Навигация
Программно управляемый частотомер
50623
знака
2
таблицы
4
изображения
Введение
В современном обществе по мере познания им природы все более возрастает роль измерений. Соответственно непрерывно увеличивается объем измерительной информации – информации о значениях измеряемых физических величин, повышаются требования к качеству и способам ее обработки и использования.
Наибольшее распространение в современной науке и технике получают цифровые измерительные приборы и преобразователи, используемые для измерений, дистанционной передачи измерительной информации, в качестве промежуточных преобразователей для ввода информации в цифровые вычислительные машины и др.
Основные требования, предъявляемые к средствам измерений - это высокая точность; быстродействие; возможность автоматизации процесса измерений; представление результатов измерений в форме, удобной для обработки, в том числе с помощью ЭВМ; малые габариты и вес; высокая надежность.
Разрешить проблему сочетания точности и быстродействия позволили цифровые приборы. Цифровыми измерительными приборами называются приборы, осуществляющие автоматически в процессе измерения операции квантования измеряемой величины, ее цифровое кодирование и представление результатов измерения в цифровой форме непосредственно в виде числа или кода.
Отсутствие подвижных частей в приборах позволило резко увеличить их надежность и долговечность. Представление измерительной информации в цифровой форме дает возможность обработки ее в ЭВМ. Сравнительно легко осуществляется автоматизация процесса измерений.
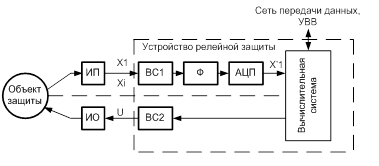
Несмотря на схемные и конструктивные особенности, принцип построения цифровых приборов одинаков (рис.1).
|
|
|
Измеряемая величина поступает на входное устройство прибора ВУ, где происходит масштабное преобразование. С входного устройства сигнал поступает на аналого-цифровой преобразователь АЦП, где аналоговый сигнал преобразуется в соответствующий код, который отображается в виде числового значения на цифровом отсчётном устройстве ЦОУ. Для получения всех управляющих сигналов в цифровом приборе предусмотрено устройство управления (УУ) (на рис. 1 не показано).
Входное устройство цифрового прибора устроено аналогично электронному прибору, а в некоторых конструкциях на его входе используется фильтр для исключения помех.
В зависимости от принципа аналого-цифрового преобразования (АЦП) цифровые измерительные приборы разделяют на устройства прямого преобразования и компенсационные (с уравновешивающим преобразованием).
Современный инженер, работающий в любой отрасли промышленности, должен уметь выбрать и назначить соответствующие устройства измерений для управления технологическим процессом, контроля качества продукции, должен знать об основных метрологических характеристиках средств измерения.
1.Назначение прибора
Цифровой частотомер с программным управлением применяется на промышленных предприятиях и электротехнических лабораториях и предназначен для измерения частот в широком диапазоне.
Данный прибор может использоваться для настройки, испытаний и калибровки различного рода приемо-передающих трактов, фильтров для настройки систем связи и других устройств.
1.1.Технические данные
· Диапазон частот 1Гц÷1МГц;
· Входное напряжение 0,5÷10В;
· Класс точности 0,1%;
· Статическая индикация, количество разрядов не менее 3-х.
· Минимальная длительность импульса входного сигнала - 5нсек.
· Рабочие условия эксплуатации:
· -Температура окружающей среды -30°С ÷ +50°С;
· -Относительная влажность воздуха 95% при температуре до 35°С;
· -Атмосферное давление 61÷103 кПа.
· Среднее время наработки прибора на отказ не менее 10000 часов.
2.Принцип действия прибора
Описываемый метод измерения позволяет измерять частоты с малой и постоянной погрешностью в широком диапазоне. Измеряемый сигнал поступает на вход прибора и преобразуется в периодическую последовательность импульсов, период следования которых Тх равен периоду исследуемого сигнала. Независимо от этой последовательности формируются первые временные ворота длительностью Δt1. Они заполняются n импульсами периодической последовательности. Затем число n фиксируется. Отношение Δt1/n соответствует значению T´x измеряемой частоты, а величина n/Δt1 – значению f΄x частоты. Его отклонение от значения fx определяется погрешностью дискретности, уменьшение которой и является целью применения данного метода.
Рис.2: «Диаграммы работы частотомера»
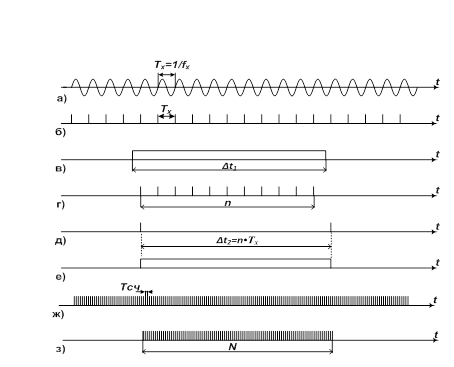
Одновременно формируются вторые временные ворота, такие, что их фронт соответствует импульсу последовательности, появившемуся сразу после начала первых ворот, а срез – импульсу, возникающему сразу после окончания первых ворот. Таким образом, длительность вторых временных ворот целому числу периодов исследуемого сигнала, т. е. Δt2=nTx.
Фронт и срез образованных ворот синхронизированы с моментами появления импульсов периодической последовательности, сформированной из исследуемого сигнала, поэтому погрешность округления исключается. Вторые временные ворота заполняются счетными импульсами, число N которых фиксируется.
Формула для нахождения значения измеряемой частоты получают следующим образом. Число импульсов, попавшие во вторые временные ворота определяется отношением N=nTx/Tсч=nFсч/fx, откуда
 , (1)
, (1)
где Fсч – частота следования счетных импульсов, значение которой известно.
