Навигация
Проектирование автоматической системы взвешивания вагонов в статике
25349
знаков
3
таблицы
17
изображений
СОДЕРЖАНИЕ
Введение
1.1 Принцип действия устройства
1.2 Блок-схема устройства
2 Принцип действия блоков схемы
2.1 Первичный преобразователь
2.2 Расчет первичного преобразователя
2.3 Нормирующий преобразотель
2.4 Аналого - цифровой преобразователь
2.5 Выбор мультиплексора
2.6 Выбор микроконтроллера
2.7 Передача информации через последовательный порт
2.8 Настройка контроллера на работу с последов. портом
3.Программирование микроконтроллера
3.1Блок-схема предустановок
3.2Блок-схема измерения веса
3.3Блок-схема вывода инфрмации о весе в компьютер
3.4Блок-схема автокалебровки.
3.5Управление микроконтроллером с компьютера
3.6Программа на ассемблере для микроконтроллера MCS-51
Список литературы
Приложения
В наше время, когда наука и техника достигли очень больших высот, становится возможным моделирование приборов, основанных на микропроцессорах и микроконтроллерах. На этих элементах цифровой электроники можно наряду с новыми аппаратами создавать давно известные, такие как вольтметры, частотомеры, электрические весы, но на базе контроллеров. У таких приборов множество преимуществ. Например, полученные с них данные могут выводиться на экран дисплея или на жидкокристаллический дисплей, они более точны и более универсальны, т.к. перепрограммировав их, можно измерять параметры в других пределах, а если еще произвести небольшое усложнение схем, то можно добиться увеличения функциональных возможностей аппарата. Также значительным преимуществом аппаратов на микропроцессорах является возможность подключения их к компьютерам. В современных системах на различных производствах и т.п. повсеместно используют в виде посредника между датчиком и компьютером быстродействующие аппараты на основе микроконтроллеров. Такие аппараты значительно дешевле, чем на основе компьютеров, но по своим характеристикам не на много им уступают.
Также очень часто приборы на микропроцессорах используются в системах автоматического управления. Процесс протекает строго согласно программам, записанным в память процессоров.
Часто, приборы на микроконтроллере производят прием информации от датчика, преобразуют в определенный формат полученные данные, если необходимо - хранят данные, фильтруют, уплотняют и только после этого передают в компьютер. Таким образом, компьютер не "отвлекается" от главного процесса, -вся "черновая" работа производится контроллером. Информация анализируется компьютером только в случае необходимости, или когда компьютер свободен. Микроконтроллер может даже генерировать прерывание, - такое необходимо, если поступила экстраординарная информация и требуется немедленная реакция на данное событие.
Целью данной работы является проектирование цифровых весов для взвешивания вагонов. Происходит анализ веса, пересчет (суммирование). Затем информация передается в компьютер. Причем можно организовать запись таким образом, чтобы запись производилась только при появлении состава.
Поскольку измерение веса происходит в статике, здесь особенно не важна скорость взвешивания. По этому, применение DSP не целесообразно.
1.1 Принцип действия устройства
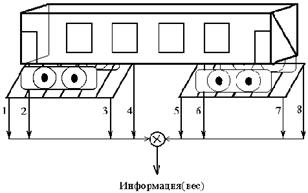
Рис. 1.1.
На рисунке 1.1. изображена схема измерения веса вагона.
Пронумерованными стрелками показано направление потока информации от датчиков. Общее число датчиков выбрано - 8.
Теоретически для описания (задания) плоскости достаточно всего 3 точки. В данном случае необходимо 4 точки, т.к. возможно, что нагрузка на различные точки будет неравномерной, причем может очень сильно различаться. Весы двух платформенные - по этому, общее число точек контроля (датчиков) в два раза больше - 8 штук.
Так, как нагрузка распределяется между опорными точками, в которых расположены датчики, то каждый датчик преобразует частичный вес вагона. Для получения общего веса вагона необходимо просуммировать все частичные весы. Это можно сделать как до оцифровки, так и после. Оцифровка необходима для того, чтобы передать информацию (полученный вес) в компьютер. Причем данные в компьютер могут поступать в любой форме.
Предполагается располагать само устройство возле недалеко от платформ и рельсов. Дело в том, что полезный сигнал, снимаемый с датчиков очень мал (48...48000 мкВ). По этому, для уменьшения уровня помех и уменьшения потерь на соединительных кабелях расстояние должно быть малым. Само устройство подключается к компьютеру через последовательный порт.
Скорость передачи информации в компьютер можно задавать произвольно, т.к. измерение производится в статике.
