиосвязи, являются измерительными системами. Полезная информация в РНС образуется не в передающем тракте, а в тракте распространения радиоволн благодаря функциональной зависимости параметров электромагнитного поля принимаемых сигналов от координат судна. По существу РНС базируются на свойстве радиоволн распространяться в однородной среде по кратчайшим расстояниям с конечной скоростью (~ 300 м/мкс).
Важное значение имеет и свойство интерференции радиоволн, которое обусловливает появление перемежающихся зон максимальной и минимальной интенсивности суммарного поля от двух источников когерентных колебаний.
РНС классифицируются по ряду критериев. Один из основных критериев – вид параметра электромагнитного поля, в результате измерения которого выделяется полезная информация о данных, необходимых для навигации судна.
Если полезная информация выявляется при измерении величины сдвига временного положения принимаемого радиоимпульса относительно эталонной и общей для береговой и судовой аппаратуры шкалы времени, то РНС относится к временной. Временные РНС, как правило, являются импульсными.
В фазовых РНС временное положение сигнала оценивается из фазовых измерений. Особенностью фазовых РНС является то что они позволяют определить запаздывание одного колебания относительно другого лишь в пределах периода.
Если мгновенная частота излучаемых колебаний непостоянна и меняется по некоторому закону, тогда по измерениям частоты принимаемого колебания относительно эталонной можно определить расстояние и РНС такого типа следует отнести к частотным.
В принципе можно построить и амплитудную РНС, в которой полезная информация о дальности получается при измерении амплитуды электрической составляющей поля. Однако непостоянство величины ослабления сигнала делает такие измерения дальности недостоверными.
Амплитудные РНС находят широкое применение в основном для измерения углов между эталонным направлением и направлением на передающую станцию.
Второй критерий классификации РНС обусловливается геометрическими величинами, которые измеряются приемоиндикатором: углом, расстоянием, разностью расстояний, линейной комбинацией расстояний. Прежде чем обсуждать это направление классификации РНС, целесообразно привести некоторые понятия и термины из курса общей навигации.
Определение места судна в навигации математически решается как задача об отыскании положения точки на земной поверхности или на проекции этой поверхности (на навигационной карте). Как известно, положение точки на поверхности может быть определено пересечением минимум двух линий. Для того чтобы РНС могли способствовать решению задач навигации, они должны давать возможность построить на карте эти две линии положения (ЛП) судна с достаточной точностью. Измеряемыми геометрическими величинами в РНС могут быть углы, расстояния до излучателя, разности расстояний до двух излучателей.
Угломерные РНС применяются на сравнительно небольших расстояниях от береговых передающих станций, радиомаяков и имеют недостаточную точность определения места.
Дальномерные РНС, несмотря на их преимущество с геометрической точки зрения перед любыми другими системами, пока не нашли широкого применения на морском флоте из-за отсутствия генераторов колебаний – хранителей времени высокой стабильности, которые формируют шкалу времени.
Наивысшие точности определения места среди них на средних дальностях дают фазовые радионавигационные системы.
Однако фазовые РНС дают многозначные отчеты и зависят от распространения пространственных, отраженных от ионосферы радиоволн. Это ограничивает дальность действия систем ночью до 150–240 миль.
Для устранения многозначности фазовых отсчетов излучаются специальные сигналы, а в судовые устройства вводятся дополнительные индикаторные цепи. Поэтому наряду с фазовыми РНС создавались и импульсные, главным достоинством которых является возможность разделения сигналов, распространяющихся поверхностными и пространственными лучами. Такое разделение сигналов позволяет использовать поверхностные радиоимпульсы для точных определений места на значительных удалениях от береговых станций. Использование пространственных радиоимпульсов еще более увеличивает рабочую область РНС для определений места судна с точностью, достаточной при плаваниях в открытом море. Однако импульсные РНС уступают фазовым системам по точности, простоте и быстроте определений места.
