БЕЛОРУССКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ИНФФОРМАТИКИ И РАДИОЭЛЕКТРОНИКИ
Кафедра ЭТТ
РЕФЕРАТ
На тему:
«Программно-аппаратная реализация аппаратов электростимуляции»
МИНСК, 2008
Чтобы оценить место, занимаемое электромедицинской аппаратурой в общей системе технических средств, которые используются при диагностике, терапии и обслуживании пациента и объединяются под общим названием медицинская техника, необходимо рассмотреть, хотя бы в общих чертах, ее классификацию (рис. 1).
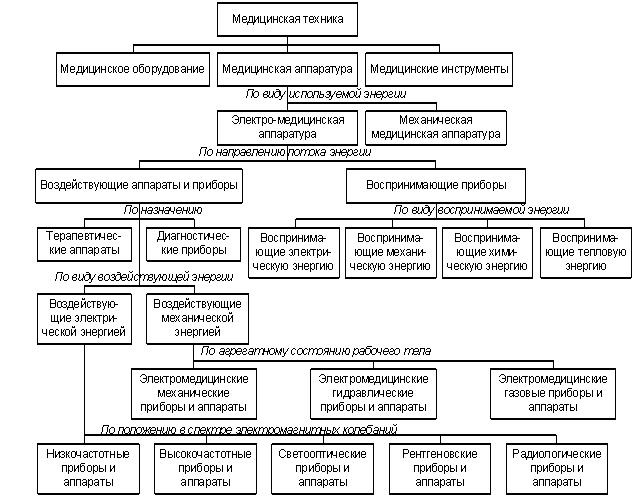
Рисунок 1 – Общая классификация медицинской техники
Всю медицинскую технику можно разбить с точки зрения задачи, решаемой в медицинском технологическом процессе, на три большие группы: аппаратуру, инструменты и оборудование.
Аппаратура обеспечивает в той или иной степени самостоятельный, автоматизированный процесс взаимодействия с пациентом; инструмент действует на пациента в сочетании с рукой человека, являясь как бы ее продолжением; оборудование - вспомогательные устройства для обслуживания пациента и обеспечения медицинского технологического процесса.
Медицинская аппаратура - наиболее сложная, интенсивно развивающаяся область медицинской техники. Большую часть медицинской аппаратуры составляют электромедицинские приборы и аппараты, представляющие собой электротехнические или электронные устройства, которые основаны на использовании электрической энергии.
Имеется также аппаратура, использующая механическую энергию: твердого тела (обычно ее называют просто механической) - аппараты для вытяжения костей, для механотерапии и др.; жидкости (гидравлическая) - водолечебные установки; газа (газовая) - наркозные аппараты, аппараты для искусственной вентиляции легких и др.
В процессе функционирования аппаратуры она оказывается определенным образом связанной с пациентом. При этом в системе аппаратура - пациент устанавливается движение энергии от аппаратуры к пациенту или наоборот. В зависимости от направления потока энергии всю электромедицинскую аппаратуру можно разделить на две части – аппаратуру, воздействующую, и аппаратуру, воспринимающую.
В то же время электромедицинская аппаратура по функциональному признаку, т. е. в зависимости от целей, для которых она используется, может быть разделена на терапевтическую и диагностическую. Изделия терапевтической аппаратуры принято называть аппаратами, изделия диагностической аппаратуры - приборами.
Терапевтические аппараты воздействуют на пациента с целью вызвать желаемые сдвиги в его организме - перестройку патологического процесса в сторону нормализации. Хирургические аппараты, являющиеся частью терапевтических, предназначены для осуществления радикальных изменений в структуре органов, тканей. Таким образом, терапевтические аппараты являются воздействующими.
Диагностические приборы предназначены для исследования характеристик живого организма с тем, чтобы установить возможные отклонения от нормы к вызвавшие их причины. Диагностические приборы могут быть как воздействующими, так и воспринимающими.
Воздействующие диагностические приборы дают необходимую информацию по реакции пациента на определенное воздействие (например, диагностические электростимуляторы) либо по внесенному телом пациента возмущению в поток энергии (рентгеновское просвечивание, ультразвуковая эхография и т. п.). При диагностике воздействующими приборами стремятся, как правило, снизить до минимально возможного уровня энергию воздействия, чтобы исключить побочные вредные для организма эффекты. Предел такому снижению кладет чувствительность организма к воздействию либо чувствительность метода регистрации внесенных возмущений.