1.2 Блок-схема устройства
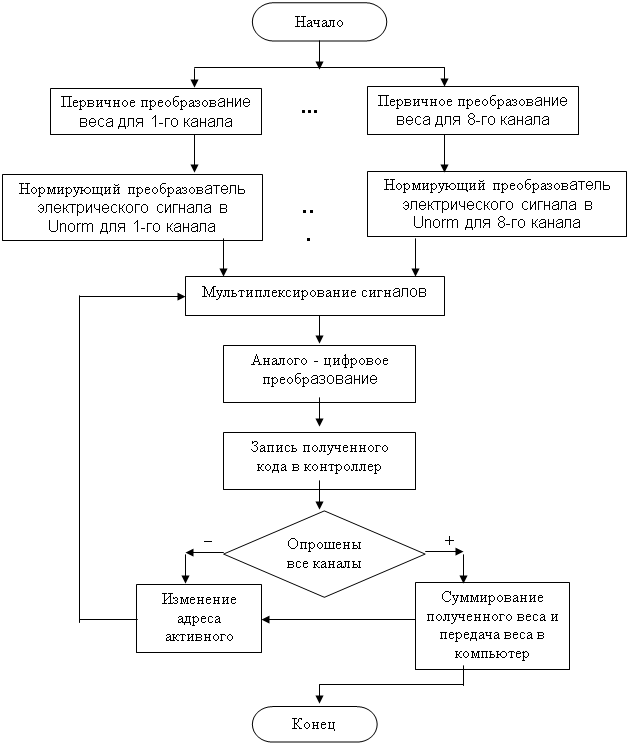
Рис 1.2.1.
На рисунке 1.2.1. изображена блок схема, поясняющая принцип работы схемы. Группа первичных преобразователей производит преобразование веса в соответствующие уровни напряжения. Далее нормирующие преобразователи формируют уровни напряжения Unorm для каждого канала в заданном диапазоне для того, чтобы напряжение было "удобным" для дальнейших с ним действий. Этот процесс происходит непрерывно и независимо от всех остальных.
В то же время происходит цифро-аналоговое преобразование выбранного канала. Причем используется один АЦП, поэтому сигналы мультиплексируются. Мультиплексор управляется микроконтроллером. Полученный код веса записывается в микроконтроллер. Затем, МК меняет адрес канала и процесс преобразования повторяется для нового канала. После того, как будут опрошены все каналы и будут записаны полученные коды, характеризующие частичный вес, происходит суммирование частичного веса. Эта сумма характеризует полный вес вагона.
Затем, данные с устройства передаются в последовательном коде в компьютер. Для этого используется драйвер последовательного порта RS-232. Программа-терминал на компьютере, при необходимости, считывает данные из буфера последовательного порта и высвечивает массу вагона на мониторе.
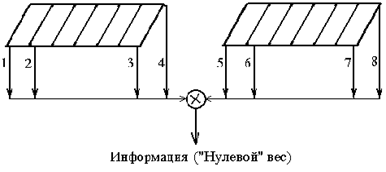
Рис 1.2.2.
На рис. 1.2.2. показана схема калибровки системы.
Калибровка в данном случае представляет собой коррекцию нуля - устройством учитывается вес платформы, рельсов и т.п.
Калибровка осуществляется автоматически и управляется микроконтроллером. Запуск коррекции осуществляется по нажатию кнопки оператора. При этом на мониторе компьютера должен показываться ноль. Следует отметить, что коррекцию производит непосредственно микроконтроллер по каждому каналу, причем компьютер в данной операции не участвует.
Наличие корректировки повышает точность измерения и повышает автономность (автоматичность) данной системы.
При необходимости можно сделать так, чтобы при калибровке, устройство посылало на компьютер "нулевой" вес - т.е. вес при отсутствии вагона - на компьютер. Это позволит контролировать правильность работы устройства.
Похожие работы
... за две-три недели. Во время обследований необходимо избегать нарушений в работе других видов транспорта четкой координацией управления ими. Изучение пассажиропотоков позволяет выявить основные закономерности их колебания для использования результатов обследований в планировании и организации перевозок. Иначе говоря, характер изменения пассажиропотоков на маршрутах и в целом по конкретному ...
... затрат, доходов и финансовых результатов. Затраты на производство промышленной продукции охватывают все материальные, трудовые и денежные затраты, связанные с производственно-хозяйственной деятельностью. Контроль и ревизия затрат на производство и себестоимость продукции помогают обнаружить неиспользованные резервы, непроизводительные затраты и потери. В связи с этим основными заданиями ревизии ...
0 комментариев