Стремление увеличить дальность действия РНС при сохранении точности фазовых измерений привело к разработке импульсно-фазовых систем с излучением сигналов в диапазоне длинных радиоволн. Определение места судна в импульсно-фазовых РНС производится путем измерения разности фаз между несущими колебаниями, заполняющими радиоимпульс. Огибающая радиоимпульсов служит для устранения многозначности фазовых измерений.
Импульсно-фазовые системы объединяют положительные и исключают отрицательные свойства импульсных и фазовых РНС, работающих в диапазоне длинных и средних волн.
Импульсные системы позволяют избавиться от влияния пространственных радиоволн и поэтому обеспечивают перекрытие обширных рабочих зон, но в импульсных системах точность измерения временного положения огибающей радиоимпульсов существенно ниже, чем точность фазовых измерений.
Фазовые системы используют непрерывные сигналы и позволяют измерять временное запаздывание сигналов с точностью до сотых долей периодов высокочастотных составляющих этих сигналов, но подвержены сильному влиянию отраженных от ионосферы радиоволн, что практически не позволяет использовать фазовые системы на больших удаленьях ночью.
Основные принципы работы длинноволновой импульсно-фазовой системы (ИФРНС) «Лоран‑С». Береговые передающие станции ИФ РНС работают группами, образующими единую цепочку. Цепочка состоит из ведущей станции и нескольких ведомых станций (двух–пяти) излучения радиоимпульсов которых строго синхронизированы передачами ведущей станции. Каждая ведомая станция с ведущей образуют пару, которая определяет гиперболические изолинии системы. Длина баз пар станций – от 600 до 800 миль.
Такие сравнительно длинные базы обеспечивают хорошие углы пересечения линий положения судна, полученные от разных пар на значительных расстояниях от береговых станций.
Ведомые станции принимают радиоимпульсы ведущей станции и используют их для точной синхронизации по частоте и фазе собственных излучаемых радиоимпульсов. Синхронизация ведется как по огибающим, так и по фазе высокочастотных заполнений радиоимпульсов. Сигналы ведомых станций излучаются в определенной очередности, после чего излучает снова ведущая станция и т.д. Каждая из N станций излучает свои сигналы спустя некоторый защитный промежуток времени tзщ после момента приема сигналов станции, которая в за данной очередности излучений является предшествующей.
Все цепи системы работают на несущей частоте 100 кГц и отличаются лишь периодами повторения, которые объединяются в четыре группы и обозначаются буквами S, SH, SL, SS. Каждая группа состоит из восьми рекуррентных частот повторения, обозначаемых порядковым номером N от 0 до 7. Численное значение периодов следования в микросекундах определяется: для цепочек, обозначаемых S, – формулой TS= (500 – N)×100; для цепочек, обозначаемых SH, – формулой TSH = (600 – N)×100; для цепочек, обозначаемых SL, – формулой TSL = (800 – N)×100 и для цепочек, обозначаемых SS, – формулой TSS= (1000‑N)×100.
Дальность действия системы зависит от средней мощности излучаемых сигналов, которая равна импульсной мощности сигнала, умноженной на отношение длительности импульса к периоду повторения.
Увеличение импульсной мощности ограничивается эффективностью антенн и их электрической прочностью. Увеличение длительности импульса не приводит к желаемому результату, так как в импульсно-фазовой системе используется только начальная часть импульса длительностью 30–40 мкс, которая не подвержена воздействию пространственной волны. И, наконец, увеличение средней мощности можно получить, уменьшая значение Т. Однако величина Т, как указывалось выше, определяет возможность приема сигналов ведущей и ведомых станций без перекрытия их между собой во всей рабочей зоне системы. Поэтому уменьшение значения Т допустимо до определенных значений.
В системе «Лоран‑С» применен особый способ увеличения средней мощности. Он заключается в том, что. станция излучает не один импульс за период Т, а целую серию, состоящую из восьми импульсов на ведомых станциях и девяти–на ведущей. Девятый импульс излучается для визуального опознавания ведущей станции и для передачи простейших команд ведомым станциям. Длительность каждого импульса 100–120 мкс на уровне 6 дБ, промежуток между импульсами в серии 1000 мкс, т.е. длительность всей серии из восьми импульсов составляет 7000 мкс.