Воспринимающие диагностические приборы дают информацию о различных процессах в организме генерируемых тканями и органами биопотенциалах, звуковых тонах сердца, температуре тела и др. Воспринимающие диагностические приборы аналогично любым другим измерительным приборам должны оказывать минимальное влияние на исследуемый процесс и передавать информацию с наименьшими искажениями.
Ниже будет рассмотрена более детальная классификация электромедицинских диагностических приборов и терапевтических аппаратов. Воздействующие терапевтические аппараты и диагностические приборы в зависимости от формы, в которой используется энергия, направленная на пациента, делятся на воздействующие электрической энергией и воздействующие механической энергией (по сложившейся терминологии многие диагностические воздействующие приборы принято называть аппаратами, например, рентгеновские, для электродиагностики и др.).
Аппаратуру, использующую для воздействия механическую энергию, можно разделить по агрегатному состоянию рабочего тела, т. е. тела, непосредственно соприкасающегося с пациентом. Рабочее тело может быть твердым, жидким или газообразным. Соответственно мощно выделить электромедицинские механические, гидравлические и газовые аппараты и приборы. К первым относятся ультразвуковые терапевтические аппараты к диагностические приборы, аудиометры, вибромассажные аппараты и др., ко вторым - аэрозольные аппараты с центробежными и ультразвуковыми распылителями, к третьим - аппараты для искусственной вентиляции легких с электроприводом.
Аппаратура, воздействующая электрической энергией соответственно используемой части спектра электромагнитных колебаний, включает в себя аппараты и приборы низкочастотные, высокочастотные, светооптические, рентгеновские и радиологические.
Дальнейшая классификация дается только для рассмотренных в настоящем курсе терапевтических низкочастотных и высокочастотных аппаратов.
Низкочастотные терапевтические аппараты (рис. 2) делятся на две группы, в зависимости от формы воздействующей электрической энергии (ток, поле). Среди аппаратов, воздействующих током, можно выделить три группы соответственно виду тока (постоянный, переменный или импульсный). Дальнейшее деление этих аппаратов производится по функциональному признаку и включает в себя названия медицинских методик.
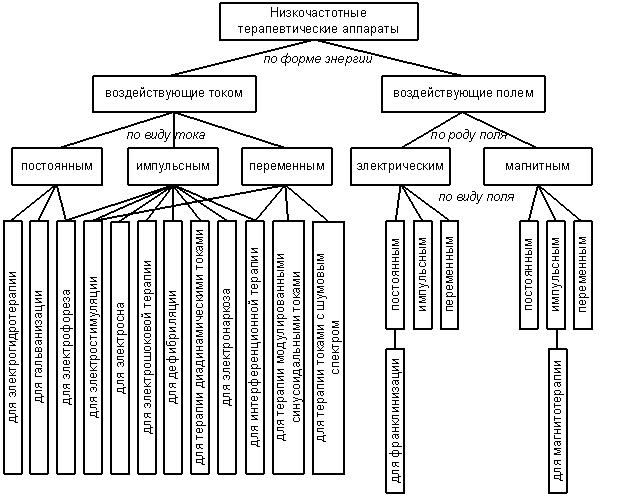
Рисунок 2 – Классификация низкочастотной электротерапевтической аппаратуры.
Аппараты, воздействующие низкочастотным полем, делятся в зависимости от рода поля, т. е. используемой составляющей поля индукции (электрическое, магнитное). Следующая ступень классификации определяется видом поля (постоянно, переменное, импульсное). Дальнейшее деление - по медицинским методикам.
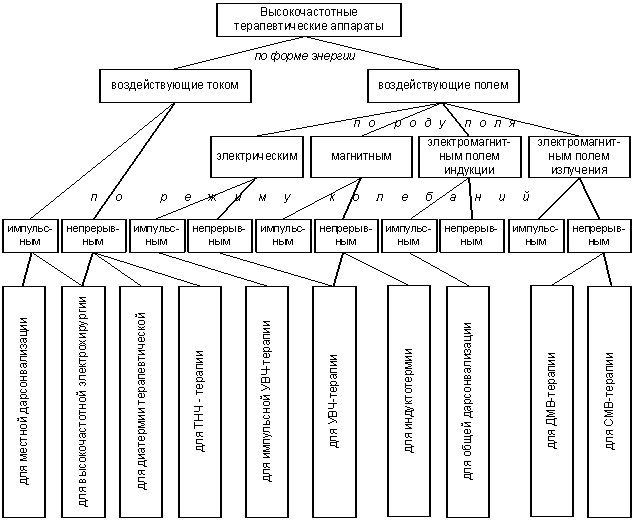
Рисунок 3. – Классификация высокочастотной электротерапевтической аппаратуры.