Точность измерения частоты определяется погрешностью дискретности измерения интервала времени nTx.
Можно определить значение относительной погрешности дискретности измерения частоты δf. Максимальное значение относительной погрешности дискретности измерения интервала времени Δt2=nTx определяется через абсолютную погрешность. Так как этот интервал заполняется счетными импульсами с периодом следования Тсч, то максимальная абсолютная погрешность Δ2=±Тсч. Тогда максимальная относительная погрешность
δ2=±Тсч/Δt2=±Tсч/nTx (2)
Равенство Δt2=nTx можно представить в виде fx=n/Δt2. Тогда в соответствии с правилами вычисления погрешностей косвенных измерений погрешность измерения функции fx связана с погрешностью измерения аргумента Δt2 соотношением (с точностью до второго порядка малости)
δf=δ2
После подстановки δ2 из (1)
δf=±Тсч/nTx=±(fx/n)Тсч (3)
При подстановке в (3) вместо fx/n отношения f'x/n=1/Δt1 получается
δf=±Тсч/Δt1=±1/FсчΔt1 (4)
Формула (4) приводит к выводу, что максимальное значение относительной погрешности дискретности измерения частоты изложенным вариантом метода дискретного счета не зависит от значения измеряемой частоты и, следовательно, постоянно во всем диапазоне измерения.
Необходимая при этом частота дискретизации
Fсч=1/(δfΔt1), (5)
где δf – заданная погрешность дискретности измерения.
К примеру, при частоте следования счетных импульсов 10 МГц и длительности временных ворот 1 с (как это имеет место в некоторых частотомерах) максимальное значение погрешности дискретности равно ±10-
Таким образом, примененный в данном проекте метод измерения позволяет проводить измерения частоты от 1 Гц до 1МГц без изменения пределов и метода измерения. Исключаются дополнительные операции контроля значения измеряемой частоты.
Похожие работы
... наличия напряжений питания Х3, Х5: +5В; +12В; -12В; +3.3 В. Размер печатной платы: 112 х 90 мм. Разрабатываемый макет также может использоваться в качестве универсального программируемого модуля для разработки различных РЭУ, а также в качестве измерительного контроллера часов, датчиков температуры и других подобных приложений бытовой техники и автоматики. Кроме того, удобен в применении, ...
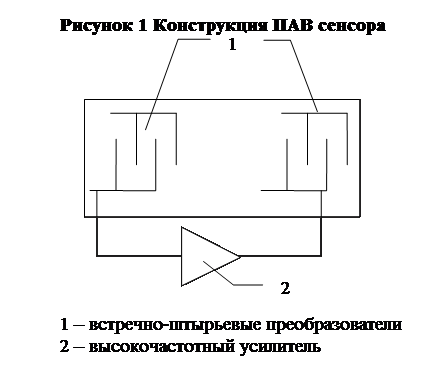
... является измерение сдвига частоты. То есть в качестве сенсорного эффекта в данном типе датчиков используется различие рабочих частот поверхностно-акустической волны прибора в различных средах. Некоторые задачи, решаемые ПАВ сенсорами В работе [6] авторами решена задача классификации ароматов и определения степени свежести пищевых продуктов по запаху с использованием аналитической микросхемы, ...
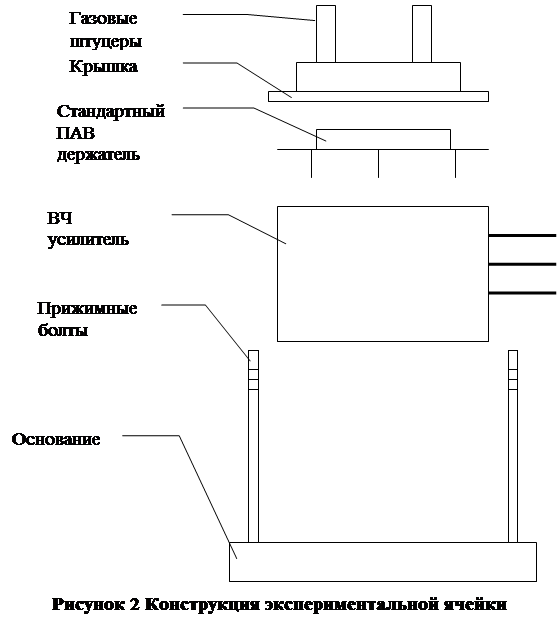
... можно пренебречь. А основное время процесса будет состоять из времени определения частоты поверхностно-акустической волны, времени подвода газа необходимой концентрации и пр. Таким образом, получаем еще одно подтверждение необходимости дальнейшего повышения автоматизации измерительной установки. Для математического получения градуировочной характеристики ПАВ датчика воспользуемся уравнением [20]: ...
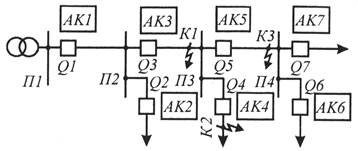
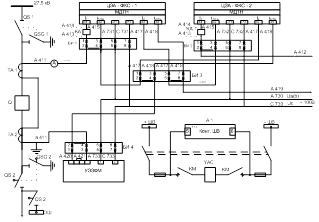
... задаются в поле задания уставок. 6. Безопасность и экологичность проекта В основной части дипломного проекта рассмотрены вопросы, связанные с модернизацией релейной защиты РУ-27,5 кВ тяговой подстанции Заудинск ВСЖД. Наличие на подстанции высоковольтного оборудования и значительных по величине токов определяет выбор темы, и содержание раздела "Безопасность и экологичность проекта", связанных ...
0 комментариев