Излучения серии («пакета») приводят к техническим усложнениям системы. Основной из причин усложнения является необходимость устранения влияния пространственных радиоволн кратного отражения каждого предыдущего импульса «пакета» на последующий поверхностный импульс в серии.
Устранение влияния пространственных волн от предыдущих импульсов на последующие достигается применением фазового кодирования, которое заключается в изменении фазы колебаний высокочастотного заполнения в каждом импульсе серии на 180°. При этом фазирование импульсов четных серий отличается от фазирования нечетных серий и для устранения влияния пространственных волн используется два периода Т повторения серий импульсов.
В табл. 1 показано фазовое кодирование, примененное в системе «Лоран‑С». Здесь знак «+» условно отвечает фазе несущих колебаний, принятой за 0°, а знак «–» изменению этой фазы на 180°.
Таблица 1
| Излучения | Ведущая | Ведомая |
| Импульсы | 1 2 3 4 5 6 7 8 | 1 2 3 4 5 6 7 8 |
| Четные серии | + + – – + – + – | + + + + + – – + |
| Нечетные | + – – + + + + + | + – + – + + – – |
Фазовое кодирование импульсов в серии устраняет влияние пространственных волн предыдущего импульса в серии на последующий и облегчает автоматическое опознавание ведущей станции и слежение за ней при превышениях уровня шумов над сигналом. В настоящее время осуществляется автоматическое слежение за сигналами ведущей станции до соотношений сигнал / помеха = 1: 10 (20 дБ) на отсчетном уровне импульсов. При таком высоком уровне шумов визуальное опознавание сигналов станции на экране индикатора невозможно, так как шумы полностью маскируют полезные сигналы.
Сигналы «Лоран‑С» используются не только для навигации, но и в качестве сигналов точного времени.
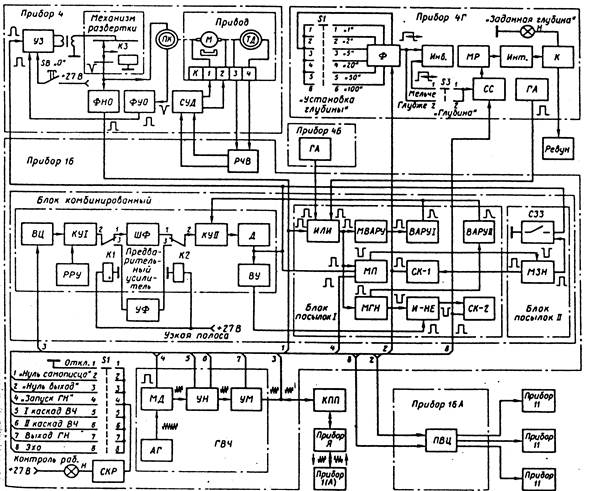
Принцип работы приемоиндикатора в режиме измерения
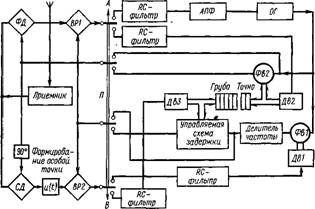
Блок-схема приемоиндикатора ИФ РНС в режиме точных измерений
Упрощенная блок-схема приемоиндикатора в режиме измерения промежутка времени между моментами прихода сигналов ведущей и одной из ведомых станций.
Все элементы приемоиндикатора, осуществляющие фазовое кодирование и поиск, из этой схемы исключены для большей наглядности изложения. С этой же целью – для облегчения понимания основных принципов работы – можно представить, что ведущая и ведомая станции излучают не «пакеты» радиоимпульсов, а одиночные радиоимпульсы.
Принимаемые импульсы ведущей и ведомой поступают на фазовый детектор ФД и синхронный детектор СД. Схема СД, не отличается от схемы ФД, только опорное колебание СД сдвинуто по фазе на 90° по отношению к опорному напряжению ФД.