Высокочастотные терапевтические аппараты (рис. 3) составляют две группы в соответствии с формой используемой энергии (ток, поле). Аппараты, воздействующие полем, делятся на три группы в зависимости от используемой составляющей электромагнитного поля (электрическое, магнитное, электромагнитное). Дальнейшее деление аппаратов воздействующих как током, так и полем в зависимости от режима колебаний (непрерывный, импульсный). Заканчивается классификация высокочастотных терапевтических аппаратов конкретными медицинскими методиками.
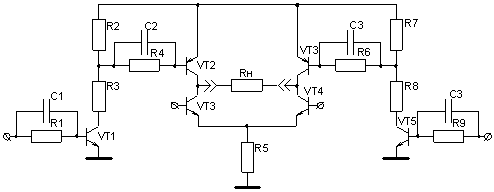
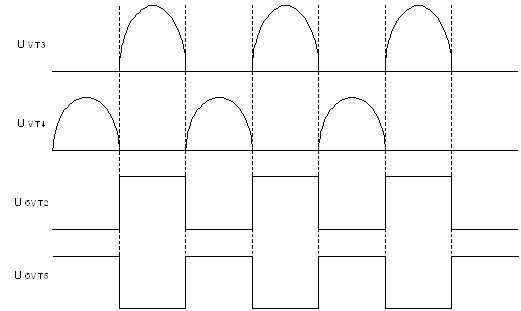
Рисунок 4. – Электрическая мостовая схема выходного каскада со стимуляцией тока
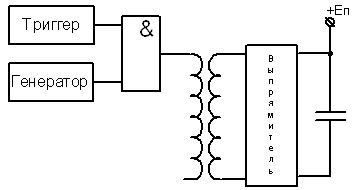
Рисунок 5. – Схема защиты по току
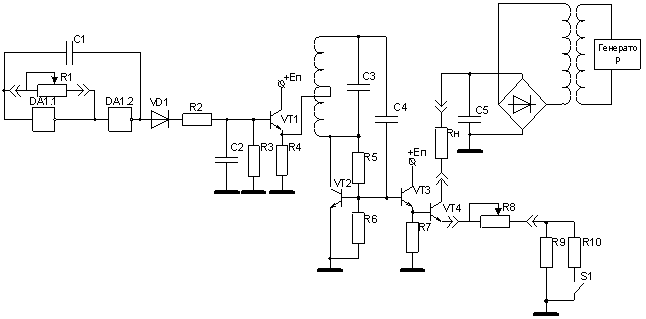
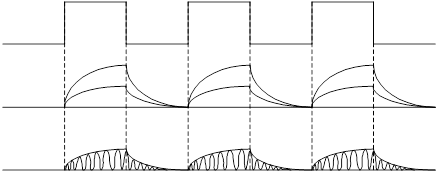
Рисунок 6. – Электрическая схема на основе стимуляции синусоидально модулированным током
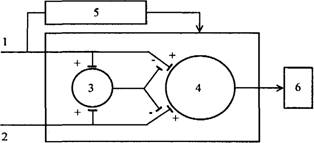
Развитие технологии электронной техники позволяет использовать микропроцессоры и микроконтроллеры для построения терапевтической аппаратуры (рис.7). Обычно имеется возможность управлять следующими параметрами выходных сигналов - длительностью, и скважностью, амплитудой и выходной мощностью и т.д. При помощи микропроцессорных средств управления можно задавать форму и тип импульсов (однополярный/биполярный), а также задавать длительность положительных и отрицательных импульсов. Для задания длительности сигналов в микропроцессорных системах используется блок таймеров, в то время как ЦАП (встроенный или внешний) задает огибающую. Далее сигнал поступает на выходной каскад для усиления. Выходной каскад также обеспечивает гальваническую развязку для защиты пациента в случае выхода прибора из строя.
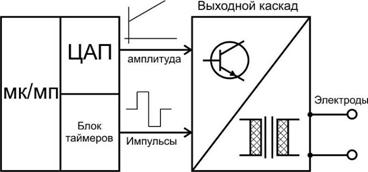
Рисунок 7. – Типовая схема терапевтического прибора
При построении терапевтической техники возможно два подхода: однопроцессорная и многопроцессорная реализация блока управления. Для корректного выбора необходимо учесть следующие аспекты:
1.Необходимость в независимых каналах терапевтического воздействия.
2.Диапазон изменения параметров (как правило, частота) сигнала для каждого канала.
3.Потребность в дополнительных средствах контроля и индикации.
4.Возможности для дальнейшей модернизации и изменений прибора.
Если нет необходимости в независимых каналах терапевтического воздействия, то можно сэкономить средства на разработку и производство изделия, а также существенно уменьшить его размеры. С помощью обычного мультиплексора одноканальный аппарат можно превратить в многоканальный (рис.8). Проблемы начинаются при обеспечении независимого воздействия по нескольким терапевтическим каналам, а также при обеспечении биотехнической обратной связи. Все независимые каналы должны работать одновременно и независимо друг от друга. В следующий период времени, необходимо регистрировать ответную реакцию организма на терапевтическое воздействие. Перекрестные помехи активных каналов могут сделать регистрацию ответной реакции невозможной.
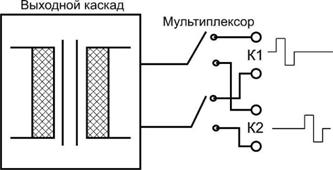
Рисунок 8. – Многоканальное устройство с мультиплексором
Для обеспечения независимой установки частоты для каждого канала, необходимо обеспечить независимые блоки генерации сигналов. Это возможно при использовании мультипроцессорных систем, либо однопроцессорных систем с установкой таймеров для каждого из каналов. Если принять ограничение, что линейка допустимых частот в каналах создается путем умножения базовой частоты, разработка однопроцессорной системы упростится.
Необходимо разработать интерфейс пользователя, т.е. обеспечить возможность ввода параметров процедуры и получения информации о работе устройства. При этом используется широкий спектр приборов, начиная от кнопок, и заканчивая сенсорными экранами, от светодиодов до ЖК мониторов. Кроме того, необходимо обеспечить связь с персональным компьютером (протоколы RS232, USB, TCP/IP). Это позволяет быстро задавать параметры терапевтических процедур, делает возможным применение терапевтического аппарата в комплексе с другими устройствами, позволяет легко анализировать диагностические данные.
Практически, возможны две концепции построения медицинской аппаратуры: однопроцессорное и мультипроцессорное решение. При сравнении этих вариантов необходимо учитывать следующие параметры: независимые каналы терапевтического воздействия, интерфейс пользователя, связь устройства с ПК, внутренняя память устройства.
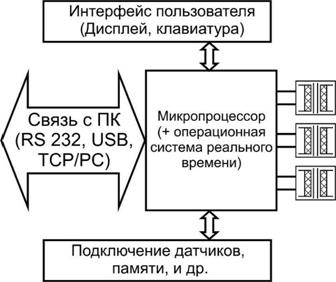
Рисунок 9. – Однопроцессорная терапевтическая система
При разработке однопроцессорной системы (рис.9) необходимо корректно выбрать процессор. Высокопроизводительные процессоры являются дорогостоящими. Системы со слабыми процессорами сложно модифицировать. Кроме того, есть риск, что эти процессоры снимут с производства. Выбранный интерфейс связи с персональным компьютером (ПК) должен быть аппаратно реализован в процессоре. Это экономит процессорное время для решения более важных задач. Определив требования к системе, необходимо продумать структуру программного обеспечения (ПО). Разработчик сталкивается с проблемой задержек в работе процессора (при отсчете временных интервалов и обработке прерываний, при одновременной работе двух таймеров для одного независимого канала, один для отсчета длительности импульса и второй для отсчета полуволны). Кроме того, при реализации связи с ПК, необходимо исключить возможность переполнения буфера. Дополнительные проблемы возникают при необходимости расширении возможностей системы (например, вместо трех, необходимо четыре канала). При увеличении количества задач, возникает необходимость в многозадачной операционной системе. Программа может быть разбита на более понятные, независимые задачи, и может быть легко дополнена дополнительными заданиями. Однако при этом требования к производительности процессора возрастают на два порядка. Кроме того, такая система не может работать в режиме реального времени, что необходимо для генерации терапевтических сигналов. Для устранения этих проблем, необходимо использовать операционную систему реального времени, а так же подходящий процессор.