Пусть сигналы ua (t) и ив (t) ведущей и ведомой станций на выходе приемника имеют вид:
иА (t) = U (t–tA) sin w(t–tA) = U (t–tA) sin (wt–jA);
иB (t) = U (t–tB) sin w(t–tB) = U (t–tB) sin (wt–jA),
где tA и tB – моменты прихода сигналов А и В. Эти моменты отсчитываются от момента излучения сигнала ведущей станции А. Функции U (t – tA) и U (t – tB) имеют смысл лишь в пределах длительности импульса tи; например, U (t–tA) = 0 при t < tA и t >tA + tи.
Фазовая автоподстройка опорного генератора сигналами ведущей станции производится следующим образом. Поиск передней части поверхностного сигнала предполагается уже выполненным. Поэтому в схеме должна осуществляться соответствующая коммутация переключателя П в такт приема сигналов береговых станций, а опорные кратковременные стробы временного различителя ВР1 на выходе ФД должны выделять лишь ту часть напряжения рассогласования, которая соответствует передней части поверхностных радиоимпульсов. Отстробированные напряжения передаются на блок фазовой автоподстройки АПФ опорного генератора. В результате фаза j0 опорного генератора изменяется до тех пор, пока не будет отличаться точно на 90° от фазы ВЧ заполнения радиоимпульса и постоянное напряжение на выходе ФД, обусловливаемое поверхностным радиоимпульсом, не станет равным нулю. Таким образом, фаза j» колебания на выходе опорного генератора будет хранить память о фазе ВЧ заполнения, поскольку j0 = jА + 90°. Фаза опорного напряжения СД при этом будет точно совпадать с фазой ВЧ заполнения поверхностного радиоимпульса ведущей станции.
Поэтому на выходе СД появится видеоимпульс U (t – tA). Он поступает на схему формирования напряжения, имеющего одну «точку» смены знака в пределах переднего фронта радиоимпульса. Пусть эта точка отстоит на интервал t0 от начала импульсов. С выхода схемы формирования особой точки напряжение поступает на временной различитель ВР2 и служит для уточнения временного положения измерительных опорных стробов. Опорные стробы, как видно из блок-схемы, получаются из колебаний опорного генератора, прошедших фазовращатель Фв1 и делитель частоты. На выходе делителя частоты и формируются измерительные стробы ведущего канала. Длительность каждого строба 3–5 мкс, а период повторения Т равен периоду повторения сигналов береговых станций. Если эти стробы не совпадают с особыми точками огибающих радиоимпульсов ведущей станции, на выходе ВР2 появится сигнал рассогласования. Сигналы рассогласования с выхода ВР2 имеют вид кратковременных видеоимпульсов с длительностью, равной длительности опорных стробов. Полярность этих видеоимпульсов определяется стороной отклонения опорных стробов от истинного положения особой точки огибающей. Кратковременные сигналы рассогласования накапливаются в соответствующем RС-фильтре и, после усиления, управляют положением ротора фазовращателя Фв1 до тех пор, пока рассогласование не будет исключено. Временное положение tДЧ опорных стробов с выхода делителя частоты станет совпадать с особой точкой, т.е. tДЧ = tA + t0.
При движении судна таким образом будет вестись автоматическое слежение за фазой и огибающей сигналов ведущей станции.
Рассмотрим теперь работу измерительного канала ведомой станции. Во время прихода сигналов ведомой станции опорное напряжение на ФД поступает через фазовращатель Фв2. Если на выходе ФД имеется сигнал рассогласования, то этот сигнал после накопления в RC‑фильтре и соответствующего усиления приведет во вращение двигатель Дв2. Положение ротора Фв2 будет изменяться до тех пор, пока сигнал рассогласования не станет равным нулю, а фаза колебания jф на выходе фазовращателя не будет отличаться точно на 90° от фазы ВЧ заполнения радиоимпульсов ведомой станции.
Таким образом, непрерывное колебание на выходе фазовращателя будет запоминать фазу ВЧ заполнения сигналов ведомой станции, т.е. jф = jВ + 90°.
Как видно из блок-схемы, при этом ФВ2 покажет разность фаз Dj = jВ – jА между ВЧ заполнениями радиоимпульсов ведущей и ведомой станций. Фазовый отсчет индицируется на части барабанного счетчика, обозначенной на блок-схеме словом «Точно». Фазовый отсчет определяется в пределах периода ВЧ заполнения, равного 10 мкс.