Идея мультипроцессорной системы (рис.10) заключается в распределении задач между несколькими микропроцессорами или микроконтроллерами. Небольшие (низкопроизводительные и дешевые) процессоры выполняют задачи реального времени, такие как генерация терапевтических сигналов, прием и обработки диагностической информации. Центральный процессор используется для реализации интерфейса пользователя и связи с ПК, для задания начальных условий работы и обработки поступающих данных. Так как задачи реального времени решаются другими устройствами, центральный процессор может быть гораздо менее мощным, по сравнению с однопроцессорными решениями и не требует операционной системы реального времени. Важным этапом при создании мультипроцессорных систем является разработка шины данных. Необходимо разработать структуру подобную шинам SPI или I2C с возможностью передачи данных от ведущего к ведомому и наоборот. Обычно центральный процессор контролирует процесс передачи данных. Иногда возникает необходимость в дополнительном контроллере передачи данных. В таком случае необходимо использовать шины с возможностью работы нескольких ведущих (подобно I2C). Аппаратная поддержка шины может сэкономить время на разработку программы и процессорное время.
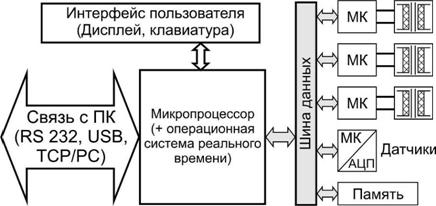
Рисунок 10 – Многопроцессорная терапевтическая система
Таким образом, при создании систем обоих типов, могут возникнуть трудности. При однопроцессорном варианте необходимо разработать операционную систему, работающую в режиме реального времени. Системы являются более надежными, однако расширение такой системы может быть ограничено аппаратными мощностями процессора. Для мультипроцессорной системы в свою очередь возникают проблемы с взаимодействием центрального и периферических процессоров. Необходимо устранять ошибки передачи данных, разработать шину передачи, выбрать и реализовать протокол обмена. Однако разработать такую систему обычно проще. Дополнительный терапевтический или диагностический канал может быть реализован простым добавлением к шине еще одного процессора. Если рассматривать безопасность пациента, можно отметить что в случае сбоя в однопроцессорной системе, стимуляция прекращается по всем каналам. Это хорошо, например, для систем электростимуляции периферической мускулатуры, однако, в случае кардиостимуляции или электростимуляции дыхания это может привести к смерти пациента. В случае сбоя одного из процессоров многопроцессорной системы, выходит из строя только один канал.
ЛИТЕРАТУРА
| 1. | Системы комплексной электромагнитотерапии: Учебное пособие для вузов/ Под ред А.М. Беркутова, В.И.Жулева, Г.А. Кураева, Е.М. Прошина. – М.: Лаборатория Базовых знаний, 2000г. – 376с. | 2000 |
| 2. | Электронная аппаратура для стимуляции органов и тканей /Под ред Р.И.Утямышева и М.Враны - М.: Энергоатомиздат, 2003.384с.. | 2003 |
| 3. | Электрическая стимуляция мозга и нервов у человека / Н.П.Бехтерева, С.В.Медведев, А.Н.Шандурина и др. – Л.:Наука, 1990. -263с. | |
| 4. | Ливенсон А.Р. Электромедицинская аппаратура. :[Учебн. пособие] - Мн.: Медицина, 2001. - 344с. | 2001 |
| 5. | Катона З. Электроника в медицине: Пер. с венг. / Под ред. Н.К.Розмахина - Мн.: Медицина 2002. - 140с. | 2002 |
Похожие работы




... – измеритель переходного процесса; 9. – запоминающее устройство; 10. – устройство управления. 2.2 Синтез структурной схемы блока определения длительности стимула для устройства электроанальгезии Блок определения длительности стимулирующего импульса для аппарата электроанальгезии является совокупностью трех блоков устройства для электроанальгезии, которые представлены под цифрами 8 -10 ...


... факторы, определяющие конкретное содержание ППФП студентов. 1.5. Личная и социально – экономическая необходимость психофизиологической подготовки человека к труду. Тема 2. Особенности профессионально – прикладной физической подготовки студентов машиностроительных специальностей (2 часа). 2.1.Профессиографическая характеристика трудовой деятельности инженеров-механиков. 2.2. Проблема переноса ...
... процесса (от 24 ч до нескольких минут) способствует сохранению качества и снижению бактериальной обсемененности мяса. 4. Причины и методы предотвращения фактической естественной убыли мяса и мясопродуктов при холодильной обработки Термическая обработка мяса на холодильниках является одним из важнейших процессов на мясокомбинатах, основное назначение которого - способствовать сохранению ...


... : – консолидация предприятий, организаций и учреждений, занятых обслуживанием туристов; – расширение спектра регионального турпродукта; – организация акций и мероприятий, содействующих развитию туризма в Курской области (выпуск проспектов, буклетов, появление информации о регионе в Интернете и туристских газетах и журналах; различные ярмарки и концертные программы); ...
0 комментариев