После отработки Фв2 опорное колебание на СД будет совпадать по фазе с ВЧ заполнением радиоимпульсов ведомой станции. На выходе СД будут появляться видеоимпульсы, повторяющие огибающую U (t – tB) радиоимпульсов ведомых станций. Эти видеоимпульсы, аналогично сигналам ведущей станции, поступают на схему формирования напряжения с одной переменной знака в особой точке в пределах фронта радиоимпульсов и затем на ВР. Опорные стробы наВР2 теперь поступают с выхода схемы управляемой задержки.
Схема управляемой задержки позволяет получить измерительные стробы, задержанные относительно измерительных стробов ведущей станции. Величина задержки может изменяться. Существует несколько разновидностей схем управляемой задержки. Варианты таких схем рассматривались б первом разделе.
Если измерительные стробы ведомого канала не совпадают с особыми точками огибающих сигналов ведомых станций, то появляющийся на выходе ВР2 сигнал рассогласования изменит управляемую задержку до необходимого значения. Временное положение tспз опорных стробов на выходе схемы переменной задержки будет совпадать с особой точкой сигналов ведомой станции, т.е. tспз = tB + t0.
Отсчетное устройство схемы переменной задержки укажет значение промежутка Dtмежду моментами появления стробов с выхода ДЧ и стробов с выхода схемы переменной задержки Dt = tспз – tдч = tВ–tA. Отсчет по огибающей индицируется на части барабанного счетчика, обозначенной на блок-схеме словом «Грубо».
Счетчик имеет декадную оцифровку, причем каждая единица крайнего правого барабана счетчика огибающей соответствует десяти микросекундам. Обе части барабанного счетчика дают единый однозначный отсчет разности запаздывания поверхностных сигналов ведомой станции по отношению к сигналам ведущей станции. Однозначность фазовых измерений в импульсно-фазовой системе обеспечивается, если ошибка отсчетов огибающей не будет превышать половины периода Т высокочастотного заполнения, т.е. Dt0 < T1/2 = 5 мкс.
Реальная схема приемоиндикатора в режиме измерений имеет также устройство, осуществляющее фазовое кодирование опорных напряжений фазового и синхронного детекторов по закону фазового кода пакетов радиоимпульсов ведущей и ведомой станций.
Расчетная часть
Похожие работы
... 5о. при перевозке ферромагнитных грузов допускается использование временной таблицы девиации. Гирокомпас готовят согласно Правилам технической эксплуатации и соответствующей инструкции. Запускают его заблаговременно, не позже, чем за 6 часов до отхода судна. Постоянная поправка гирокомпаса определяется: после длительной стоянки судна, смены гиросферы или поддерживающей жидкости в основном приборе ...
... 6765$ 2.9 Расчет рамки и сетки карты графического плана переход Результаты всей предыдущей работы по навигационному проектированию переоформляем в виде графического плана перехода на двух листах формата А-1. Первый из листов охватывает в мелком масштабе (1:2000000) весь переход (от порта Малага до порта Неаполь), а второй – крупномасштабный () сложный участок перехода. Для построения ...
... по формуле: где М – СКП места судна. 2.14 Графический план перехода Перед выходом в море судоводитель должен подготовить к плаванию штурманскую часть. Выяснив цель перехода, конечный и промежуточные пункты захода судна, ориентировочные сроки плавания, штурман приступает к составлению плана перехода. Этот план включает в себя: ¨ общие расчеты плавания – ходовое время, скорости на ...
... до 5-8 м. Колебания уровня. При западных ветрах уровень воды в порту Неаполь обычно повышается, при восточных - понижается. Величина колебаний уровня воды иногда достигает 1 м. Навигационное оборудование. Подход к порту Неаполь и плавание по его акватории обеспечиваются средствами навигационного оборудования. Лоцманская служба. Лоцманская проводка обязательна для всех судов и осуществляется ...
0 комментариев